












Russian Federation
Russian Federation
Russian Federation
Modern research in the field of oceanology in the Arctic region, studying the ice conditions, environmental and climatic monitoring, prospecting and hydrographic works, monitoring of extended bottom structures, oceano-graphic measurements, search for sunken objects, chemical and physical measurements of the aquatic environment, research of underwater objects and bottom topography cannot be imagined without the use of autonomous unmanned submersibles. Underwater robotics is rapidly developing. In the course of technological progress the scope of applications of autonomous unmanned submersible crafts has significantly expanded. The priority areas of robotics involve developing the intelligent methods and models to control operation of the autonomous submersibles in the extreme and uncertain environmental conditions, developing the architecture of autonomous submersibles, and solving problems of navigation and communication. Each class of autonomous submersible crafts has not only the advantages, but also the disadvantages that limit the scope of their application. Analysis and comparison of autonomous submersibles are carried out, the trends in their development are determined. The alternative classification of autonomous unmanned underwater crafts by the shape of the hull. Various versions of autonomous underwater vehicles and examples of underwater robotics are illustrated. Autonomous unmanned submersible crafts having a bluff shape, well-streamlined cylindrical shape, well-streamlined non-cylindrical shape, well-streamlined bionic shape are considered in detail, the system of control over the submersibles is analyzed.
automated unmanned submersible crafts, oceanology, robotics, propeller, hull shape
Введение
Развитие робототехники и потребительского спроса обусловило становление такого направления, как автономные подводные аппараты, которые условно можно разделить на два больших класса – обитаемые и необитаемые. Наибольший интерес для исследования представляют необитаемые подводные аппараты (НПА), работающие в автоматическом режиме или дистанционно управляемые по кабель-тросу оператором, находящимся на берегу или судне-носителе [1]. Они имеют ряд преимуществ по сравнению с обитаемыми подводными аппаратами (ОПА). Главным преимуществом НПА является высокая безопасность для человека-оператора, который находится вне погружной части аппарата и может управлять им дистанционно. Следовательно, нет необходимости размещать на НПА сложную систему жизнеобеспечения, что позволяет облегчить конструкцию НПА и уменьшить его габаритные размеры. Современный уровень технологий позволяет создавать полностью автономные НПА, которые являются уникальными сооружениями и решают широкий круг задач: картирование дна, батиметрическая съемка, экоконтроль, контроль состояния воды, съемка рельефа
и поддонной структуры дна, обследование донных сооружений, участие в поисково-спасательных операциях, выполнение осмотровых работ, выполнение исследовательских работ, обследование затонувших объектов, обследования нефтяных станций, задачи прикладной и теоретической океанологии, участие в судоподъеме [2–4]. Целью работы является анализ и систематизация классификационных признаков НПА по форме корпуса с учетом современного опыта их строительства.
Методы и материалы исследования
В Российской Федерации согласно ГОСТ P 56960‑2016 определена классификация НПА
(рис. 1) [4]. Данная классификация применяется во всех видах документации, в частности в работах, относящихся к подводным техническим средствам,
а также в отчетной документации, использующей результаты этих работ.
В 2012 г. (до вступления в силу ГОСТ P 56960‑2016) автором книги «Телеуправляемые подводные аппараты» Д. В. Войтовым был предложен вариант классификации НПА по нескольким признакам [5]. Согласно ГОСТ P 56960-2016 все многообразие подводных аппаратов разбивается на систему пересекающихся множеств объектов. Так как многие виды аппаратов могут быть объединены в непересекающиеся множества сразу по
нескольким признакам, такая классификация представляется более удобной.
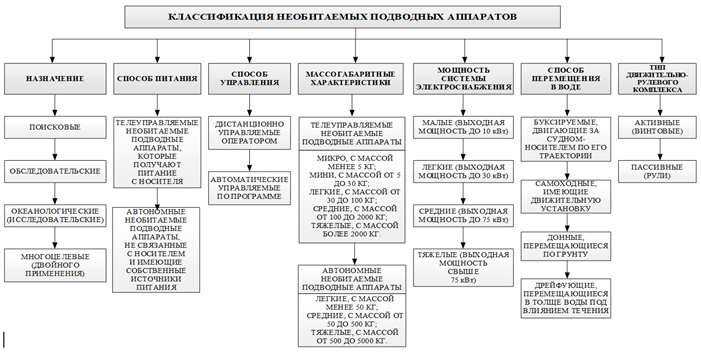
Рис. 1. Классификация необитаемых подводных аппаратов
Fig. 1. Classification of unmanned underwater vehicles
Признаки, по которым проводится комплексная классификация:
– по назначению;
– глубине погружения;
– весу или размеру;
– мощности движителей;
– типу привода;
– цене.
В настоящее время все многообразие необитаемых привязных подводных аппаратов можно разделить на семь основных категорий (таблица).
Комплексная классификация необитаемых подводных аппаратов
Comprehensive classification of unmanned underwater vehicles
|
Класс |
Вес, кг |
Назначение |
Глубина, м |
Привод |
