












Nizhniy Novgorod, Russian Federation
The commissioned passenger cruise ship Golden Ring with a set of innovative propulsion systems: a wheel-propulsion steering system and an azimuth thruster is considered. The propulsors of the vessel are equipped with frequency drives, which makes it possible to implement both discrete (step) control of the rotation speed of the propeller wheels and continuous control of the characteristics of these units. Ratio of wheel rpm allows manipulating direction and magnitude of thrust of propulsors. The azimuthal thruster is mounted in the bow of the vessel and allows for a stop in any direction over the entire power range. The mathematical modeling of the motor ship motion is carried out in various embodiments of controlling the process of holding the ship on a given trajectory under wind impact. The parameters of the ship control and control system operation were compared with the use of wheel propulsors during continuous and stepped control, as well as when the ship is kept on course using a thruster. It has been found that in case of discrete (step) control of propulsors, which is used by navigators in manual control, it is difficult to provide good quality indicators of the control process, since the stage of change in the rotation speed of the propeller wheel is quite painful. In this case, a constant change in the rotation speed of one or the other co-forest is required. Discrete control of the thruster (in on/off mode at fixed power) also does not give good results. The implementation of algorithms for automatic control of propulsors in analog mode both using co-forest propulsors and a thruster ensures the movement of the ship along a given trajectory with sufficient accuracy in practice.
wheel-propulsive steering system, azimuthal thruster, control algorithm, automatic control system, dynamic characteristics of the vessel
Введение
Появившиеся в последнее время колесные суда обладают уникальными техническими характеристиками, позволившими, в частности, возродить круизный маршрут по Волге и Оке «Нижний Новгород – Москва (Северный речной вокзал) – Москва (Южный речной вокзал) – Нижний Новгород». Используемый движительно-рулевой комплекс судна требует высокого уровня квалификации судоводителя. Существенно повысить качественные показатели процесса управления позволяет внедрение систем, реализующих высокоэффективные алгоритмы управления. Создание таких алгоритмов требует изучения динамических характеристик судна при совместном использовании различных типов движителей с учетом внешних воздействий.
Материалы исследования
В навигацию 2023 г. вышел в первый рейс колесный пассажирский круизный дизель-электри-ческий теплоход «Золотое кольцо» [1–3]. Теплоход имеет длину 81,6 м, ширину 13,83 м, высоту 9,5 м. Осадка судна не превышает 1,2 м, площадь боковой проекции – 680 м², поперечной – 113 м².
Судно рассчитано на эксплуатацию, в том числе, на мелководных реках, что предопределило оснащение судна колесным движительно-рулевым комплексом (КДРК). В корме судна по бортам расположены два оригинальных гребных колеса диаметром 6 м с раздельными частотными приводами. Гребные колеса имеют винтовые плицы, установленные под некоторым углом к оси колеса. В результате формируется вектор упора гребного колеса под углом α к диаметральной плоскости судна (до 15°), что обеспечивает наряду с продольной составляющей вектора тяги появление поперечной составляющей, создающей вращающий момент. Меняя соотношение частот вращения гребных колес (следовательно, меняя величину поперечной составляющей векторов тяги гребных колес), судоводитель обеспечивает управление судном. Традиционный руль отсутствует. Управление скоростью производится изменением частот вращения гребных колес, а изменение направления вектора тяги – изменением соотношения частот вращения гребных колес.
Гребные колеса приводятся в движение асинхронными двигателями с частотными преобразователями частоты. Частотные приводы позволяют плавно менять частоты вращения гребных колес от нуля до максимальных значений, исключая возникновение механических перегрузок движительного комплекса, в то же время обеспечивая хорошую управляемость судна. Ограничение пусковых токов, наряду с увеличением срока эксплуатации двигателей, существенно снижает требования к мощности судовой электростанции [4, 5]. С учетом малой осадки на судне установлено азимутальное подруливающее устройство (АПУ), повышающее маневренность судна [6].
