









Россия
Целью данной работы является разработка и обоснование модификации обобщенного метода Галёркина для решения задачи параметрического синтеза нелинейных систем автоматического управления (САУ). Традиционные методы, ориентированные на линейные системы, демонстрируют недостаточную эф-фективность при учете существенных нелинейностей, что негативно сказывается на динамических свойствах управляемых объектов. Уделяется внимание выбору способа аппроксимации нелинейных характеристик, где предпочтение отдается полиномиальной аппроксимации, обеспечивающей более точную математическую модель по сравнению с кусочно-линейной аппроксимацией. Повышение степени полинома позволяет достичь лучшего соответствия между создаваемой моделью и реальными характеристиками системы. Предлагается алгоритм минимизации целевой функции, учитывающей нелинейные свойства и физические ограничения систем. Получены рекуррентные соотношения интегралов Галёркина, играющих ключевую роль в определении коэффициентов, влияющих на динамику системы. Метод применим как к непрерывным, так и к импульсным САУ, включая многосвязные системы, что значительно расширяет сферу его практического использования. Разработан алгоритм реализации метода, представленный в виде наглядной блок-схемы, включающей этапы ввода исходных данных, преобразования нормализованных параметров в реальные величины, расчета коэффициентов дифференциальных уравнений, проверки устойчивости системы и оценки эффективности решения посредством вычисления целевого функционала. Таким образом, модификация метода Галёркина совместно с полиномиальной аппроксимацией нелинейных характеристик открывает значительные перспективы для улучшения качества и надежности управления различными промышленными объектами. Полученные результаты подтверждают широкие возможности применения предложенного метода как для непрерывных, так и для импульсных САУ.
обобщенный метод Галёркина, нелинейные системы автоматического управления, рекуррентные соотношения, полиномиальная аппроксимация
Введение
В современном мире широкое распространение получают сложные системы автоматического управления (САУ), обладающие нелинейными свойствами, которые обусловлены особенностями технологического оборудования, физическими явлениями и т. п. [1–3]. Ввиду возрастающей сложности технологических процессов становится очевидной потребность в развитии методов синтеза нелинейных САУ, позволяющих с единых алгоритмических, математических и методологических подходов гарантировать высокое качество управления при наличии существенных нелинейностей. Традиционные подходы, ориентированные преимущественно на линейные САУ, не позволяют решать задачу параметрического синтеза, поскольку не обеспечивают необходимой точности синтезированных параметров, что приводит к ухудшению динамических свойств САУ [1–5]. Таким образом, важнейшей задачей становится разработка методов параметрического синтеза, учитывающих особенности нелинейных элементов. Учитывая, что объектом исследования выступают САУ, содержащие нелинейные элементы, процедура синтеза законов управления неразрывно связана с выбором способа аппроксимации нелинейных характеристик. Поскольку отсутствуют универсальные подходы к параметрическому синтезу, необходимо принимать во внимание специфику рабочих режимов конкретной системы, т. е. необходимо составить адекватную математическую модель, что связано с выбором метода аппроксимации [5–8]. Наибольшее распространение получила кусочно-линейная аппроксимация, однако ее точность не всегда достаточна для формирования полноценной математической модели.
Постановка задачи
В работе рассматривается класс нелинейных САУ (как непрерывных, так и импульсных, включая многосвязные), динамика которых описывается дифференциальными уравнениями произвольного порядка, содержащими статические нелинейные элементы, гладкими или кусочно-гладкими нелинейными характеристиками произвольной формы, допускающими равномерную полиномиальную аппроксимацию на рабочем диапазоне изменения входного сигнала нелинейного элемента.
Целью исследования являются разработка и обоснование модификации обобщенного метода Галёркина, позволяющей решать задачу параметрического синтеза законов управления (определения оптимальных значений настраиваемых параметров регулятора) для указанного класса нелинейных САУ путем минимизации интегрального квадратичного критерия качества при заданном программном движении и внешнем воздействии, с обязательным учетом физических ограничений на параметры и гарантированием устойчивости замкнутой системы. В качестве основного способа представления нелинейностей принимается полиномиальная аппроксимация произвольной степени (вместо традиционной кусочно-линейной), что обеспечивает более высокую точность математической модели и дает возможность аналитически вычислить необходимые интегралы Галёркина через полученные в работе рекуррентные соотношения.
Математический аппарат
Запись аппроксимирующего полинома имеет следующий вид:
![]()
где x – входной сигнал; y – выходной сигнал; a – коэффициенты полинома.