Мощность, л.с |
Цена, |
|
Микро/мини |
≤ 5 |
Осмотр |
≤ 150 |
Электрический |
≤ 5 |
≤ 50 |
|
Малые |
≤ 30 |
Осмотр |
≤ 600 |
Электрический |
≤ 10 |
≤ 100 |
|
Малые глубоководные |
≤ 150 |
Осмотр, сбор материалов |
> 3 000 |
Электрический |
≤ 25 |
≤ 1 000 |
|
Средние |
≤ 500 |
Работы |
≤ 2 000 |
Электро-гидравлический |
≤ 100 |
≤ 1 000 |
|
Большие |
≤ 1 500 |
Тяжелые работы, подъем |
≤ 3 000 |
Электро-гидравлический |
≤ 250 |
> 1 000 |
|
Большие |
> 1 500 |
Тяжелые работы, подъем |
> 3 000 |
Электро-гидравлический |
> 250 |
> 1 000 |
Современные НПА также можно разделить на две большие группы: телеуправляемые и автономные. Конструкции НПА могут быть и гибридного или комбинированного типа с возможностью переоборудования. Данный вид НПА стремительно развивается и имеет тенденцию к развитию в направлении малогабаритных автономных НПА [6].
В последнее время увеличилось количество разнообразных форм корпуса и систем управления НПА, что необходимо учитывать при определении расчета движения [7].
Результаты и их обсуждение
Для сравнительного анализа и оценки пропульсивных и маневренных качеств подводных аппаратов сотрудниками лаборатории мореходных качеств судов ФГБОУ ВО «Государственный университет морского и речного флота им. адмирала С. О. Макарова» был предложен альтернативный классификационный признак: типовая форма обводов корпуса подводного аппарата. Форма обводов корпуса, как правило, определяется назначением подводного аппарата. В последнее время начали появляться аппараты новых форм, предназначенные для выполнения прежних задач. Сравнительный анализ форм корпусов подводных аппаратов производился без учета их назначения, районов использования и предельной глубины погружения.
Согласно предлагаемой классификации все многообразие подводных аппаратов можно разбить на четыре группы по форме корпуса:
- плохо обтекаемой формы;
- хорошо обтекаемой цилиндрической формы;
- хорошо обтекаемой нецилиндрической формы;
- хорошо обтекаемой бионической формы.
Ниже приводится краткая характеристика аппаратов каждой группы. Аппараты бионической формы будут рассмотрены подробнее ввиду перспективности заимствования их форм при создании собственного прототипа.
Аппараты плохо обтекаемой формы, как правило, представляют собой открытую рамную конструкцию с отсеком плавучести, закрепленным
в верхней части. К нижней части рамы крепится навесное оборудование и (в отдельных случаях) шасси для перемещения по грунту. Главным преимуществом аппарата такой конструкции является универсальность оснащения, поскольку нет необходимости вписываться в заранее установленные проектировщиком обводы корпуса. Кроме того, подобная конструкция позволяет производить переоснащение непосредственно перед спуском
в зависимости от конкретной задачи.
Недостатком является большое сопротивление формы аппарата и, как следствие, увеличенные затраты энергии на перемещение и позиционирование. Аппараты такой компоновки используются для подробных локальных исследований или работ, например обследования затопленного объекта [8, 9]. Аппараты плохо обтекаемой формы, как правило, являются привязными. Основные виды конструкций корпуса, навесного оборудования подобных аппаратов описаны, например, в статьях [10, 11].
Аппараты хорошо обтекаемой цилиндрической формы. Наиболее распространенной формой корпуса такого аппарата является продолговатая цилиндрическая форма, иногда c балластом или сплюснутая в вертикальной или горизонтальной плоскости, с подводными крыльями. Аппараты обеспечивают достаточно высокую скорость продольного перемещения при достаточно низкой поворотливости [12].
К этой группе относятся торпедообразные аппараты с протяженной цилиндрической вставкой. Для аппаратов характерна закругленная форма носовой оконечности и коническая форма кормовой оконечности. В кормовой оконечности крестообразно или Х-образно располагаются стабилизаторы или кольцевая насадка. Отношение длины к диаметру таких аппаратов находится в пределах от 5 до 10.
Гражданское применение аппаратов цилиндрической формы в основном ограничено проведением поисковых, гидрографических работ, а также для мониторинга протяженных придонных конструкций, например нефтяных трубопроводов. Чаще всего торпедообразные аппараты являются автономными.
Примером торпедообразного аппарата может служить автономный НПА «Клавесин» (рис. 2), разработанный в Центральном конструкторском бюро морской техники «Рубин» совместно с Институтом проблем морских технологий Дальневосточного отделения РАН. Аппарат представляет собой глубоководный многоцелевой комплекс, оснащенный современными средствами автономной и гидроакустической навигации и связи, реконфигурируемой системой управления, целевой аппаратурой для выполнения поисково-обследовательских работ, съемки и картографирования морского дна.

