












Россия
Россия
Россия
Исследуется разработанная компьютерная система для точного расчета параметров морского волнения и оценки потерь скорости судна. Актуальность исследования обусловлена необходимостью повышения безопасности мореплавания в условиях меняющегося климата, приводящего к усилению штормов, и выбора комплексного подхода к измерению параметров волнения. Разработанная система интегрирует данные о погоде с внешних API-сервисов (например, Stormglass.io) с введенными параметрами судна, позволяя рассчитывать ключевые характеристики волн и прогнозировать потерю скорости. Особое внимание уделяется расчету высоты волны 3 % обеспеченности и применению формулы П. М. Хохлова для определения влияния волнения на ходовые качества судна. Система предоставляет судоводителям и морским инженерам инструмент для оперативного принятия решений, обеспечивая более безопасное и экономичное судовождение, с потенциалом дальнейшей интеграции в мостиковые системы. Разработанное программное решение представляет собой модульный инструмент, состоящий из блоков ручного ввода данных и автоматических расчетов. Его функционал включает получение актуальных метеоданных по заданным координатам, расчет волновых параметров (длины, скорости, крутизны, амплитуды, энергии волны) и классификацию глубины воды. Критически важным элементом является алгоритм оценки экстремальных условий через высоту волны 3 % обеспеченности (h3%). В основе прогноза потери скорости лежит формула П. М. Хохлова, учитывающая курсовой угол волны, водоизмещение судна и его скорость на тихой воде. Практическая ценность системы подтверждается возможностью ее применения для оптимизации маршрутов, планирования рейсов и проведения инженерных расчетов, что напрямую способствует минимизации навигационных рисков и эксплуатационных издержек в условиях нестабильной гидрометеорологической обстановки.
потеря скорости судна, волновые параметры, API параметров прогноза, безопасность мореплавания, система
Введение
Использование современных измерительных комплексов, включающих средства дистанционного зондирования, акустические датчики и беспилотные летательные аппараты, обеспечивает высокую точность и оперативность получения метеоданных. Доступ к информации в реальном масштабе времени служит основой для улучшения качества гидрометеорологических прогнозов и оптимизации алгоритмов управления судами по фиксированным маршрутам.
Курс судна в океане постоянно корректируется с учетом внешних факторов: волн, ветра и течений. Морские волны вызывают непредсказуемые опасности при следовании курса. Для безопасного судоходства приходится отслеживать параметры погодных условий.
Задача оптимального судовождения, обеспечивающего безопасность плавания, представляет собой актуальную проблему морской навигации. Компетенция судоводителя играет критическую роль в решении этой задачи, однако даже высококвалифицированные специалисты не всегда способны заблаговременно идентифицировать потенциально опасные гидрометеорологические условия и навигационные риски [1].
Штормовое волнение создает риски для безопасности судна: смещение груза из-за качки способно вызвать крен и в крайних случаях опрокидывание. Влияние ветра и высоты волн напрямую сказывается на управляемости – при достижении определенных порогов судно может стать неуправляемым. Обоснованный выбор курса возможен только при наличии у судоводителя актуальных данных о погодных условиях.
Исследование направлено на решение проблемы повышения точности и надежности измерений параметров волнения. Ключевым аспектом является разработка комплексных систем, интегрирующих современные технологии сбора данных и обеспечивающих их эффективный анализ в различных эксплуатационных условиях.
Постановка задачи
Цель настоящей работы заключается в разработке эффективной системы измерения параметров морских волн, оценке их влияния на безопасность мореплавания.
Для достижения поставленной цели необходимо решить следующие задачи:
– провести анализ существующих методов измерения параметров волнения;
– разработать новые алгоритмы обработки данных;
– выполнить модельные испытания предложенной системы.
Теоретико-методологическую основу исследования составляют современные положения физики [2], методы математического моделирования и цифровой обработки сигналов, применение которых обеспечит создание надежного высокотехнологичного измерительного комплекса.
Для судоводителя море – это динамичная и зачастую враждебная среда, где ключевую роль играет волнение [3]. Точное определение его параметров – высоты, периода, длины и направления – является краеугольным камнем навигационной безопасности, сохранности груза и экономической эффективности судоходства. Эволюция методов его оценки прошла путь от субъективного опыта до высокоточных технологических решений.