Судно построено под техническим наблюдением Нижне-Волжского филиала Российского классификационного общества. 01 июня 2023 г. закончено техническое наблюдение за строительством и проведено первоначальное освидетельствование пассажирского теплохода «Золотое кольцо» класса «‡ О2,0А» проекта ПКС-180 [7].
В навигацию 2023 г. теплоход использовался на линии «Московская кругосветка» по маршруту «Нижний Новгород – Москва – Нижний Новгород» по рекам Оке и Волге (рис. 1).
Рис. 1. Теплоход «Золотое кольцо» (автор фото М. Назаркин)
Fig. 1. Motor ship Golden Ring (photo by M. Nazarkin)
Конструктивные особенности корпуса (плоское дно, малая осадка, большая парусность, отсутствие руля) обусловливают их отличие от традиционных судов. В частности, значительное влияние на динамику судна оказывает ветровое воздействие. На рис. 2 представлена зависимость крутящего момента, создаваемого ветром MR, от его величины и направления [8–10].
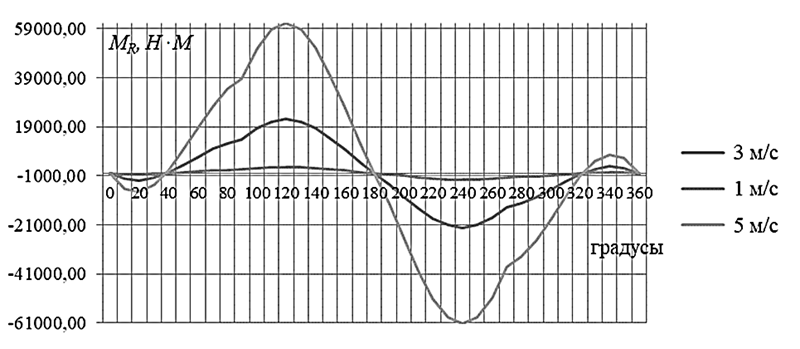
Рис. 2. Зависимость крутящего момента, создаваемого ветром, от его величины и направления
Fig. 2. The dependence of the torque generated by the wind, from its magnitude and direction
Конструктивные особенности судна и его уникальный набор движителей (гребные колеса и АПУ) предъявляют специфические требования к разработке алгоритмов управления судном. В [11] проведен анализ маневренных качеств судна и эффективности использования различных типов рулевых устройств (КДРК и АПУ) при выполнении стандартных маневров, используемых при испытаниях судов в соответствии с Резолюцией ИМО [12, 13].
В качестве примера на рис. 3 приведены результаты компьютерного моделирования маневра «зигзаг» при использовании либо КДРК (рис. 3, а), либо АПУ (рис. 3, б). Для получения корректных результатов было подобрано такое соотношение частот вращения колес, которое бы создавало такое же значение поперечной составляющей упора, как и при использовании АПУ [11].
Результаты моделирования [11] позволяют сделать вывод о высокой эффективности набора движителей судна, способных обеспечить управление судном в различных условиях плавания.
Цель статьи – изучить динамику судна при совместном использовании различных типов движителей (КДРК и АПУ) с учетом внешних воздействий, разработать алгоритмы совместного автоматического управления движителями, обеспечивающие высокое качество управления.

а б
Рис. 3. Результаты компьютерного моделирования маневра «зигзаг»:
а – при использовании КДРК; б – при использовании АПУ
Fig. 3. The results of computer simulation of the zigzag maneuver:
a – when using a wheel-propulsion steering system; б – when using an azimuth thruster
Управление судном с помощью колесно-движи-тельного рулевого комплекса
Обеспечить эффективную и безопасную эксплуатацию судов с КДРК позволяет использование цифровых устройств автоматизации. С этой целью для теплохода «Золотое кольцо» разработана и установлена система контроля и управления судовым комплексом (СКУ) [14, 15], которая обеспечивает контроль и управление КДРК и АПУ, дистанционное управление агрегатами и оборудованием судна, диагностику компонентов системы управления и агрегатов, аварийно-предупреди-тельную сигнализацию и т. д. (рис. 4).