Рис. 2. Автономный необитаемый подводный
аппарат «Клавесин»
Fig. 2. Autonomous unmanned underwater vehicle
Harpsichord
Автономный НПА прошел экспериментальные испытания в Японском море и Курильско-Камчатском глубоководном желобе, а также опытную эксплуатацию на континентальном шельфе
в Арктике.
Конструкция автономного НПА включает
несущую раму, движительный комплекс, контейнеры с аппаратурой и аккумуляторными батареями, дополнительное оборудование и блоки плавучести. Энергетическая установка – электрические двигатели с аккумуляторными батареями. Основные характеристики аппарата: длина – 6,5 м; диаметр – 1 м; масса – 3,7 т. Максимальная глубина погружения – 6 000 м. Максимальная дальность хода составляет около 50 км [13, 14].
Примером аппарата цилиндрической, но не круглой формы, может служить автономный НПА Echo Voyager (рис. 3), разработанный компанией Boeing.

Рис. 3. Автономный необитаемый подводный аппарат Echo Voyager
Fig. 3. Autonomous unmanned underwater vehicle
Echo Voyager
Подводный аппарат Echo Voyager – самый длинный из разработанных ранее. Его длина составляет 15 м. Назначение аппарата – сбор информации в военных и научных целях. Аппарат имеет значительную автономность – до нескольких месяцев, чего удалось достичь при помощи гибридной перезаряжаемой энергетической установки. Для запуска Echo Voyager не нужно судно. На задание аппарат можно отправить прямо с места базирования. При необходимости передачи информации аппарат самостоятельно поднимается на поверхность. Кроме того, аппарат может самостоятельно возвращаться на место дислокации. Таким образом, упрощается его обслуживание: нет необходимости в судне-носителе или судне сопровождения [15, 16]. На аппарате предусмотрен большой грузовой отсек для хранения необходимого оборудования.
Аппараты цилиндрической формы, как правило, не являются универсальными. Их переоснащение «на месте» не всегда возможно по причине неподходящих массовых или габаритных характеристик новых компонентов. В настоящее время известны варианты блочной компоновки торпедообразных подводных аппаратов, позволяющих частично решить эту проблему. Одним из таких вариантов является автономный необитаемый подводный аппарат Gavia исландской фирмы Hafmynd (рис. 4). Первый опытный образец был построен
в 1997 г. Аппарат имеет блочную конструкцию, позволяющую оперативно производить необходимые изменения конфигурации аппарата.
В настоящее время разработаны блоки для решения самых разных задач в военной, коммерческой и научной сфере. Аппарат может нести множество датчиков и таможенных модулей полезного груза, которые делают его идеально подходящим для широкого круга исследований, контроля или наблюдения. Его модульная конструкция предоставляет возможность быстрой замены аккумуляторной батарей, что повышает мобильность аппарата.

