












Russian Federation
Nizhniy Novgorod, Russian Federation
The article highlights the study of the influence of wind parameters and operating modes of the propulsion plant on the quality indicators of motion control of the vessel with a paddle type propulsion and steering system. The dynamics of the vessel motion is considered on the basis of a mathematical model of a paddle vessel. Wind action has a significant impact on the dynamic characteristics of the vessel due to its design features: flat bottom, shallow draft, large windage. The effect of apparent and true wind with both constant and variable wind parameters and operating modes of the propulsion plant is analyzed. Conclusions are drawn about the limits of the vessel controllability for various parameters of motion and wind action. The operability area of the vessel control system is constructed depending on the direction and speed of the wind. It is noted that a change in the speed of the vessel leads to a change in the parameters of the apparent wind, which in turn affects the dynamics of the vessel. To compensate for the effect of wind changes there is proposed an algorithm for changing the speed of the vessel while keeping a given optimal trajectory under wind impact. The algorithm is designed subject to the control of the ratio of the rotational speed of the propeller wheels, without taking into account the impact of the thruster. A computer simulation of the ship’s movement was performed with a changing speed of movement and different parameters of the wind effect, taking into account the proposed algorithm. The proposed control algorithm makes it possible to compensate for the effect of apparent wind in transient operating modes of the propulsion plant, to ensure movement along a given trajectory and to improve the accuracy of ship control.
paddle vessel, paddle wheel drives, dynamic characteristics of the vessel, control system, control algorithms, true and apparent wind
Введение
Ветровое воздействие оказывает серьезное влияние на качественные показатели процесса управления судном [1, 2]. В полной мере это относится
к новому виду судов с колесным движительно-рулевым комплексом [3]. Речные колесные суда этого типа являются плоскодонными и мелкосидящими, имеющими большую парусность. Движителем и управляющим органом являются гребные колеса, расположенные в кормовой части судна по бортам с независимыми частотными приводами. Управлять судном возможно лишь посредством изменения соотношения частот вращения гребных колес. Конструктивные особенности судна (плоское дно, малая осадка, большая парусность) предопределяют существенное влияние на динамику такого рода судов ветрового воздействия.
Материалы и цель исследования
На рис. 1 представлена зависимость крутящего момента, создаваемого ветром MR, от его величины и направления [4]. Ситуация усугубляется при одновременном изменении скорости судна и истинного ветра, способствующем заметным изменениям величины и направления кажущегося ветра, следовательно, и крутящего момента.
Влияние ветрового воздействия на динамические характеристики судна при изменении параметров истинного ветра
Математическая модель колесного судна, приведенная в [5], позволяет изучить динамику судна при движении в различных режимах в условиях внешних воздействий. Достаточно легко синтезировать алгоритм управления, обеспечивающий компенсацию ветра при прямолинейном движении судна с постоянной скоростью. В качестве примера на рис. 2 приведены результаты машинного моделирования процесса удержания колесного судна на траектории при боковом ветре (в правый борт) при изменении скорости истинного ветра в диапазоне Vв = 0–15 м/с с шагом в 2,5 м/с. Скорость судна Vс = 9 км/ч (эта скорость достигается при частотах вращения колес n1 = n2 = 0,5nmax). Частота вращения колес задается системой управления, формирующей управляющее воздействие Uhod в диапазоне от 0 до 1 (при Uhod = 1n1 = n2 = nmax). Задание Uhod определяет начальное значение n1 = n2 = nзад, после чего система управления, независимо меняя n1 и n2, обеспечивает удержание судна на заданной траектории.