Исторически первым и до сих пор обязательным методом остаются стандартизированные визуальные наблюдения. Однако человеческое восприятие ограничено и субъективно, особенно в условиях шторма или в темное время суток. Качественный скачок обеспечили контактные методы, в частности бортовые инерциальные измерительные системы, волнографы и контактные вехи. Они непрерывно регистрируют качку, а специальные алгоритмы, используя частотные характеристики корпуса, решают обратную задачу динамики: по реакции судна вычисляют параметры волнения, которое эту реакцию вызвало [4]. Это позволяет получать данные в реальном времени, непосредственно для акватории, где находится судно. Дистанционные методы, включая радиолокационный анализ морской поверхности и спутниковую альтиметрию, обеспечивают стратегический обзор волновой обстановки. Судовые радиолокационные станции в волнометрическом режиме способны детектировать зоны интенсивного волнения на расстоянии до нескольких миль, в то время как спутниковые системы предоставляют глобальную картину распределения волновых полей [5].
В современных условиях наиболее актуальной становится задача интегрирования системы мониторинга, объединения традиционных методов с цифровыми платформами. Именно комплексный подход, синтезирующий данные бортовых систем, спутникового мониторинга и прогностических алгоритмов в едином информационном пространстве, позволяет перейти от реактивного управления к проактивному.
Функционал разработанной системы обеспечивает сбор и обработку данных о параметрах морского волнения и ветровом режиме в заданной точке Мирового океана, определяемой пользователем путем ввода географических координат (широты и долготы). Ключевой особенностью системы является учет влияния волновых характеристик на скорость судна [6]. Информационное наполнение реализовано посредством интеграции с API сервиса Stormglass.io, что позволяет получать актуальные метеорологические данные, включая высоту волн, их направление и период.
Сервис Stormglass.io
В контексте решения задач эксплуатации транспорта Stormglass.io является источником достоверной гидрометеорологической информации, специализирующимся на морской тематике. Сервис предоставляет точные прогностические данные о волновом режиме, ветровой обстановке, температуре воды и других параметрах, критически важных для обеспечения безопасности мореплавания. Для интеграции в сторонние приложения и системы предусмотрен API-интерфейс, требующий аутентификации по уникальному ключу доступа и оформления соответствующей подписки. Программный интерфейс позволяет осуществлять выборку данных по заданным координатам, временным диапазонам и типам измерений, с использованием библиотеки tkinter и requests на Python, что делает его эффективным инструментом для разработки специализированного навигационного программного оборудования.
Структура системы
Изначально систему можно представить как черный ящик (рис. 1) с входными параметрами для расчета потери скорости судна.

Рис. 1. Система, представленная в виде черного ящика
Fig. 1. A system presented as a black box
На вход компьютерной программы отправляются параметры, как отображено на рис. 1, местоположение, данные о погоде, данные о судне. Соответственно, на выходе данной компьютерной программы мы находим потерю скорости судна.
Структура системы (рис. 2) состоит из модулей, решающих задачи:
– импорты библиотек;
– константы;
– функции;
– графический интерфейс.
Реализованная модульная архитектура обеспечивает гибкость, масштабируемость и прозрачность программного кода, что существенно упрощает процедуры последующей доработки и сопровождения системы. В структуре комплекса выделены два основных функциональных модуля: блок ввода исходных данных, необходимых для проведения расчетов, и модуль автоматического выполнения вычислительных операций.
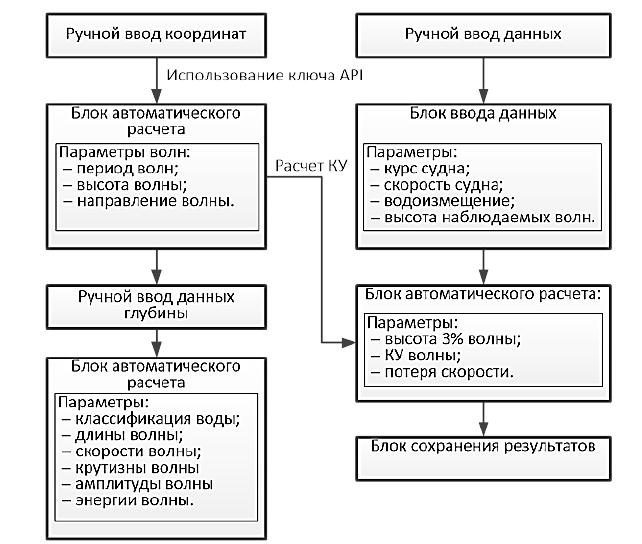
Рис. 2. Структура использования системы: КУ – курсовой угол
Fig. 2. System usage structure: КУ – the heading angle
Регламент работы с системой предполагает следующую последовательность действий пользователя:
1. Пользователь задает географические координаты района плавания (широту и долготу) и активирует функцию получения данных нажатием кнопки «Получить». Система выполняет запрос к внешнему источнику, после чего отображает в интерфейсе актуальные параметры ветрового режима и параметры волн.