Рис. 4. Автономный необитаемый подводный аппарат Gavia
Fig. 4. Autonomous unmanned underwater vehicle Gavia
Основными преимуществами аппарата Gavia являются достаточно высокая маневренность для аппарата своего класса, производство работ на глубинах до 2 000 м, эксплуатационная простота, большая производительность.
На рис. 5 представлен разобранный на блоки подводный аппарат Gavia в базовой конфигурации.

Рис. 5. Модульная система аппарата Gavia
Fig. 5. Modular system of apparatus Gavia
Основные характеристики аппарата Gavia в базовой конфигурации: длина – 1,8 м; диаметр – 0,2 м; вес в воздухе – 49 кг; рабочая глубина – до 1 000 м; максимальная скорость – до 5,5 уз; автономность – до 6 ч. Средства связи: беспроводная локальная вычислительная сеть (Wi-Fi) с дальностью действия
до 300 м, система спутниковой связи. Гидроакустическая система связи – отслеживание координат аппарата, получения статусных сообщений системы, дальность действия – до 1 200 м. Навигационный комплекс: приемник – система повышения точности сигналов (DGPS); трехосевой индукционный компас, датчик ориентации с углом охвата 360°, датчики ускорений; инерционная навигационная система с доплеровским лагом; гидроакустическая навигационная система [7, 17].
Существуют и российские аналоги аппарата Gavia. Например, поисково-исследовательский аппарат «Концепт-М» (рис. 6) группы компаний «Тетис Про», созданный в рамках программы импортозамещения. Аппарат способен погружаться на глубину до 1 000 м. Как и Gavia, «Концепт-М» является модульным аппаратом. На нем можно оперативно менять состав оборудования в соответствии с требованиями производимых операций [18].

Рис. 6. Автономный необитаемый подводный
аппарат «Концепт-М»
Fig. 6. Autonomous unmanned underwater
vehicle Concept-M
Другим видом автономных НПА торпедообразной формы являются подводные планеры, или глайдеры. Глайдеры приводятся в движение за счет изменения плавучести и угла дифферента. Изменение плавучести производится за счет приема или откачки забортной воды, а изменение угла дифферента – за счет изменения положения аккумуляторных батарей по длине аппарата.
Когда глайдер имеет положительную плавучесть и дифферент на корму, он начинает всплывать на поверхность; когда аппарат имеет отрицательную плавучесть и дифферент на нос, он уходит на глубину. Продольная составляющая подъемной силы, возникающей на корпусе и крыльях глайдера, дает ему возможность продольного перемещения в толще воды.
Указанный принцип движения позволяет резко сократить расход энергии, что, в свою очередь, позволяет принципиально увеличить дальность плавания, хотя и с небольшой скоростью. В конце XX в. были созданы глайдеры с дальностью автономного плавания в тысячи километров.
Скорость перемещения глайдера достаточно низкая и зависит от предельных значений колебания веса. К примеру, у аппарата Slocum Electric (рис. 7) водоизмещением 0,05 т, коэффициентом лобового сопротивления тела Cx порядка 3,5
и вариацией массы на 250 г (доля массы аппарата, используемая для измерения плавучести,
dm = 0,25 / 50 = 0,005) реальная скорость продольного хода колеблется около 0,27 м/с.
Глайдеры применяются в научных и коммерческих исследованиях океана, военном деле с начала 2000-х гг. [19].

Рис. 7. Глайдер Slocum Electric
Fig. 7. Glider Slocum Electric
Аппараты хорошо обтекаемой нецилиндрической формы. К этой группе аппаратов были отнесены аппараты без цилиндрической вставки, чаще сплюснутой формы, а также многокорпусные аппараты. Отношение длины к диаметру таких аппаратов меняется в пределах от 3 до 10. В качестве движителей и подруливающих устройств используются гребные винты в насадках или тоннелях. Количество движителей варьируется от 1 до 8.
Аппараты хорошо обтекаемой нецилиндрической формы более универсальны в плане переоборудования «на месте». В некоторых случаях навесное оборудование, например манипулятор, частично или полностью выносится за пределы корпуса. К аппаратам этой группы можно отнести аппараты достаточно широкого спектра применения: легкие рабочие аппараты, осмотровые аппараты, аппараты для мониторинга трубопроводов, гидрографические. Например, для выполнения гидрографических работ могут быть использованы телеуправляемые НПА. Как правило, такие аппараты используют на гидрографических катерах и других типах судов, целью которых является проведение исследовательских работ для получения детальной информации о ситуации на водных объектах.
На рис. 8 и 9 представлены два возможных компоновочных решения осмотровых аппаратов класса «микро» и «мини», представляющих собой движущиеся камеры с минимальным набором дополнительного оборудования.