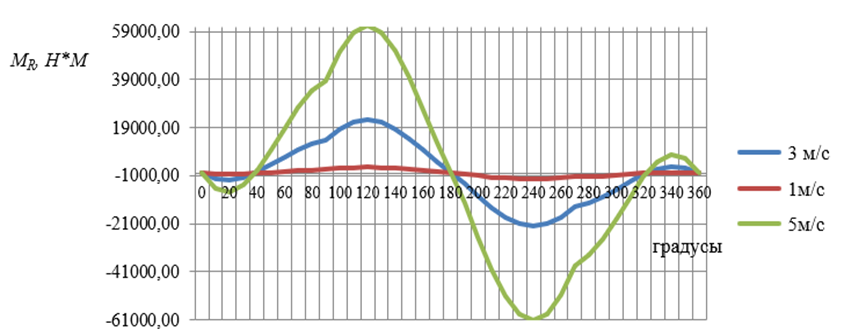
Рис. 1. Зависимость крутящего момента, создаваемого ветром, от его величины и направления
Fig. 1. Dependence of the torque generated by the wind on its magnitude and direction
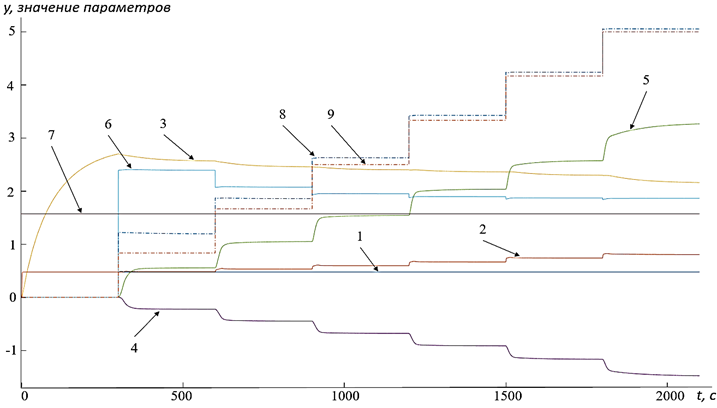
Рис. 2. Влияние ветра на динамику судна: 1 – частота вращения левого колеса n1 · 2;
2 – частота вращения правого колеса n2 · 2; 3 – поступательная скорость; 4 – α · 10; 5 – отклонение от курса;
6 – угол кажущегося ветра; 7 – угол реального ветра; 8 – величина реального ветра Vв/3, м/с;
9 – величина кажущегося ветра Vвк/3, м/с
Fig. 2. Influence of wind on the dynamics of the vessel: 1 - rotation frequency of the left wheel n1 · 2;
2 - rotation frequency of the right wheel n2 · 2; 3 - translational speed; 4 – α · 10; 5 - deviation from the course;
6 - angle of apparent wind; 7 - angle of real wind; 8 - magnitude of the real wind Vв/3, m/s;
9 - magnitude of the apparent wind Vвк/3, m/s
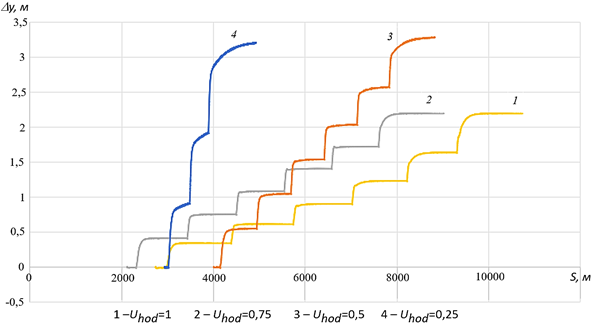
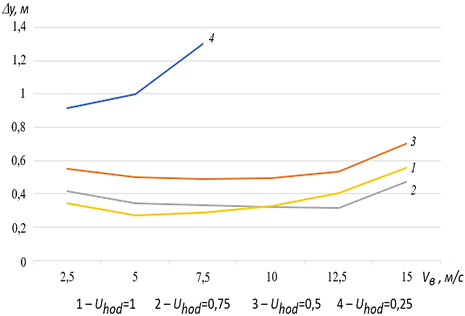
На рис. 2 представлены изменения величины скорости ветра Vв, скорости Vвх и угла ψвк кажущегося ветра. Очевидно, что направление и величина кажущегося ветра отличаются от параметров реального ветра и меняются в основном при изменении скорости истинного ветра и скорости судна (эта величина в данном примере меняется незначительно). При отсутствии ветра частоты колес вращения равны, судно движется по оси х (заданный курс α = 0). При появлении ветра возникает вращающий момент (см. рис. 1), стремящийся развернуть судно по часовой стрелке. Предложенный алгоритм оставляет частоту вращения n1 одного из колес неизменной, частоту вращения второго n2 увеличивает, компенсируя вращающий момент, создаваемый ветром. Судно смещается на параллельную траекторию (смещение Δy) и продолжает двигаться прежним курсом с углом α, зависящим от силы кажущегося ветра. При Vв = 15 м/с смещение от заданной траектории не превышает 3,3 м, что является приемлемой величиной для практики (при этом угол между диаметральной плоскостью судна и заданным направлением увеличивается примерно до α = 70°. При снятии ветрового воздействия судно возвращается на заданную траекторию. На рис. 3 представлены зависимости отклонений судна от заданной траектории при изменении параметров истинного ветра (Vв = 0–15 м/с с шагом в 2,5 м/с) и частоты вращения гребных колес (n1 = n2 = 0,25–1,0nmax с шагом 0,25nmax). На рис. 3, б, в приведено абсолютное отклонение от первоначальной траектории и относительное отклонение Δyотн (величина смещения траектории при увеличении скорости ветра на 2,5 м/с).