Рис. 4. Рубка теплохода «Золотое кольцо» (автор фото М. Назаркин)
Fig. 4. The wheelhouse of the ship Golden Ring (photo by M. Nazarkin)
Управление приводами гребных колес осуществляется двумя джойстиками. В системе предусматриваются два режима управления: в первом режиме один джойстик задает частоту вращения левому колесу, другой – правому; во втором режиме один из джойстиков используется для выбора скорости судна, второй – для определения направления движения, в этом случае частоты вращения гребных колес рассчитываются компьютером по заданному алгоритму.
Комплексная СКУ судном способна реализовать алгоритмы автоматического управления отдельными функциями судовождения, в частности движением судна по заданной траектории даже при существенных ветровых нагрузках. Результаты компьютерного моделирования движения судна по линейной траектории при поперечном ветровом воздействии приведены на рис. 5 (скорость ветра составляет 5 и 10 м/с, соответственно 1 и 2).
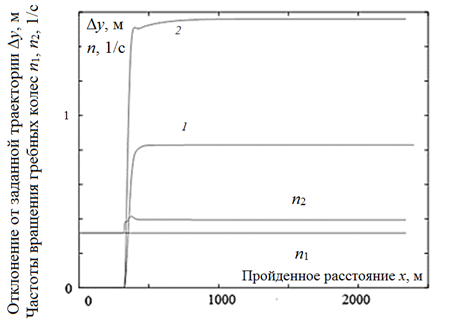
Рис. 5. Автоматическое удержание теплохода на траектории с помощью гребных колес
Fig. 5. Automatic holding of the ship on the trajectory with the help of propeller wheels
Имея возможность раздельного управления частотными приводами гребных колес, СКУ подстраивает соотношение частот вращения гребных колес для обеспечения движения по заданному курсу. Траектория центра масс судна смещается на 0,8 м и 1,6 м, соответственно, судно движется по параллельной траектории с углом дрейфа 2° и 4° (траектории 1 и 2 на рис. 5). На рис. 5 также приведены частоты вращения гребных колес n1 и n2 при скорости ветра 10 м/с. Частота вращения одного гребного колеса остается постоянной, частота второго принимает новое значение.
Качественные показатели снижаются при дискретном способе формирования управляющего сигнала, что может быть реализовано как для автоматического управления, так и для ручного. В СКУ реализовано шестиступенчатое формирование управляющего сигнала (рис. 6) на каждое из гребных колес. Каждому положению джойстика соответствует фиксированное значение частоты вращения колес.
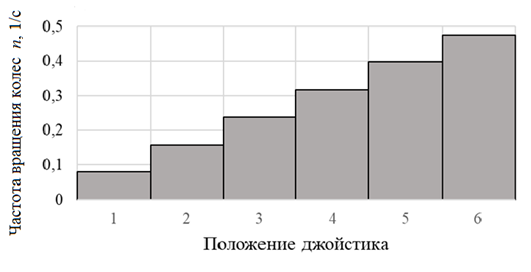
Рис. 6. Дискретное формирование управляющего воздействия
Fig. 6. Discrete formation of control impact
Динамические характеристики судна при дискретном управлении приведены на рис. 7. Частота вращения гребных колес составляет n1= n2 = 0,3173 1/с, или n1 = n2 = 2/3nmax. При t = 150 c появляется боковой ветер 5 м/с. Судно смещается на 6 м и продолжает двигаться по параллельной траектории (на рис. 7, б условно показано положение судна, движущегося по траектории с углом дрейфа в 2°). Удержание производится попеременным изменением частот вращения гребных колес на одну ступень (примерно одно переключение за 5 с для каждого колеса на рис. 7, а).