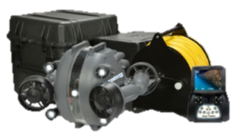
Рис. 8. Осмотровые аппараты класса «микро»
Fig. 8. Examination crafts of the class “micro”


|
а |
|
б |
Рис. 9. Осмотровые аппараты класса «мини»:
а – Video Ray MSS 6X300; б – Voyager
Fig. 9. Examination class crafts of the class “mini”:
a – Video Ray MSS 6X300; б – Voyager
В отличие от торпедообразных аппаратов, у аппаратов нецилиндрической формы встречается больше различных компоновочных решений. Одним из примеров аппарата хорошо обтекаемой формы может служить многоцелевой автономный НПА Thunderfish фирмы Kraken Robotics (рис. 10).

Рис. 10. Автономный необитаемый подводный
аппарат Thunderfish
Fig. 10. Autonomous unmanned underwater
vehicle Thunderfish
Аппарат Thunderfish представляет собой платформу, оборудованную двумя маршевыми двигателями, расположенными в кормовой оконечности, и четырьмя вертикальными подруливающими устройствами туннельного типа. Платформа способна нести полезную нагрузку до 75 кг. Груз крепится к нижней части корпуса аппарата.
Подводный аппарат изготавливается в двух модификациях: для глубины погружения 1 000 или
6 000 м. Аппарат оснащен самыми современными сенсорными системами, включая гидролокатор
и лазерный 3D-сканер. Набор бортовой аппаратуры включает гидролокаторы предотвращения препятствий, многолучевой эхолот и усовершенствованные датчики навигации или позиционирования.
Характеристики аппарата: длина – 3,5 м; ширина – 0,95 м; высота – 0,5 м. Вес без аккумуляторных батарей составляет 675 кг [7, 20].
Компания из Хьюстона совместно с военно-морским флотом США работает над автономным НПА-трансформером (рис. 11) с минимальным уровнем управления, который будет функционировать на глубинах более 3 000 м без надводного судна или фала для связи.

|
б |
|
а |
Рис. 11. Автономный необитаемый подводный
аппарат-трансформер: а – в походном положении;
б – в рабочем положении
Fig. 11. Autonomous unmanned underwater vehicle-transformer: a – in the stowed position;
б – in working position
Другой особенностью этой системы является ее способность самостоятельно развертываться на расстоянии нескольких десятков километров от судна-носителя. При этом аппарат может контролироваться оператором по низкочастотному акустическому каналу связи [21].
Аппарат создается как средство борьбы с донными минами, а также для проведения диверсионных операций. Аппарат может быть запущен с удаленного района, а по завершении задания может самостоятельно вернуться в точку отправления.
Нехарактерная форма была предложена разработчиками Северо-Восточного университета США при проектировании подводного аппарата для изучения морей Арктики. Автономный НПА Seabed Popoki (рис. 12) создан специально для работы в ледовых условиях Крайнего Севера. Аппарат способен погружаться на более чем километровую глубину.
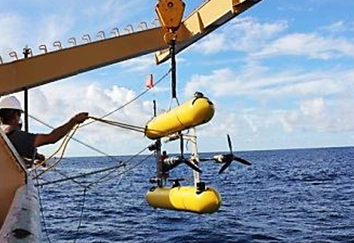
Рис. 12. Спуск автономного необитаемого подводного аппарата Seabed Popoki на сдаточных испытаниях
Fig. 12. Launching the autonomous underwater vehicle
Seabed Popoki at acceptance tests
Основные задачи подводного аппарата – проведение картографирования и измерения толщины ледяного панциря. Нестандартное компоновочное решение движительно-рулевого комплекса дает аппарату возможность точного позиционирования в толще воды и точного всплытия в ледяных колодцах на поверхность для последующего подъема на судно-носитель.
С роботом можно поддерживать связь по акустическому каналу, по которому передаются команды, например на экстренное всплытие. Управление подводным аппаратом осуществляется в автоматическом режиме по заранее установленной программе [22].
Аппараты хорошо обтекаемой бионической формы корпуса отличаются от рассмотренных выше аппаратов типом движителя. Мобильные подводные роботы бионического типа уже нашли применение в двух областях человеческой деятельности – военной и научно-исследовательской, где важны такие их свойства, как малошумность
и скрытность за счет мимикрии.
Благодаря хорошим обводам биороботы могут развивать большую скорость хода, а управление ими осуществляется с помощью движителя типа «машущее крыло».
В качестве примера можно привести осмотровый подводный аппарат SoFi (рис. 13), разработанный в Массачусетском технологическом институте. Идея разработки – создать подводного робота, который мог бы плавать вместе с другими рыбами,
не пугая их и не влияя на среду обитания, что поможет делать видеозаписи поведения практически любых морских обитателей на небольших глубинах.