В качестве основного математического инструмента предлагается использовать обобщенный метод Галёркина. Данный подход позволяет синтезировать законы управления для различных классов систем, включая как непрерывные САУ, так и системы с множеством разновидностей модулированных сигналов. Важно отметить, что данный подход применяется для решения задач параметрического синтеза в системах, динамика которых описывается как простыми линейными, так и сложными нелинейными дифференциальными уравнениями любого порядка. Подробное описание общей схемы решения представлено в [9], поэтому остановимся на модификации метода к новому классу рекуррентных соотношений, аппроксимирующих нелинейные характеристики.
Задача нахождения параметров с применением обобщенного метода Галёркина является задачей нелинейного программирования. Ее целью выступает минимизация целевой функции вида
 (1)
(1)
где n, u, v – степени полиномов; ai, bi, ei – вещественные постоянные коэффициенты полиномов оператора обобщенного дифференцирования D; Aqi, Bqi, Cqi – интегралы Галёркина вида
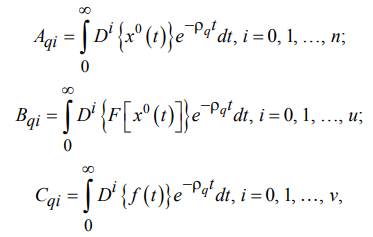
где Di – оператор обобщенного дифференцирования; x0(t) – желаемое программное движение на входе нелинейного элемента; F[x0(t)] – аппроксимированная полиномом нелинейная характеристика; f(t) – внешнее входное воздействие; – линейно-независимые координатные функции в виде ряда вещественных экспонент.
Искомыми функциями являются параметры управления, определяющие закон управления САУ. Минимизация функционала (1) обеспечивает синтез САУ, минимизируя отклонения от желаемого программного движения x0(t). Минимизация целевой функции осуществляется с учетом определенных технических условий, накладываемых на диапазоны изменения варьируемых параметров. Данные условия обеспечивают физическую осуществимость найденных решений, устойчивость САУ и заданную степень устойчивости относительно вариаций искомых параметров. Интегральные выражения Aqi и Cqi, отражающие динамические свойства системы, уже получены ранее применительно к различным видам программных движений и внешним воздействиям [10]. Чтобы расширить применение обобщенного метода Галёркина на новые классы нелинейных характеристик, аппроксимируемых элементарными функциями, необходимо определить значения интегралов Bqi на соответствующем семействе функций. Другими словами, для нахождения оптимального закона управления САУ при полиномиальной аппроксимации нелинейных характеристик требуется вычислить ин-
теграл вида

где g – показатель степени; zg – коэффициенты полинома
 ,
,
что представляет собой распространение принципа эквивалентных преобразований [5, 6] на нелинейные характеристики при их аналитической аппроксимации и существенно упрощает вычисление интегралов.
Опыт проектирования математических моделей систем управления с применением обобщенного метода Галёркина подтверждает, что оптимальным выбором для задания требуемого программного движения являются решения линейных дифференциальных уравнений второго порядка включительно [11]. Порядок этих уравнений, как правило, ниже, чем у реального дифференциального уравнения, описывающего динамику проектируемой системы. Подобное упрощение вполне обоснованно, поскольку цель заключается в синтезе системы, а не в ее точной идентификации
В процессе проектирования САУ особую значимость приобретают критерии оценки качества переходных режимов. Необходимо обеспечить четкое и однозначное соответствие между указанными кри-
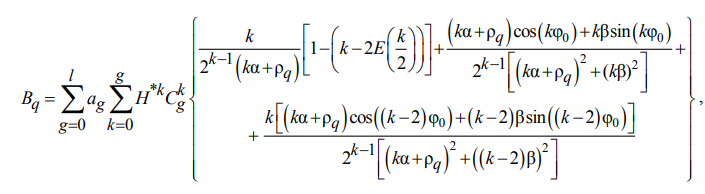
териями и ключевыми параметрами заданного динамического состояния, такими как коэффициент затухания, колебательность. Данное условие выполняется для линейных дифференциальных моделей первого и второго порядков. В результате вычислений получено

где соотношения, определяющие Bq, вычислены для процесса соответствующего записи уравнения движения системы относительно входа
![]() (2)
(2)
где H* – желаемое установившееся значение координаты системы; e–αt – затухающая экспонента; β – частота собственных колебаний; φ0 – начальная фаза; 1(t) – функция Хевисайда. и относительно сигнала ошибки
 (3)
(3)
где xy – значение желаемого процесса x0(t) при t →∞.