а б
Рис. 7. Динамика судна при дискретном управлении и ветре 5 м/с: а – изменение скорости судна V, м/с, и частоты вращения гребных колес n1 и n2, 1/с; б – отклонение от траектории Δy, м, и пройденный курс х, м
Fig. 7. Vessel dynamics with discrete control and wind of 5 m/s: а – change of vessel speed V, m/s, and speed of propeller wheels rotation n1 and n2, 1/s; б – deviation from trajectory Δ y, m, and completed heading x, m
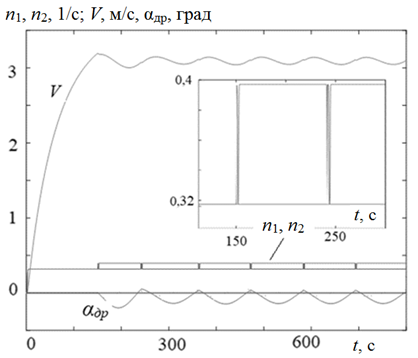
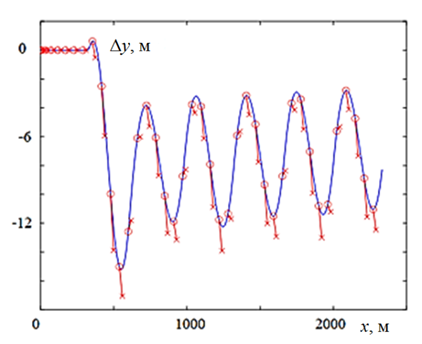
Динамика судна при ветре 10 м/с приведена на рис. 8. При таком ветре не всегда удается стабилизировать судно на курсе (рис. 8, б), особенно при снижении скорости движения.
а б
Fig. 8. Vessel dynamics with discrete control and wind of 10 m/s: а – change of vessel speed V, m/s, speed of propeller wheels n1 and n2, 1/s, and drift angle αдр, deg; б – deviation from trajectory Δy, m, and completed heading x, m
Управление судном с помощью азимутального подруливающего устройства
Судоходство по реке Оке с ее мелководьем и извилистым фарватером требует высокого уровня квалификации судоводителя. Управление гребными колесами осуществляется в ручном режиме двумя независимым джойстиками с шестиступенчатым формированием управляющего воздействия (см. рис. 6). Как подтверждает опыт навигации 2023 г., не на всех участках удается обеспечить нужное качество управления, используя только КДРК. На некоторых участках судоводитель вынужден использовать АПУ.
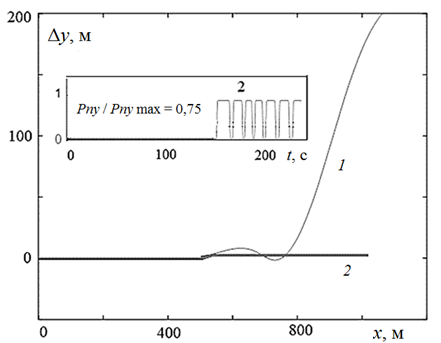
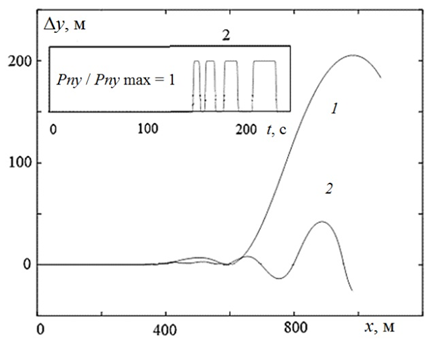
Простейший способ использования подруливающего устройства – его включение/выключение при постоянном значении упора. На рис. 9 показаны результаты компьютерного моделирования использования подруливающего устройства при поддержании постоянного упора упора (Рпу / Рпу max = 0,75 (рис. 9, а) и Рпу / Рпу max = 1 (рис. 9, б)).
При определенном соотношении параметров судна и воздействия окружающей среды удается обеспечить удержание судна на траектории при дискретном управлении подруливающим устройством (траектория 2 на рис. 9, а, здесь же на врезке показан упор подруливающего устройства). В этом случае равновесное состояние достигнуто при скорости движения судна 10 км/ч, боковом ветре 10 м/с и Рпу / Рпу max = 0,75. Изменение соотношения параметров приводит к невозможности удержания судна на траектории при дискретном управлении подруливающим устройством (кривая 1 на рис. 9 для скорости ветра 5 м/с, кривая 2 на рис. 9, б – при скорости ветра 10 м/с).