а
б в
Рис. 3. Траектории движения судна при изменении параметров истинного ветра и режимов движения (а),
абсолютное (б) и относительное (в) отклонения судна от заданной траектории
Fig. 3. Trajectories of the vessel’s movement when changing the parameters of the true wind and the modes of movement (a), absolute (б) and relative (в) deviations of the vessel from the specified trajectory
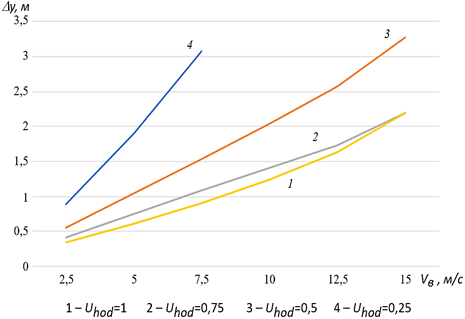
Очевидно, что управляемость судна при изменении параметров ветра выше при высоких частотах вращения гребных колес (следовательно, и скорости движения судна). Относительное смещение Δyотн при этом примерно постоянное при каждом шаге увеличения скорости истинного ветра на 2,5 м/с. Некоторая «неидеальность» характеристик определяется специфичной конструкцией судна и сложной зависимостью крутящего момента, создаваемого ветровым воздействием, от параметров ветра (см. рис. 1). Для n1 = n2 = 0,25nmax алгоритм обеспечивает удержание судна на заданной траектории лишь до Vв = 10 м/с, а для n1 = n2 = 0,1nmax судно уходит с траектории уже при Vв = 2,5 м/с (что обусловлено малой осадкой и большой парусностью судна). На рис. 4 проиллюстрировано изменение параметров движения судна при линейном увеличении/уменьшении силы ветра, показана скорость истинного ветра Vв, скорость Vвк и угол ψвк кажущегося ветра для Uhod = 0,5. Здесь же приведены результаты расчетов отклонения судна от траектории для 4-х значений заданного управляющего воздействия, определяющего скорость движения судна, Uhod = 0,25; 0,5; 0,75 и 1,0. Очевидно, что со снижением скорости движения судна величина отклонения от заданной траектории Δyотн под воздействием ветра повышается. При максимальной скорости ветра Vв = 5 м/с отклонение от траектории увеличивается с Δyотн = 2,3 м при Uhod = 1,0 до Δyотн = 3,2 м при Uhod = 0,25.
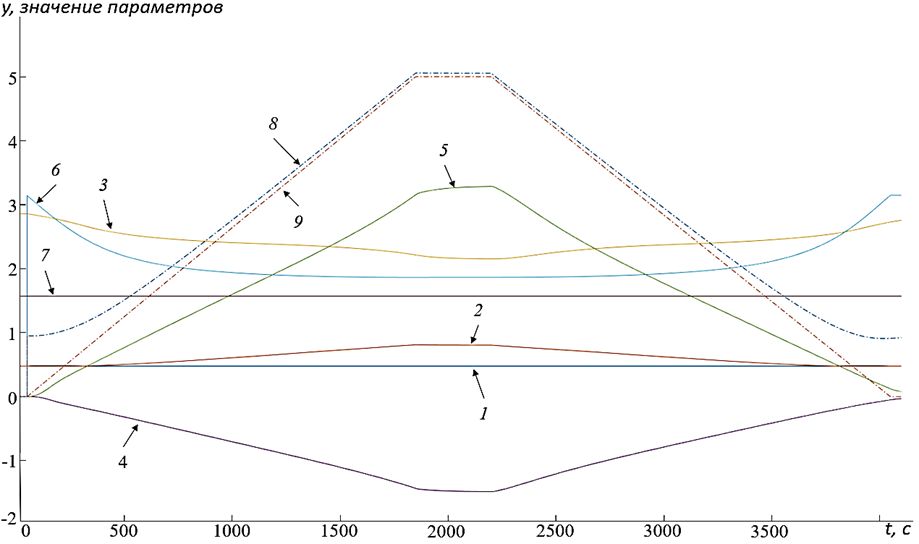
Рис. 4. Параметры движения при линейном изменении скорости ветра: 1–9 (см. рис. 2)
Fig. 4. Influence of wind on the dynamics of the vessel: 1-9 (Fig. 2)
