










Волгоград, Волгоградская область, Россия
Рассматривается проблема реализации захвата движения с использованием носимых сенсоров для задач математического моделирования походки человека на основе плоской пятизвенной модели. Для ре-ализации инерциальных сенсоров использован популярный акселерометрический и гироскопический датчик MPU-6050, содержащий цифровой сигнальный процессор DMP для обработки и фильтрации результатов измерений. Передача данных на персональный компьютер с модулей, закрепленных на теле человека, осуществляется посредством беспроводных каналов связи, реализованных на модулях nRF24L01 с низким энергопотреблением. Для валидации данных, получаемых с сенсоров, и оценки их точности использована система на основе оптических маркеров, считающихся «золотым стандартом» для захвата движения. На точность измерений с помощью инерциальных носимых сенсоров в значительной степени влияет выбор алгоритма фильтрации данных, получаемых непосредственно с акселерометра и гироскопа. В процессе валидации протестировано три метода обработки: комплементарный фильтр, фильтр Калмана, фильтр на основе DMP. Наиболее высокая точность при измерении положения сенсоров в процессе ходьбы получена при использовании фильтрации с помощью DMP. При расположении инерциального сенсора на бедре среднее отклонение от координат, полученных с помощью оптических маркеров, составило 2,39°, а для сенсора на голени – 2,42°. Средний по точности результат получен при использовании комплементарного фильтра, а наименее точный (с ошибкой в 5,1 и 7,3°) – с фильтром Калмана. Реализованная система из 5 инерциальных носимых сенсоров позволяет получить данные для моделирования походки человека с помощью плоской пятизвенной модели.
носимый сенсор, захват движения, инерциальный сенсор, походка, акселерометрический датчик, гироскопический датчик, фильтрация данных, валидация данных, движения человека
Введение
Одним из способов регистрации походки человека является захват движения. Технологии захвата движения могут быть построены на различных принципах. К наиболее распространенным реализациям технологии захвата движения относятся оптические [1], инерциальные и радарные системы [2]. Оптические системы делятся на маркерные и безмаркерные. В маркерных системах на теле человека надежно закрепляются визуально хорошо различимые маркеры, которые могут быть активными и пассивными. Пассивные маркеры, как правило, не содержат источник питания и сами по себе свет не излучают, а лишь отражают [3]. При этом часто используют свет в инфракрасном диапазоне [4]. Положение маркеров определяется посредством обработки изображений, поступающих с расположенных с разных сторон видеокамер. Одной из возникающих при этом проблем является перепутывание маркеров при их быстром перемещении. Для решения этой проблемы активные маркеры, помимо источника питания и излучающего элемента, содержат устройство, позволяющее управлять ими по радиоканалу, для обеспечения их надежной идентификации. Маркерные системы считаются «золотым стандартом» захвата движения ввиду их высокой точности и надежности [3, 5, 6]. Безмаркерные системы для определения взаимного расположения сегментов движущегося объекта используют технологии машинного зрения [3]. Для получения исходных изображений в них часто используется специальное оборудование (использующее, к примеру, инфракрасный датчик глубины), как в случае с Microsoft Kinect [2] и Vicon [7], или набор камер, работающих в видимом диапазоне света, что реализовано в технологиях KinaTrax [4], DARI Motion [4], Simi Reality Motion [6], Hawk-Eye Statcast [4], Theia3D [8]. В инерциальных системах захвата движения на теле человека закрепляются измерительные модули – IMU (inertial measurement unit), содержащие различные датчики, в качестве которых может выступать гироскоп, акселерометр, магнитометр [9], изготовленные на основе микроэлектромеханических систем [2]. В работе [5] эта технология предлагается в качестве альтернативы оптической системе захвата движения для моделирования при клинических исследованиях опорно-двигательного аппарата. При исследовании походки, помимо инерциальных, используются и другие виды сенсоров, в частности, в исследовании [10] используется сенсор F-Scan, измеряющий давление, оказываемое участками стопы на поверхность. Технология захвата движений имеет множество применений, одной из наиболее распространенных является анимация в кинематографе и индустрии развлечений [2]. Активно исследуются возможности применения захвата движения в здравоохранении и реабилитации. Сравнение чувствительности инерциальных сенсоров и маркерной оптической системы к патологическим изменениям походки проведено в исследовании [1]. В работе [8] предложено использовать в клинических тестах на равновесие безмаркерную систему захвата движения Theia3D совместно с методом главных компонент. Захват движений широко используется для оцифровки и анализа движений в спорте. В частности, в ходе исследования [7] подготовлен набор данных для оценки техники ударов в карате. Сравнение эффективности маркерной и безмаркерной системы оптического захвата движений для анализа техники выполнения ударов в гольфе приведено в статье [6].