а б
Рис. 9. Динамика судна при дискретном управлении подруливающим устройством:
а – Рпу / Рпу max = 0,75; б – Рпу / Рпу max = 1
Fig. 9. Vessel dynamics with discrete control of the thruster: а – Рпу / Рпу max = 0,75; б – Рпу / Рпу max = 1
Система автоматического управления позволяет использовать потенциальные возможности АПУ в полном объеме. Мощность установленного на «Золотом кольце» АПУ (рис. 10) – 100 кВт [6]. При автоматическом управлении направление упора АПУ устанавливается в положение ±90° относительно диаметральной плоскости судна (в зависимости от направления внешнего воздействия), удержание судна осуществляется регулированием величины упора. Результаты математического моделирования отображены на рис. 11.
Обороты колес поддерживаются постоянными (n1, n2 = const), судно движется по параллельной траектории со смещением 1 м и углом дрейфа 2,20° (кривая 1 для ветра 5 м/с) или со смещением 2,3 м и углом дрейфа 5,10° (кривая 2 при силе ветра 10 м/с).
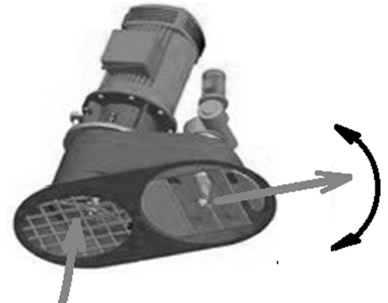
Рис. 10. Азимутальное подруливающее устройство
Fig. 10. Azimuth handler
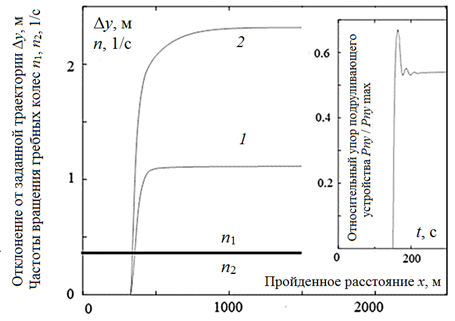
Рис. 11. Динамика судна при аналоговом управлении подруливающим устройством
Fig. 11. Vessel dynamics during analog control
of the thruster
На врезке рис. 11 показаны изменения упора при подстройке к условиям движения при ветре 10 м/с. Система управления быстро находит равновесное значение упора АПУ, обеспечивающего движение судна по заданной траектории с незначительным для практики смещением.
Заключение
Комплект движителей судна (колесно-движи-тельный комплекс и азимутальное подруливающее устройство) обеспечивают хорошую управляемость судна в различных условиях плавания. Движители судна снабжены частотными приводами, позволяющими реализовать как дискретное (ступенчатое) управление частотой вращения гребных колес, направлением и величиной упора подруливающего устройства, так и непрерывное управление характеристиками этих агрегатов.
Как свидетельствует практика эксплуатации судна, даже опытный судоводитель не в состоянии длительное время осуществлять управление движителями в аналоговом режиме при сохранении высокого качества управления. В реальных условиях судоводители предпочитают режим дискретного управления движителями судна. Однако этот способ управления не всегда обеспечивает требуемое качество.
Максимально использовать потенциальные возможности установленных инновационных движителей можно лишь при реализации автоматического управления агрегатами в аналоговом режиме.
1. Fal'monov E. V. Kolesnyi dvizhitel'no-rulevoi kompleks [Wheeled propulsion and steering system]. Patent RF № 2225327; 10.03.2004.
2. Galkin D. A., Malyi Iu. A. Ot «Sury» k «Zolotomu kol'tsu» [From the Surah to the Golden Ring]. Rechnoi transport (XXI vek), 2015, no. 2 (73), pp. 32-33.
3. Galkin D. A. Unikal'nyi turisticheskii teplokhod, ili kak razvivat' otrasl' v sovremennykh usloviiakh [A unique tourist ship, or how to develop the industry in modern conditions]. Rechnoi transport (XXI vek), 2016, no. 2 (78), pp. 21-23.