Рис. 13. Осмотровый неавтономный подводный
аппарат SoFi
Fig. 13. Examination non-autonomous underwater
vehicle SoFi
Длина аппарата составляет 45 см, глубина погружения – несколько десятков метров, автономность – около часа. Аппарат изготовлен из силиконового каучука и ПВХ, детали корпуса были напечатаны на 3D-принтере.
Бесшумный механический хвост позволяет имитировать движения рыб и быструю смену направлений. Вдобавок на борту аппарата установлены сенсоры, позволяющие избегать столкновений с различными препятствиями [23, 24].
В настоящее время SoFi не является автономным подводным аппаратом. Искусственная рыба управляется аквалангистом беспроводным способом с расстояния 10–15 м.
Система управления подводным аппаратом. Система управления аппаратов как хорошо обтекаемой, так и плохо обтекаемой формы в подавляющем большинстве случаев представляет собой винтовой комплекс, включающий от 1 до 8 гребных винтов. Гребные винты могут быть оборудованы направляющими насадками или располагаться
в туннелях, подобно судовым подруливающим устройствам. Направляющие насадки могут быть стационарными или поворотными (рис. 14) [24].

Рис. 14. Гребной винт со стационарной насадкой для телеуправляемого необитаемого подводного аппарата
Fig. 14. Propeller with a stationary nozzle for
a remote-controlled unmanned underwater vehicle
Схема компоновки управляющего комплекса
и расположение оборудования для каждого аппарата индивидуальны. В случае аппаратов с открытой рамой при переоснащении аппарата «на месте» на раму могут быть установлены дополнительные винтовые комплексы для обеспечения нужных ходовых или маневренных характеристик.
Подводные аппараты хорошо обтекаемой формы оснащаются движительно-рулевыми комплексами самых разнообразных компоновок. Маршевые двигатели торпедообразных подводных аппаратов обычно располагаются в кормовой оконечности и представляют собой один или несколько гребных винтов: открытых или винтов в насадке.
На рис. 15 представлен автономный НПА Boeing Echo Voyager. Движительно-рулевой комплекс аппарата состоит из пятилопастного гребного винта и четырех поворотных стабилизаторов [16].

Рис. 15. Подводный аппарат Boeing Echo Voyager
Fig. 15. Submersible Boeing Echo Voyager
На рис. 16 проиллюстрирована кормовая оконечность подводного аппарата торпедообразной формы с гребным винтом внутри поворотной насадки.

Рис. 16. Гребной винт в поворачивающейся насадке
Fig. 16. Propeller in a rotating nozzle
Далее изображены многовинтовые варианты компоновки движительно-рулевого комплекса: на рис. 17 – подводный аппарат с двумя гребными винтами в поворотных насадках (для улучшения характеристик управляемости аппарата комплекс дополнен четырьмя вертикальными и четырьмя горизонтальными поворотными стабилизаторами); на рис. 18 – кормовая оконечность подводного аппарата с четырьмя гребными винтами.
Изображенный движительно-рулевой комплекс включает четыре свободных гребных винта, расположенных между Х-образно закрепленных стабилизаторов. Гребные винты расположены под углом около 22,5° к продольной оси симметрии аппарата.
При прямолинейном движении аппарата все четыре гребных винта работают с одинаковой тягой. Разворачивающий момент создается при изменении значения тяги на одном или нескольких гребных винтах.