Весьма широко в анализе походки человека используется инерциальный сенсор MPU-6050, содержащий в одном корпусе акселерометр и гироскоп [11–27], и MPU-9250, снабженный также и магнитометром для определения азимута. Для отслеживания движений в перечисленных исследованиях использовано различное количество сенсоров MPU-6050, закрепленных на различных участках тела: 4 (бедра и голени) [15], 6 (бедра, голени, стопы) [13], 7 сенсоров (бедра, голени, стопы, корпус) [17]. При этом совместно с инерциальными сенсорами могут использоваться другие типы датчиков. Так, в работе [17] использован 1 сенсор MPU-6050 и 4 резистивных датчика давления (FSR, force-sensitive resistor): под пяткой, под первой плюсневой костью, под четвертой плюсневой костью и под большим пальцем. Инерциальные сенсоры широко применяются при классификации движений. Для определения фаз походки различные исследователи использовали один-единственный инерциальный сенсор на голени [16], 1 инерциальный сенсор совместно с 8 FSR-датчиками с использованием нечеткой логики [26] и 6 инерциальных сенсоров (закрепленных возле тазобедренных, коленных и голеностопных суставов) с последующей классификацией данных с помощью нейронной сети [12]. Инерциальные сенсоры используются для определения поверхности, по которой движется человек (ровная и неровная поверхность, подъем и спуск по лестнице), и особенностей ходьбы (быстрая, медленная, бег, поворот) [22, 23], при этом сенсоры могут быть закреплены не только на человеке, но и на трости [25]. В работе [19] система на основе сенсора MPU-6050 и магнитометра используется для определения пути перемещения человека (PDR, pedestrian dead-reckoning) внутри помещения в случаях, когда GPS работает плохо. Исследуется применимость для диагностики болезни Паркинсона инерциальных сенсоров как самостоятельно [11], так и в комплексе с другими системами (электроэнцефалография и электромиография) [27]. В работе [21] предлагается система на основе сенсора MPU-6050 и 8 микро вибромоторов для лечения тремора у пациентов с болезнью Паркинсона.
Постановка цели и задач исследования
В работах [28, 29] предложен метод моделирования походки человека с помощью плоской пятизвенной модели (антропоморфного механизма), показанной на рис. 1: положение механизма характеризуется пятью координатами: φ, α1, α2, β1, β2, которые обозначают наклоны корпуса (OC), бедер (OB и OD) и голеней (BA и DE) относительно вертикальной оси соответственно.
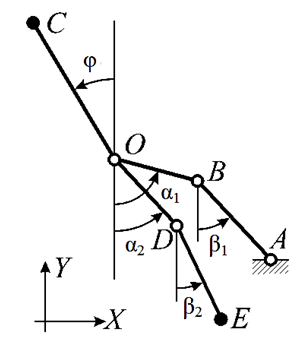
Рис. 1. Плоская пятизвенная антропоморфная модель человека
Fig. 1. Flat five-link anthropomorphic human model
Уравнения движения, составленные с использованием уравнений Лагранжа второго рода, имеют вид
![]()
где матрица B(z) является матрицей кинетической энергии, а матрица A определяет потенциальную энергию; – обобщенные ускорения; g – ускорение свободного падения;

где D(z) – матрица символов Кристоффеля первого рода для матрицы B(z); матрица-столбец ω содержит силы и моменты, действующие на механизм; C(z) – матрица для выражения обобщенных неконсервативных сил. Вид матриц B(z), A, D(z), C(z) и ω представлен в [29]. Для моделирования методом, описанным в [29], походки конкретного человека на интервале времени 0 < t < T необходимо иметь значения φ(t), α1(t), α2(t), β1(t), β2(t) на всем интервале времени с некоторой периодичностью. Указанные данные можно получить с помощью технологии захвата движения, в частности с помощью инерциальных измерительных модулей. По сравнению с оптическими системами они не чувствительны к условиям внешней среды (освещению, контрастности предмета или маркеров относительно фона) и не требуют присутствия человека в поле зрения устройства видеозахвата в течение всего цикла движения. Однако, поскольку человек перемещается, совершая колебательные движения, при измерении положения сенсоров может присутствовать ошибка, для оценки величины которой необходимо провести валидацию получаемых данных. Целью исследования является разработка комплекса устройств для получения данных походки, пригодных для моделирования движений человека с помощью плоской антропоморфной модели. Для достижения поставленной цели необходимо решить следующие задачи:
1. Разработать инерциальный измерительный модуль («сенсор»), передающий результаты измерений по беспроводному каналу связи.
2. Разработать устройство для приема данных с инерциальных измерительных модулей и передачи их на персональный компьютер (ПК), а также интерфейсное приложение для него.
3. Провести валидацию данных, получаемых с сенсоров во время движения человека, путем их сравнения с результатами оптического захвата движения на основе маркеров.