Получение общей формулы для соотношений, определяющих Bq применительно к процессам (2) и (3), представляет собой сложную задачу ввиду многообразия возможных конфигураций. Вследствие этого возникла необходимость проведения детальных численных расчетов для различных частных случаев [11, 12]. Были получены следующие обобщающие выражения для записи движения системы (2):
– четная степень:
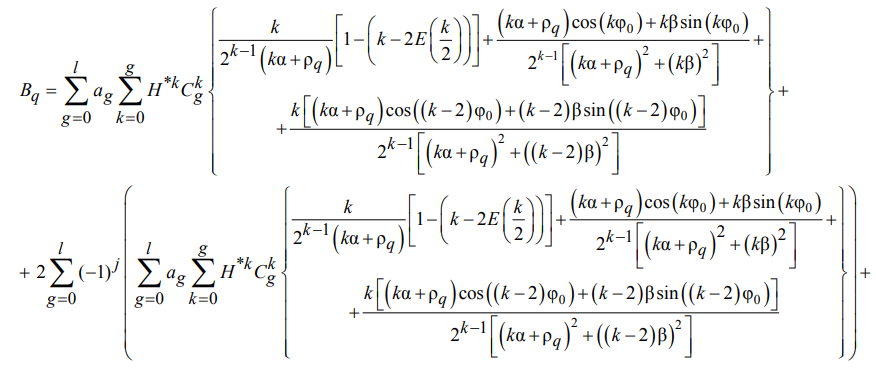
 (4)
(4)
– нечетная степень:
 (5)
(5)
где E – целая часть числа.
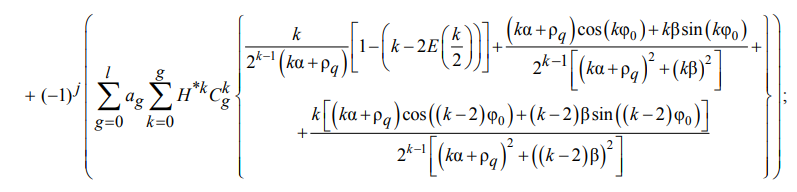
Выражения для записи движения системы (3):
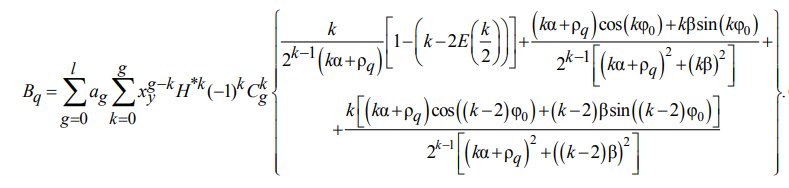 (6)
(6)
Общий вид обобщенного выражения для соотношений, определяющих Bq применительно к процессам (2) и (3), для импульсных САУ вычисления были представлены в [13].
Алгоритм, реализующий обобщенный метод Галёркина
На рис. 1 приведен алгоритм, позволяющий реализовать применение обобщенного метода Галёркина.
Шаги алгоритма:
1. Пользователь вводит необходимые исходные данные, после чего базовая программа NLS инициирует работу вспомогательного модуля SEARC, задачей которого является формирование начальных условий для предстоящего этапа оптимизации.
2. Оптимизационные расчеты начинаются с центральной точки многомерного пространства, размерность которого соответствует количеству настраиваемых параметров системы. Эта точка выбирается таким образом, чтобы равномерно охватывать возможные варианты решений.
3. Нормализованные значения варьируемых параметров (диапазон нормализации от 0 до 1) преобразуются модулем SEARC в их физические эквиваленты, соответствующие реальной физической модели исследуемой системы. Преобразованные значения направляются в специализированные вычислительные компоненты DIFUR и DDIF.
4. Подмодули DIFUR и DDIF выполняют расчет коэффициентов дифференциальных уравнений движения системы, учитывая наличие нелинейных характеристик, а также производят определение коэффициентов характеристического уравнения, необходимого для последующей оценки устойчивости синтезированной автоматической системы управления (САУ).
5. Вычисленные коэффициенты поступают в специализированный модуль RAUS/POPOV, выполняющий проверку устойчивости спроектированной системы управления с учетом текущих значений варьируемых параметров. Данный этап необходим для исключения потенциально опасных режимов работы системы.
6. В случае успешного прохождения теста на устойчивость управление передается модулю FUNC, отвечающему за оценку эффективности найденного решения посредством расчета целевого функционала.
7. Производится обращение к специальной функции WS, предназначенной для пошагового вычисления значения интегрального критерия оптимальности J (1) относительно текущего шага ρq и отдельно взятого нелинейного элемента системы.
8. Вывод ответа на экран.