2. Выполняется ввод глубины воды, после чего нажимается кнопка «Расчет параметров волны». Система рассчитывает длину волны, классификацию глубины воды, скорость волны, крутизну волны, амплитуду и энергию волны.
3. Вводятся исходные данные и запускается процедура расчета высоты волны 3 % обеспеченности (h3%). Данный параметр представляет собой статистическую величину, превышаемую лишь 3 % волн в наблюдаемом районе за фиксированный промежуток времени. Показатель h3% характеризует экстремальные гидрометеорологические условия и используется при оценке прочности корпуса и остойчивости судна в штормовых условиях.
4. Вводится курс судна, значение начальной скорости и водоизмещение, затем активируется расчет фактической скорости нажатием кнопки «Расчет V». Система отображает итоговые значения КУ волны, курса и скорости судна с учетом возможных потерь хода, обусловленных воздействием волнения.
5. Все рассчитанные параметры сохраняются в текстовый файл по кнопке «Сохранить».
Разработанная система ориентирована на широкий круг специалистов морской отрасли, включая судоводительский состав, корабельных инженеров и научных сотрудников, занимающихся изучением гидрометеорологических процессов. Применение данного программного комплекса позволяет в оперативном режиме выполнять сбор и интерпретацию данных о ветровом режиме и волнении, а также производить расчет ключевых параметров, значимых для обеспечения безопасности плавания и решения задач проектирования морских судов.
Логика работы системы
1. Гидродинамический блок: система автоматически определяет длину, скорость и энергию волны. Классификация глубины позволяет уточнить расчетные модели в зависимости от прибрежных или океанических условий.
2. Блок экстремальных значений: через интерфейс ввода передается массив данных о высоте волн. Система аккумулирует значения и выводит расчетную высоту h3%.
Алгоритм расчета высоты волны 3 % обеспеченности:
– пользователь вводит данные о высотах волн (через запятую);
– система сортирует данные и вычисляет высоту волны 3 % обеспеченности (h3%), которая используется в морской инженерии для оценки экстремальных условий.
3. Навигационный блок: для оценки эффективности перехода рассчитывается ветро-волновое сопротивление. Вводятся эксплуатационные параметры (водоизмещение, текущий курс, паспортная скорость V0).
Расчет снижения скорости производится по формуле П. М. Хохлова [7]:
![]()
где:
– учет эталонного судна: вычисляется базовая потеря скорости: 
– масштабный коэффициент: применяется поправка  учитывающая инерционность реального судна через его водоизмещение и начальную скорость.
учитывающая инерционность реального судна через его водоизмещение и начальную скорость.
Формула П. М. Хохлова в коде:
Vp = V0 – (0,745h – 0,275qh)(1 – 1,35 · 10–6DV0),
где h – высота волн 3 % обеспеченности, м; q – КУ волны, рад; D – водоизмещение судна, т; V0 – скорость судна на тихой воде, уз.
Коэффициенты 0,745 и 0,275 связаны с влиянием высоты волны и КУ волны на потерю скорости: 0,745 – коэффициент, который определяет влияние высоты волны на потерю скорости (чем выше волна, тем больше потеря скорости); 0,275 – коэффициент, который учитывает влияние КУ волны (чем больше угол между курсом судна и направлением волны, тем больше потеря скорости).
Коэффициенты были получены эмпирически на основе экспериментальных данных и наблюдений за поведением судов на волнении.
GUI системы
Ниже приведен интерфейс системы для двух судов (рис. 3), параметры которых взяты из [8] (рис. 4).