Инерциальный измерительный модуль
В качестве инерциального сенсора в разработанном устройстве использован модуль GY-521 с установленным на нем микроэлектромеханическим датчиком MPU-6050 от компании InvenSense, содержащим трехосевой акселерометр, трехосевой гироскоп, термодатчик и специализированный цифровой сигнальный процессор – Digital Motion Processor (DMP). Как было сказано ранее, MPU-6050 весьма часто используется в системах для анализа походки человека. Акселерометр измеряет ускорения вдоль трех перпендикулярных осей, а гироскоп – угловые скорости вокруг этих осей. Для определения угловых координат расположения сенсора можно использовать как гироскоп, так и акселерометр по отдельности, однако данные с акселерометра содержат шум и могут быть некорректными при быстром линейном перемещении. При измерении углов с помощью гироскопа наблюдается постоянный дрейф его показаний даже в состоянии покоя. Для более надежного определения положения сенсора чаще всего используют способы фильтрации, использующие одновременно данные гироскопа и акселерометра [30]. Имеющийся в датчике MPU-6050 цифровой сигнальный процессор DMP предназначен, в том числе, и для такой фильтрации. Угол поворота датчика вокруг вертикальной оси, вдоль которой действует сила тяжести, может быть определен только по показаниям гироскопа. В этом случае его может помочь определить магнитометр, имеющийся в MPU-9250, однако в этом нет необходимости, поскольку в используемой плоской пятизвенной модели поворот вокруг вертикальной оси не учитывается. Передача данных с датчика на микроконтроллер осуществляется по шине I2C. Полученные с каждого датчика данные в большинстве исследований передаются на персональный компьютер по беспроводному каналу. В работах [13, 18] все измерительные модули, размещенные на теле человека, соединены проводами c центральным модулем, и затем собранные данные сохраняются на флеш-накопитель [13] либо передаются по Bluetooth [18] на ПК, в остальных рассмотренных работах данные передавались на компьютер непосредственно с каждого измерительного модуля. В исследованиях [14, 15, 17] для передачи данных использовался интерфейс Bluetooth, в [16, 20, 22, 26] – Wi-Fi, а в [11] – модуль nRF24L01, передающий данные на частотах 2 400–2 527 МГц. В данной работе использован модуль nRF24L01, потребляющий наименьший ток по сравнению с HC-05 (Bluetooth) и ESP-01 (Wi-Fi), что важно, поскольку инерциальные модули питаются от автономного источника питания. На рис. 2 показана принципиальная электрическая схема инерциального измерительного модуля.

Рис. 2. Принципиальная электрическая схема инерциального измерительного модуля
Fig. 2. Schematic electrical diagram of an inertial measuring module
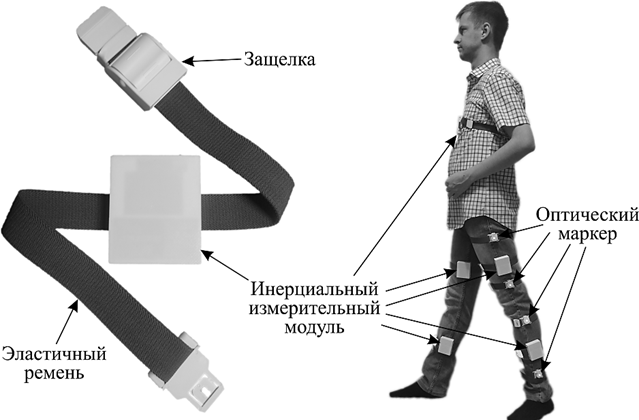
Основой модуля служит микроконтроллер ATmega328P (U2), работающий на частоте 16 МГц, аппаратно поддерживающий шину I2C, к которой подключен датчик MPU-6050 (U1), и интерфейс SPI, через который подключен модуль nRF24L01 (U3). Для отладки модуль имеет последовательный интерфейс, реализованный на микросхеме U4. Питание модуля осуществляется щелочной батареей 6LR61 через линейный стабилизатор U5. Щелочная батарея может быть заменена на аккумуляторную батарею. Посредством делителя напряжения на резисторах R1 и R2, подключенного к входу аналого-цифрового преобразователя, осуществляется контроль заряда питающей батареи. Инерциальный измерительный модуль размещен в пластмассовом корпусе и крепится к телу человека эластичной лентой на основе нейлона и латекса, которая фиксируется пластиковой защелкой с возможностью регулировки натяжения (рис. 3, а).