В значительной степени динамика судна зависит от направления истинного ветра (см. рис. 1). В качестве примера на рис. 5 приведены результаты расчетов параметров движения судна при последовательном изменении с шагом в 450 направления истинного ветра (для Vв = 12,5 м/с) при заданном режиме движения с Uhod = 0,75. Естественно, при изменении направления истинного ветра существенно меняются и параметры кажущегося ветра (скорость Vвк и угол ψвк кажущегося ветра на рис. 5), а следовательно, и скорость судна (Vс). Алгоритм обеспечивает удержание судна вблизи заданной траектории (с отклонением примерно до ±3 м), но характер переходных процессов меняется в зависимости от направления ветра. Как отмечалось выше, столь значительное влияние параметров ветра на динамические характеристики судна определяется его конструктивными особенностями (малая осадка, плоское дно, большая парусность, дизайн корпуса). Очевидно, что нельзя обеспечить удержание судна на траектории во всем диапазоне возможных на практике изменений параметров внешнего воздействия. На рис. 6 приведена область работоспособности (расположена под приведенной поверхностью) системы управления судном, полученная в результате компьютерного моделирования.
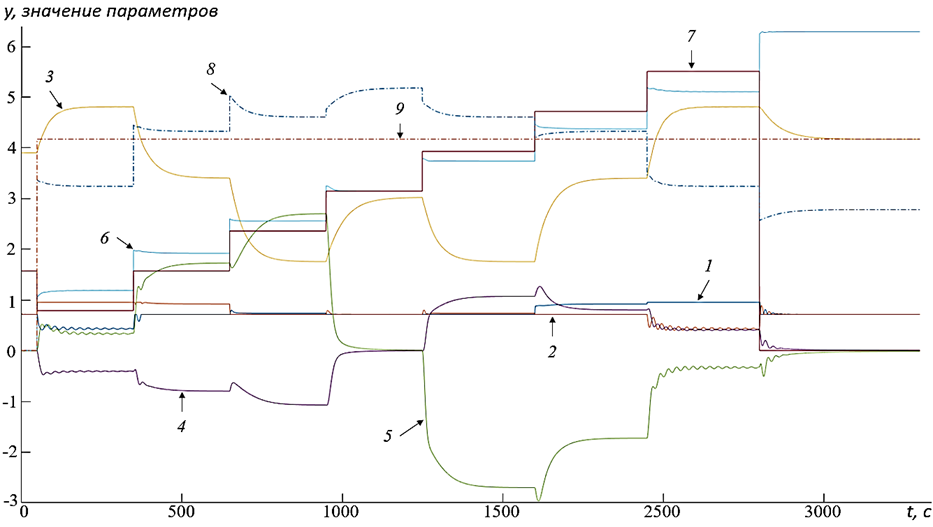
Рис. 5. Динамика судна при изменении направления ветра: 1–9 (см. рис. 2)
Fig. 5. Dynamics of the vessel when the wind direction changes: 1-9 (Fig. 2)
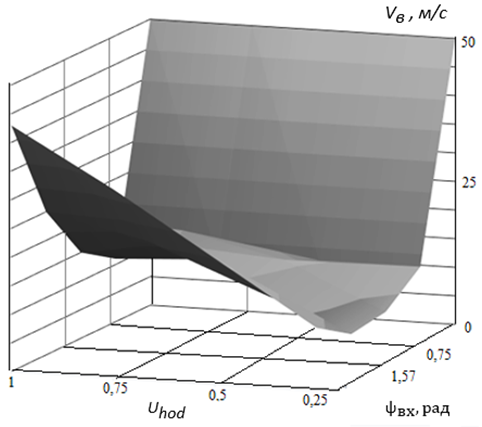
Рис. 6. Область работоспособности системы управления судном
Fig. 6. Area of operability of the ship control system
Область работоспособности существенно снижается с уменьшением скорости судна (снижения частоты вращения гребных колес), поскольку снижающийся упор гребных колес не может компенсировать ветровое воздействие. Сложная форма поверхности определяется конструктивными особенностями корпуса и характером изменения крутящего момента в зависимости от направления и скорости ветра (см. рис. 1). 1. Влияние ветрового воздействия на динамические характеристики судна при движении с переменной скоростью. На рис. 7 представлены динамические характеристики судна при снижении скорости и боковом ветре.