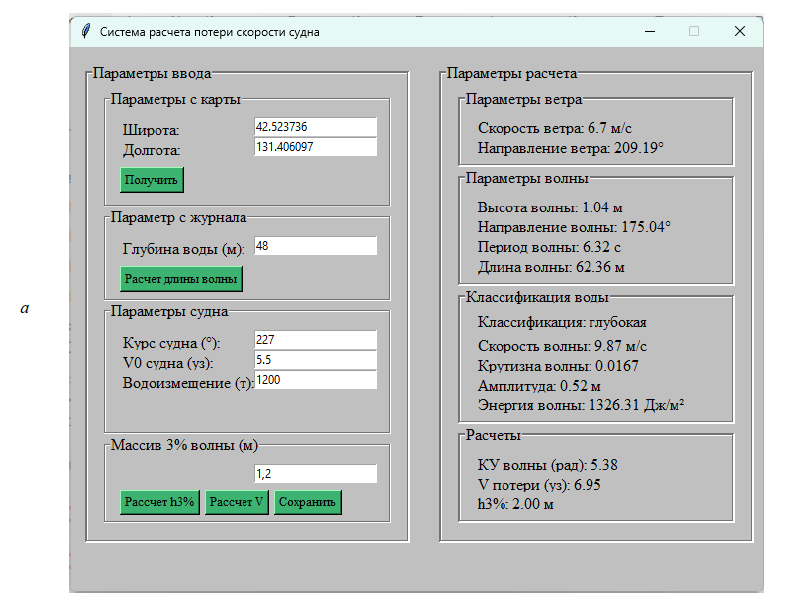
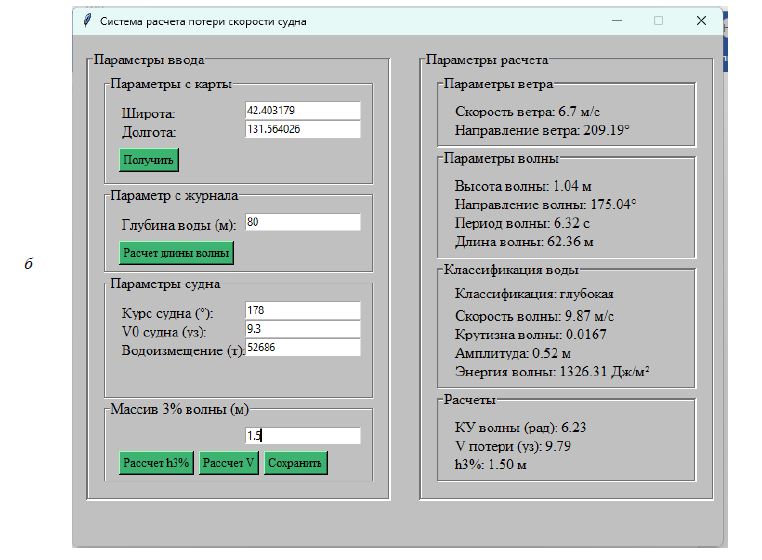
Рис. 3. Расчетные показатели для судна: а – «Беринг»; б – HE SHUN AN
Fig. 3. Design parameters for the vessel: a – “Bering”; б – HE SHUN AN
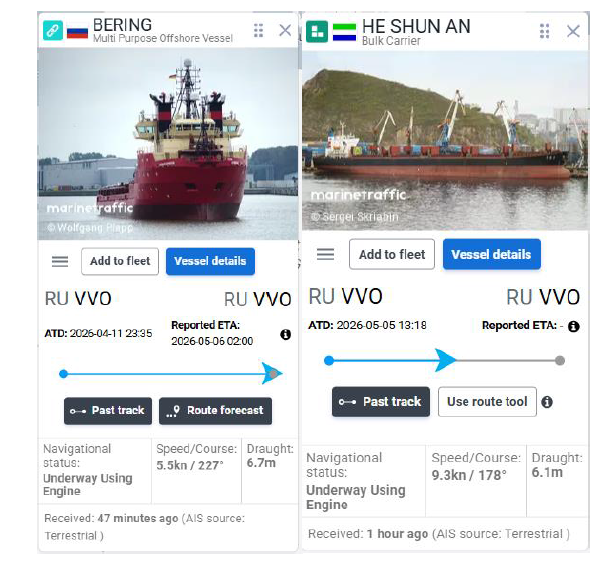
Рис. 4. Параметры судов [8]
Fig. 4. Ship parameters [8]
Экспортирование данных
Пользователь может экспортировать и сохранить все полученные и рассчитанные данные в файл (таблица).