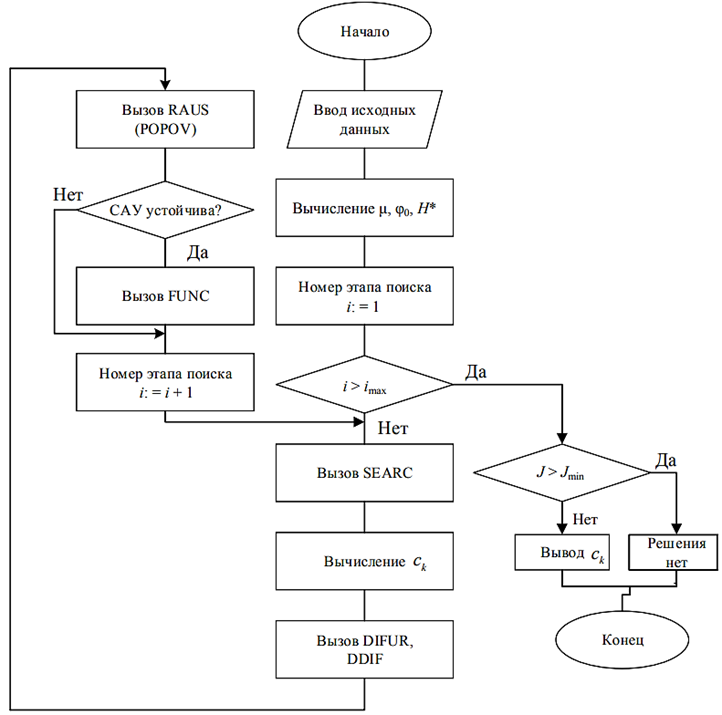
Рис. 1. Блок-схема алгоритма синтеза нелинейных непрерывных и нелинейных импульсных САУ
Fig. 1. Block diagram of the algorithm for synthesis of nonlinear continuous and nonlinear pulse control systems
На рис. 2 представлен алгоритм вычисления функционала J.
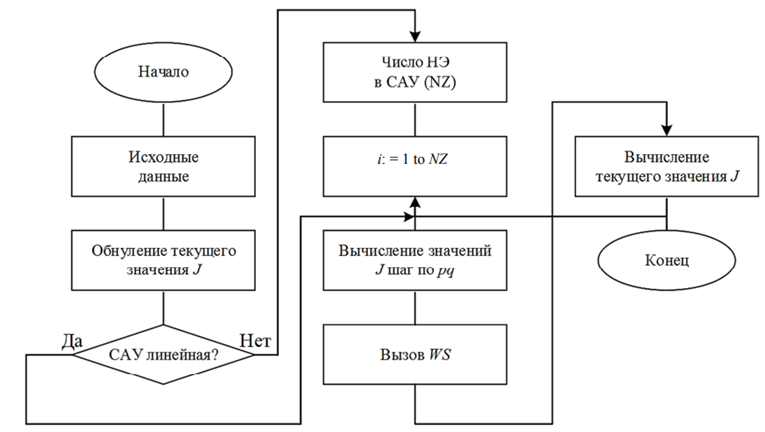
Рис. 2. Блок-схема процедуры вычисления функционала J: НЭ, NZ – нелинейный элемент
Fig. 2. Block diagram of the procedure for calculating the functional J: НЭ, NZ – is a non-linear element
Шаги алгоритма:
1. Алгоритм стартует с инициализации процесса.
2. Проверка исходных данных.
3. Переменная J, предназначенная для хранения конечного результата расчета, устанавливается равной нулю (J = 0).
4. Проверка САУ на линейность. Если САУ линейная, выполнение дальнейших расчетов не требуется, алгоритм завершается. Если САУ нелинейная, происходит переход к следующему шагу.
5. Определяется общее число нелинейных элементов в САУ, обозначаемое как NZ.
5. Запускается циклический процесс, охватывающий каждый нелинейный элемент системы (i) от первого до общего количества нелинейных элементов NZ.
7. Вычисляются J с шагом pq. Эти параметры используются для количественного описания поведения отдельного нелинейного элемента. Далее производится вызов специальной функции WS, именно в этом блоке вшиты полученные рекуррентные соотношения Bq (4)–(6). Итоговое обновление текущего значения J на основании предыдущих вычислений.
8. Вывод окончательного значения функционала J.