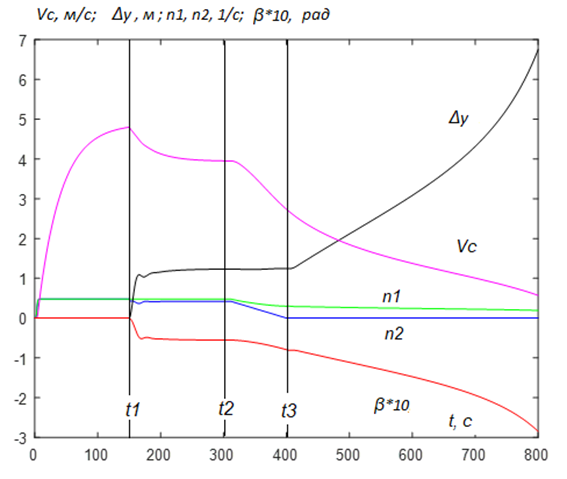
Рис. 7. Динамические характеристики колесного судна в режиме торможения
Fig. 7. Dynamic characteristics of a paddle vessel in braking mode
К моменту t1 судно набрало максимальную скорость Vc при максимальной частоте вращения колес n1 = n2 = 0,48 1/с. В момент t1 появляется поперечный боковой ветер (Vв = м/с; ϕ = 3π/2), судно смещается примерно на 1 м и продолжает следовать тем же курсом. За счет появления разности частот вращения гребных колес сохраняется ориентация корпуса судна (угол не превышает 40 град). Поскольку частота вращения n2 второго колеса уменьшилась, скорость судна начинает снижаться. При t2 = 300 с частота вращения второго колеса за 100 с линейно снижается до нуля. При этом алгоритм управления за счет регулирования частоты вращения n1 первого колеса поддерживает ориентацию корпуса судна. При t1 > 200 с, как отмечалось выше, величина и угол кажущегося ветра существенно меняются. После остановки второго колеса t3 > 400 с алгоритм не в состоянии обеспечить движение судна заданным курсом в связи с ограничением возможностей исполнительного устройства – движительного комплекса. Одно гребное колесо не в состоянии обеспечить стабилизацию корпуса судна в условиях внешних воздействий. Скорость судна снижается, отклонение от курса Δy и угол дрейфа β начинают возрастать.
2. Синтез алгоритма управления. Изменение скорости судна приводит к изменению параметров кажущегося ветра, что в свою очередь оказывает влияние на динамику судна. Для компенсации влияния изменений ветра предлагается следующий алгоритм управления. При изменении скорости движения в условиях ветрового воздействия целесообразно на время маневра сохранять разницу частоты вращения колес, соответствующую предыдущей скорости движения:
ΔU = │U1ст – U2ст│,
где U1ст, U2ст – текущие значения управляющих воздействий на приводы гребных колес, которые зависят от Uhod и параметров ветра.
Поскольку изменение скорости происходит довольно медленно (большая инерционность судна), это позволит сохранить положение корпуса, обеспечивающее движение судна в окрестности заданной траектории. По завершении маневра алгоритм управления движением судна по траектории автоматически подстроит частоты вращения колес для движения с новой скоростью. Формирование управляющих воздействий происходит следующим образом. Сначала определяется текущая разница частот вращения колес ΔU. Затем в зависимости от текущего направления корпуса и нового значения Uнов.hod, управляющие воздействия раскладываются на гребные колеса.
Если U1ст < U2ст (направление корпуса влево), новые значения управляющих воздействий формируются как
В случае если U2нов > 1 (максимальное управляющее воздействие), формирование управляющих воздействий осуществляется следующим образом:
Если U1ст > U2ст (направление корпуса вправо), то
В случае если U1нов > 1 (1 – максимальное управляющее воздействие), формирование управляющих воздействий осуществляется следующим образом:
где U1нов, U2нов – новые значения управляющих воздействий на приводы гребных колес.
Сформированные управляющие воздействия выдаются на приводы гребных колес и обеспечивают их переход на вращение с новой частотой n1,2 = U1,2 · nmax.