Показатели для двух судов, сохраненные в файлы системы
Indicators for two vessels saved in the system files
|
Параметр |
Значение |
|
|
«Беринг» |
HE SHUN AN |
|
|
Широта |
42,523736 |
42,403179 |
|
Долгота |
131,406097 |
131,564026 |
|
Глубина воды, м |
48 |
80 |
|
Курс судна, град |
227 |
178 |
|
V0 судна, уз |
5,5 |
9,3 |
|
Водоизмещение, т |
1 200 |
52 686 |
|
Высота волны, м |
1,04 |
1,04 |
|
Направление волны, град |
175,04 |
175,04 |
|
Период волны, с |
6,32 |
6,32 |
|
Скорость ветра, м/с |
6,7 |
6,7 |
|
Направление ветра, град |
209,19 |
209,19 |
|
КУ волны, рад |
5,38 |
6,23 |
|
V потери, уз |
6,95 |
9,79 |
|
3 % волны, м |
2,00 |
1,50 |
|
Длина волны, м |
62,36 |
62,36 |
|
Классификация воды |
Глубокая |
Глубокая |
|
Скорость волны, м/с |
9,87 |
9,87 |
|
Крутизна волны |
0,0167 |
0,0167 |
|
Амплитуда, м |
0,52 |
0,52 |
|
Энергия волны, Дж/м² |
1 326,31 |
1 326,31 |
Заключение
В результате проведенного исследования и практической реализации программного комплекса сформулированы следующие положения:
1. Эргономичность и прикладная значимость. Разработанная система отличается высоким уровнем пользовательского удобства и наглядностью расчетных данных.
2. Эргономичный дизайн интерфейса способствует быстрому проведению расчетов, результаты которых напрямую влияют на повышение уровня безопасности мореплавания и качество управления судном.
3. Сфера практической реализации. Выводы и инструменты, полученные в рамках работы, имеют прикладное значение для метеорологического мониторинга, океанографического обеспечения и инженерных задач, связанных с проектированием и эксплуатацией морских объектов.
4. Векторы развития. Дальнейшая модернизация системы предполагает интеграцию модулей для анализа ледовой обстановки, учета течений и уточнения алгоритмов оценки потерь скорости под воздействием ветра и волнения. Важным направлением станет сопряжение программного комплекса с судовыми датчиками и мостиковыми навигационными системами.
В целом проведенное исследование подтверждает актуальность автоматизации процессов анализа внешней среды для нужд современного судовождения.
1. Васильев К. П. Что должен знать судоводитель о картах погоды и состояния моря. Ленинград: Гидрометеоиздат, 1980. 231 с.
2. Giordano N. College Physics: Reasoning and Relationships. Cengage Learning, 2009. P. 421–424.
3. Бурханов М. В. Справочник штурмана. М.: Моркнига, 2008. 560 с.
4. Чижиумов С. Д. Основы гидродинамики: учеб. пособие. Комсомольск-на-Амуре: Изд-во КнАГТУ, 2007. 106 с.
5. Глухов В. Г., Гордиенко А. И., Шаронов А. Ю., Шматков В. А. Гидрометеорологическое обеспечение мореплавания. СПб.: Свое изд-во, 2014. 406 с.
6. Бояринов А. М., Ершов А. А., Пылаев С. М. Анализ применимости формул расчета ветро-волновых потерь скорости хода морских судов // Вестн. Гос. ун-та мор. и реч. флота им. адм. С. О. Макарова. 2017. Т. 9. № 6. С. 1168–1174. DOIhttps://doi.org/10.21821/2309-5180-2017-9-6-1168-1174.
7. Лубковский В. К. Определение ветро-волновых потерь скорости судов смешанного плавания с измерением параметров волнения ортогонально-линеечным волномером: дис. … канд. техн. наук. Новосибирск, 2009. 177 с.
8. Информация в реальном времени о движении судов и их текущем местоположении в гаванях и портах. URL: https://www.marinetraffic.com (дата обращения: 10.01.2026).