Рис. 17. Кормовая оконечность двухвинтового
подводного аппарата
Fig. 17. Aft end of a twin-screw submersible

Рис. 18. Многовинтовые движительно-рулевые комплексы
Fig. 18. Multi-rotor propulsion and steering systems
Иногда подводные аппараты оснащаются подруливающими устройствами для более точного пространственного позиционирования, когда аппарат имеет малую скорость хода. На рис. 19 изображен подводный аппарат с вертикальными и горизонтальными подруливающими устройствами, расположенными в первой трети корпуса аппарата.
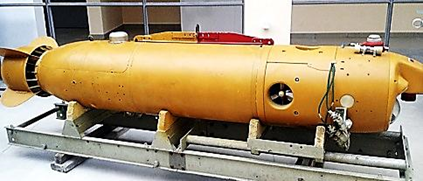
Рис. 19. Подруливающее устройство подводного
аппарата
Fig. 19. Thruster of an underwater vehicle
В кормовой оконечности этого аппарата расположен гребной винт внутри неподвижной насадки. Бионические подводные аппараты (рис. 20) оснащаются машущими движителями, моделирующими движения тел, конечностей и плавников живых существ: ракообразных, медуз, рыб или морских млекопитающих.
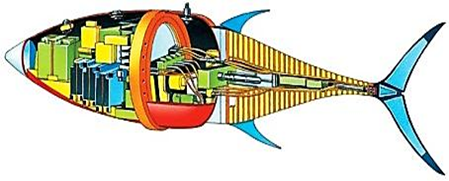
Рис. 20. Схематическое изображение привода
размахивания хвоста бионического подводного аппарата
Fig. 20. Diagram of the actuator waving the tail of a bionic underwater vehicle
Традиционные винторулевые комплексы устанавливаются на аппараты бионических форм
редко [7, 25, 26].
Заключение
В работе предложена классификация подводных аппаратов по форме корпуса: плохо обтекаемой формы, хорошо обтекаемой цилиндрической формы, хорошо обтекаемой нецилиндрической формы, хорошо обтекаемой бионической формы.
Применение НПА для проведения подводных работ позволяет решить широкий круг исследовательских задач. Развитие данного направления робототехники способствует появлению новых технологий и научно-исследовательских задач.
Необитаемые подводные аппараты обладают рядом преимуществ, но имеют и небольшие недостатки, связанные с конструкцией и формой аппаратов, которые могут накладывать некоторые ограничения на область применения НПА. Разработка и исследование НПА является перспективным направлением в робототехнике. Главными направлениями в развитии и создании НПА являются разработка и создание алгоритмов автоматического управления с применением методов искусственного интеллекта.
1. GOST P 56960 2016. Apparaty neobitaemye podvodnye. Klassifikaciya. M.: Standartinform, 2016. 7 s.
2. Avtonomnyy neobitaemyy podvodnyy apparat Iver2 / Oceanos. URL: https://oceanos.ru/AUV_Iver2_general (data obrascheniya: 05.07.2022).
3. Avtonomnyy neobitaemyy podvodnyy apparat MMT-3000 / IPMT DVO RAN. URL: http://www.imtp.febras.ru/razrabotki/69.html (data obrascheniya: 05.07.2022).
4. Avtonomnyy neobitaemyy podvodnyy apparat «Amulet» / CKB «RUBIN». URL: https://ckb-rubin.ru/proekty/robototekhnika/anpa_amulet/ (data obrascheniya: 05.07.2022).
5. Voytov D. V. Teleupravlyaemye neobitaemye podvodnye apparaty. M.: Morkniga, 2012. 504 s.
6. Zraev R. A. Neobitaemye podvodnye apparaty vchera, segodnya i zavtra // Molodoy uchenyy. 2016. № 26 (130). S. 37-39.
7. Kishkoreva S. S., Pestova A. E., Anikin A. V. Konstruirovanie bespilotnyh podvodnyh apparatov // Enisey. Arktika: sb. tr. konf. (Krasnoyarsk, 25 marta 2021 g.). Krasnoyarsk: Izd-vo SibGU im. M. F. Reshetneva, 2021. S. 22-24.
8. Lebedev A. O., Lebedeva M. P., Homyakov A. A. Gidrodinamicheskie harakteristiki konceptual'nogo podvodnogo apparata // Mor. intellektual. tehnologii. 2020. № 1-1. S. 11-17.