По завершении маневра изменения частоты вращения колес алгоритм управления движением по траектории автоматически подстроит частоты вращения колес для движения с новой скоростью.
3. Обсуждение. Работа описанного алгоритма продемонстрирована на рис. 7. Скорость Uhod ступенчато снижается: с 1 до 0,25 с шагом 0,25 при боковом ветре Vв = 10 м/с.
Судно начинает движение с Uhod = 1 (n1 = n2 = nmax). При t1 = 150 с появляется боковой ветер Vв = 10 м/с. Обороты одного из колес уменьшаются, тем самым компенсируется вращающий момент на корпус судна, создаваемый ветром. Судно смещается примерно на 1,2 м и продолжает двигаться с некоторым углом дрейфа параллельно заданной прямолинейной траектории. Скорость судна снижается до 4 м/с. В момент t2 задающее воздействие на приводы гребных колес снижается до Uhod = 0,75 при сохранении в момент переключения разницы частот вращения колес Δn1, соответствующей предыдущей скорости движения (рис. 8). По этому же алгоритму происходит снижении скорости
в моменты времени t3 и t4. При снижении скорости смещение судна и угол дрейфа увеличиваются. При Uhod = 0,25 (t > t4) судно становится неуправляемым, т. к. упоры гребных винтов становятся меньше сил ветрового воздействия на корпус судна (области управляемости представлены на рис. 6).
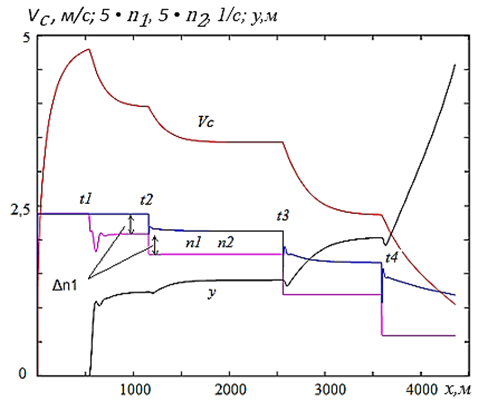
Рис. 8. Влияния ветрового воздействия на судно при торможении
Fig. 8. Effect of wind action on the vessel under braking
Динамика судна при разгоне при реализации предложенного алгоритма представлена на рис. 9 (задающее воздействие Uhod меняется с 0,25 до 1
с шагом 0,25 при боковом ветре Vв = 10 м/с). При появлении ветра в момент t1 и Uhod = 0,25 судно плохо управляется, наблюдается его снос от заданной траектории на 4,7 м. По мере увеличения скорости судна отклонение судна от заданной траектории уменьшается до 1,2 м.

Рис. 9. Динамические характеристики судна при разгоне
Fig. 9. Dynamic characteristics of the vessel under acceleration
Заключение
Предложенный алгоритм управления позволяет компенсировать влияние кажущегося ветра в переходных режимах работы гребной установки и обеспечить движение по заданной траектории.
1. Ricci A., Janssen W. D., van Wijhe H. J., Blocken B. CFD simulation of wind forces on ships in ports: Case study for the Rotterdam Cruise Terminal // Journal of Wind Engineering and Industrial Aerodynamics. 2020. V. 205. P. 104315.
2. Höffmann M., Roy S., Berger A., Bergmann W., Chan K., Shubbak M., Langhorst J., Schnauder T., Struß O., Büskens C. Wind Affected Maneuverability of Tugboat-Controlled Ships // IFAC-PapersOnLine. 2021. V. 54. Iss. 16. P. 70-75.
3. Pat. RF № 2225327. Kolesno-dvizhitel'nyy ru-levoy kompleks / Fal'monov E. V.; zayavl. 30.11.2001; opubl. 10.03.2004.
4. Bychkov V. Ya., Grosheva L. S., Plyuschaev V. I. Raschet sil vetrovogo vozdeystviya na korpus sudna s kolesno-dvizhitel'nym rulevym kompleksom // Vestn. Volzh. gos. akad. vod. transp. 2018. Vyp. 55. S. 11-20.
5. Bychkov V. Ya., Grosheva L. S., Plyuschaev V. I. Matematicheskaya model' sudna s kolesnym dvizhitel'no-rulevym kompleksom «Zolotoe kol'co» // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Morskaya tehniki i tehnologiya. 2018. № 3. S. 36-49.