Заключение
В результате выполненного исследования была разработана методология синтеза САУ, основанная на обобщенном методе Галёркина и применении полиномиальной аппроксимации нелинейных характеристик. В рамках работы проведен анализ принципов отбора оптимального типа аппроксимации, а также предложен алгоритм минимизации целевой функции, учитывающие нелинейные свойства и физические ограничения систем. Важно отметить, что применение полиномиальной аппроксимации обладает несколькими преимуществами, например, позволяет более точно описать сложную форму нелинейной зависимости, особенно при увеличении степени полинома. Чем выше степень полинома, тем ближе аппроксимация приближается к реальной кривой, обеспечивая лучшее соответствие между математической моделью и поведением реальной системы. Таким образом, повышение степени полинома улучшает точность аппроксимации реальной кривой и соответствие модели поведению системы, что делает метод применимым к широкому спектру нелинейных характеристик – от статических зависимостей до динамических нелинейностей.
Модификация метода Галёркина применима как для непрерывных, так и для импульсных САУ, включая многосвязные системы. Таким образом, полученные результаты открывают значительные перспективы для повышения качества и надежности управления в различных отраслях промышленности.
1. Jingjing Gao, Xiangpeng Xie. A weighted switching sequence optimization algorithm for static output feedback control synthesis of nonlinear systems // Applied Mathematics and Computation. 2025. V. 489. P. 129152. https://doi.org/10.1016/j.amc.2024.129152.
2. Talha Mushtaq, Peter Seiler, Maziar S. Hemati. On the convexity of static output feedback control synthesis for systems with lossless nonlinearities // Automatica. 2024. V. 159. P. 111380. https://doi.org/10.1016/j.automa ica.2023.111380.
3. Pierdomenico Pepe. Nonlinear Systems With Delays // Encyclopedia of Systems and Control Engineering. Elsevier, 2026. P. 44–60. https://doi.org/10.1016/B978-0-443-14081-5.00154-9.
4. Peixuan Ding, Kaiyu Chen, Linlin Ou, Xinyi Yu, Weidong Zhang. Controller synthesis for a class of nonlinear systems with time delay based on stability region of PID controllers // ISA Transactions. 2025. V. 162. P. 85–94. https://doi.org/10.1016/j.isatra.2025.04.015.
5. Wen-Chao Huang, Hong-Fei Sun, Jian-Ping Zeng. Robust Control Synthesis of Polynomial Nonlinear Systems Using Sum of Squares Technique // Acta Automatica Sinica. 2013. V. 39. Iss. 6. P. 799–805. https://doi.org/10.1016/S1874-1029(13)60055-5.
6. Pyrkin A. A., Kolyubin S. A., Bobtsov A. A. Simple output controller for nonlinear systems with multisinusoidal disturbance // 21st Mediterranean Conference on Control and Automation, MED 2013. Crete: IEEE, 2013. P. 1087–1091.
7. Wang J., Aranovskiy S. V., Bobtsov A. A., Pyrkin A. A., Kolyubin S. A. A Method to Provide Conditions for Sustained Excitation // Automation and Remote Control. 2018. V. 79. N. 2. P. 258–264. DOIhttps://doi.org/10.1134/S0005117918020054.
8. Bobtsov A., Borgul A., Kolyubin S., Zimenko K., Rabyish E., Pyrkin A. Mechatronic and Robotic Setups for Modern Control Theory Workshops // Preprints of ACE2012: 9th IFAC Symposium on Advances in Control Education. IFAC Proceedings Volumes. 2012. V. 45. Iss. 11. P. 348–353.
9. Шишлаков В. Ф., Шишлаков Д. В. Параметриче-ский синтез многосвязных систем автоматического управления во временной области // Изв. высш. учеб. заведений. Проблемы энергетики. 2006. № 11-12. С. 49–53.
10. Никитин А. В., Шишлаков В. Ф. Параметриче-ский синтез нелинейных систем автоматического управления: моногр. СПб: Изд-во СПбГУАП, 2003. 358 с.
11. Shishlakov V., Vataeva E., Reshetnikova N., Shishlakov D., Solenaya O. Synthesis of nonlinear impulse systems // Smart Innovation, Systems and Technologies. 2021. V. 187. P. 469–476. DOIhttps://doi.org/10.1007/978-981-15-5580-0_38.
12. Ватаева Е. Ю. Параметрический синтез операторов управления САУ при полиномиальной аппроксимации характеристик нелинейных элементов // Тр. МАИ. 2023. № 128. URL: https://trudymai.ru/upload/iblock/450/6mfhhuss3uygnfsthl52yupcqhvecbpe/16_Vataeva.pdf (дата обращения: 14.08.2025).
13. Шишлаков В. Ф., Ватаева Е. Ю., Решетникова Н. В., Шишлаков Д. В. Синтез нелинейных импульсных систем при полиномиальной аппроксимации // Изв. высш. учеб. заведений. Приборостроение. 2019. Т. 62. № 9. С. 834–842. DOIhttps://doi.org/10.17586/0021-3454-2019-62-9-834-842.