9. Pat. RF RU 192170 U1. Podvodnyy poiskovyy apparat / Lebedeva M. P., Lebedev A. O. № 2019117469; zayavl. 04.06.2019; opubl. 05.09.2019.
10. Nikulin Ya. S. Istoricheskiy podhod k analizu razvitiya avtonomnyh neobitaemyh podvodnyh apparatov // Istoricheskie, filosofskie, metodologicheskie problemy sovremennoy nauki: sb. st. IV Mezhdunar. nauch. konf. molodyh uchenyh (Kursk, 20 maya 2021 g.). Kursk: Universitet. kn., 2021. S. 52-56.
11. Lebedeva M. P., Lebedev A. O., Butsanets A. A. Justification for the body construction selection of the unmanned uninhabited underwater apparatus // TransNav: International Journal on Marine Navigation and Safety of Sea Transportation. 2018. V. 12. N. 4. P. 693-697.
12. Inzarcev A. V., Kiselev L. V., Kostenko V. V., Matvienko Yu. V., Pavin A. M., Scherbatyuk A. F. Podvodnye robototehnicheskie kompleksy: sistemy, tehnologii, primenenie. Vladivostok: Izd-vo IPMT DVO RAN, 2018. 368 s.
13. Luskin B. A., Semenov D. O., Zaharov A. I. Proektirovanie robototehnicheskih kompleksov v CKB MT «RUBIN» // Ekstrem. robototehnika. 2018. T. 1. № 1. S. 504-508.
14. Ispytaniya «Klavesina-2R-PM» podtverdili zalozhennye algoritmy // Voennoe obozrenie. URL: https://topwar.ru/159085-ispytanija-klavesina-2r-pm-podt-verdili-zalozhennye-algoritmy.html (data obrascheniya: 02.08.2022).
15. Doerti P., Uilson D. Chelovek + mashina. Novye principy raboty v epohu iskusstvennogo intellekta / per. s angl. O. Sivchenko, N. Yacyuk. M.: Mann, Ivanov i Ferber, 2019. 297 s.
16. Oficial'nyy sayt Boeing. URL: https://www.boeing.com/defense/autonomous-systems/echo-voyager/index.page (data obrascheniya: 01.08.2022).
17. Avtonomnyy neobitaemyy podvodnyy apparat GAVIA / Korabel. URL: https://www.korabel.ru/news/comments/avtonomniy_neobitaemiy_podvodniy_apparat_gavia_ot_kompanii_tetis_pro.html (data obrascheniya: 01.08.2022).
18. RoboTrends. URL: http://robotrends.ru/robopedia/koncept-m-rossiyskaya-versiya-gavia (data obrascheniya: 01.08.2022).
19. Lee J. H., Hyeon J.-W., Jung S.-K., Lee Y.-K. Ob-servations of Temperature and Salinity Mesoscale Variability off the East Coast of Korea using an Underwater Glider: Comparison with Ship CTD Survey Data // Journal of Coastal Research. 2020. V. 95. P. 1167-1171.
20. Oficial'nyy sayt Kraken. URL: https://krakenrobotics.com/ (data obrascheniya: 01.08.2022).
21. IEEE Spectrum. URL: https://spectrum.ieee.org/meet-aquanaut-the-underwater-transformer (data obrascheniya: 01.08.2022).
22. Nautilius Live Ocean Exploration Trust. URL: https://nautiluslive.org/blog/2017/09/01/our-ships-cat-meet-auv-popoki (data obrascheniya: 01.08.2022).
23. Filatov A. L. Obzor suschestvuyuschih podhodov k postroeniyu bionicheskih podvodnyh robotov // Tehn. problemy osvoeniya Mirovogo okeana. 2019. № 8. S. 167-172.
24. Martynova L. A., Rozengauz M. B. Podhod k rekonfiguracii sistemy upravleniya dvizheniem avtonomnogo neobitaemogo podvodnogo apparata // Giroskopiya i navigaciya. 2020. T. 28. № 2 (109). S. 131-146.
25. Oficial'nyy sayt «Tetis Pro». URL: https://www.tetis-pro.ru/faq/8028/ (data obrascheniya: 01.08.2022).
26. Budaev D. D. Analiz suschestvuyuschih razrabotok podvodnyh robotov tipa ugor' // Molodezh' i nauka: shag k uspehu: sb. tr. konf. (Kursk, 22-23 marta 2022 g.). Kursk: Izd-vo YuZGU, 2022. S. 245-248.