4. Burda E. M., Galkin D. N., Kornev A. B. Innovatsionnaia grebnaia elektricheskaia ustanovka passazhirskogo kolesnogo sudna [Innovative rowing electric installation of a passenger wheeled vessel]. Rechnoi transport (XXI vek), 2016, no. 1 (77), pp. 24-26.
5. Khvatov O. S., Burda E. M., Tarpanov I. A., Kshtaltnyi N. I. Variant edinoi elektrostantsii kolesnogo sudna s elektrodvizheniem [A variant of a single power plant of a wheeled vessel with electric propulsion]. Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Morskaia tekhnika i tekhnologiia, 2016, no. 2, pp. 102-108.
6. Azimutal'nye dvigateli [Azimuth engines]. Available at: http://www.vethpropulsion.com/products/bowthrusters/compact-grid_en.html (accessed: 25.01.2024).
7. Passazhirskii teplokhod «Zolotoe kol'tso» proekta PKS-180 [Passenger ship Golden Ring of the PKS-180 project]. Available at: https://rfclass.ru/events/2023/05/passazhirskiy-teplokhod-zolotoe-koltso-proekta-pks-180/1 (accessed: 25.01.2024).
8. Bychkov V. Ia., Grosheva L. S., Pliushchaev V. I. Matematicheskaia model' sudna s kolesnym dvizhitel'no-rulevym kompleksom «Zolotoe kol'tso» [Mathematical model of a vessel with a wheeled propulsion and steering complex Golden Ring]. Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Morskaia tekhniki i tekhnologiia, 2018, no. 3, pp. 36-46.
9. Bychkov V. Ia., Grosheva L. S., Pliushchaev V. I. Raschet sil vetrovogo vozdeistviia na korpus sudna s kolesno-dvizhitel'nym rulevym kompleksom [Calculation of the forces of wind action on the hull of a vessel with a wheel-propulsion steering system]. Vestnik Volzhskoi gosudarstvennoi akademii vodnogo transporta, 2018, iss. 55, pp. 11-20.
10. Bychkov V. Ia., Grosheva L. S., Pliushchaev V. I. Dinamika sudna s kolesnym dvizhitel'no-rulevym kompleksom v usloviiakh vneshnikh vozdeistvii [Dynamics of a vessel with a wheeled propulsion and steering complex in conditions of external influences]. Morskie intellektual'nye tekhnologii, 2019, no. 4, vol. 2, pp. 139-146.
11. Grosheva L. S., Merzliakov V. I., Pliushchaev V. I. Manevrovye kachestva sudov s kolesnym dvizhitel'no-rulevym kompleksom [Maneuvering qualities of vessels with a wheeled propulsion and steering system]. Morskie intellektual'nye tekhnologii, 2021, no. 2, vol. 1, pp. 154-159.
12. IMO MSC/137(76). Standarty manevrennykh kachestv sudna: Rezoliutsiia ot 05.12.2002 [IMO MSC/137(76). Standards of maneuverability of the vessel: Resolution dated 05.12.2002]. Available at: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MSCResolutions/MSC.137(76).pdf (accessed: 25.01.2024).
13. ND 2-030101-007. Rukovodstvo po opredeleniiu manevrennykh kharakteristik sudov [ND 2-030101-007. Guide-lines for determining the maneuverability characteristics of ships]. Rossiiskii morskoi registr sudokhodstva. Saint Petersburg, Izd-vo RMRS, 2005. 16 p.
14. Pliushchaev V. I., Galkin D. N., Ital'iantsev S. A. Komp'iuterizovannaia sistema upravleniia passazhirskim ko-lesnym teplokhodom [Computerized control system for a passenger wheeled motor ship]. Rechnoi transport (XXI vek), 2014, no. 6 (71), pp. 35-37.
15. Burda E. M., Perevezentsev S. V., Pliushchaev V. I. Kompleksnaia avtomatizatsiia sudovykh tekhnologicheskikh protsessov kolesnykh sudov [Integrated automation of marine technological processes of wheeled vessels]. Morskie intellektual'nye tekhnologii, 2021, no. 4, vol. 1, pp. 180-188.