а б
Рис. 3. Инерциальный измерительный модуль: внешний вид устройства (а);
места размещения модулей и оптических маркеров на теле человека (б)
Fig. 3. Inertial measurement module: the appearance of the device (a);
placement of modules and optical markers on the human body (б)
В данной работе используется 5 инерциальных измерительных модулей, размещенных, как показано на рис. 3, б, на бедрах, голенях и корпусе. На рис. 3, б также показано расположение светящихся маркеров на левой ноге, используемых при валидации данных, получаемых с модулей. При включении модуля осуществляется калибровка, во время которой устройство должно располагаться неподвижно и вертикально (ось Z должна быть направлена вверх, в противном случае измерения будут выполнены некорректно). Результаты измерений отправляются по беспроводному каналу с максимальной периодичностью 100 раз в секунду.
Организация надежной передачи данных по беспроводному каналу связи
Прием данных с измерительных модулей для последующей отправки на ПК осуществляется с помощью модулей nRF24L01, аналогичных используемым для передачи. Модуль nRF24L01 одновременно может работать только на одном частотном канале, однако его особенностью является возможность использования так называемых труб (data pipe) с уникальными идентификаторами, позволяющих принимать данные одновременно с 6 устройств. Таким образом, для приема данных со всех измерительных модулей достаточно одного nRF24L01, однако при использовании стандартной библиотеки RF24 при одновременном приеме данных сразу с 5 измерительных модулей количество успешно принятых пакетов данных резко сокращается (со 100 до 15–30 в секунду). При использовании библиотеки RF24Network, специально предназначенной для реализации сетевой инфраструктуры на nRF24L01 с помощью труб, данные принимаются более стабильно за счет устойчивого алгоритма повторных запросов неудачно переданных данных, но для этого требуется высокая скорость передачи (2 Мбит/с), что сокращает максимальную дальность связи (по сравнению с 250 Кбит/с). Помимо этого, данные с модулей могут приниматься с задержкой, что может затруднить их последующую синхронизацию. В связи с этим для обеспечения более надежного приема данных с измерительных модулей использовано 5 модулей nRF24L01, каждый из которых принимает данные по отдельному радиочастотному каналу (от 2 485 до 2 525 МГц, с шагом 10 МГц). Несмотря на то, что каждый измерительный модуль передает данные на своей частоте, некоторые пакеты принимаются приемниками, работающими на другой частоте. Эта проблема полностью решена использованием разных идентификаторов труб для каждого канала. Светодиодная индикация приема данных с измерительных модулей позволяет контролировать их своевременное отключение для экономии заряда батареи. Качество приема при таком подходе существенно выше, чем при приеме на один модуль, однако имеются и недостатки. Помимо необходимости использования большего количества модулей nRF24L01 имеет значение их взаимное расположение: близкое расположение антенн негативно сказывается на общем качестве приема.
Фильтрация и интерпретация данных носимого сенсора
Для обработки данных, получаемых с акселерометрического и гироскопического сенсора, в большинстве исследований применяют комплементарный фильтр [11, 14, 15] и фильтр Калмана [12, 13, 31].
Комплементарный фильтр позволяет получить угол наклона сенсора θ путем комбинирования данных с акселерометра и гироскопа [11]:
![]()
где ωgyro – угловая скорость, измеренная гироскопом за время Δt, θaccel – угол, рассчитанный по значениям ускорений, измеренных акселерометром. Коэффициент α в данной работе использован равный 0,02. Фильтр Калмана представляет собой рекурсивный алгоритм, каждая итерация которого состоит из двух фаз: предсказания и корректировки [32, 33]. Предсказываемое состояние системы в текущий момент времени x̂k|k–1 оценивается следующим образом:
![]()
где x̂k–1|k–1 – оценка состояния системы в прошлый момент времени; F – матрица (модель) перехода между состояниями; B – матрица применения управляющего воздействия uk. Для текущей задачи матрица xk задается в следующем виде:
где θ – угол наклона сенсора; ![]() – смещение, обусловленное дрейфом показаний гироскопа. В качестве управляющего сигнала uk используется угловая скорость
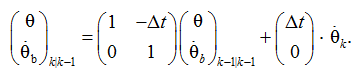
– смещение, обусловленное дрейфом показаний гироскопа. В качестве управляющего сигнала uk используется угловая скорость ![]() , измеренная гироскопом за время Δt. Матрицы перехода между состояниями F и управления B имеют вид
, измеренная гироскопом за время Δt. Матрицы перехода между состояниями F и управления B имеют вид

Таким образом, предсказываемое состояние системы рассчитывается следующим образом:
Предсказываемая ковариационная матрица ошибок Pk|k–1 вычисляется по формуле
![]()
где Pk–1|k–1 – ошибка в прошлый момент времени; Qk – ковариационная матрица шума процесса:

где Qθ – дисперсия значений акселерометра; ![]() – дисперсия смещения значений гироскопа. На этапе корректировки предсказанное значение изменяется в соответствии с результатами нового измерения. Вначале рассчитывается отклонение результата измерения от предсказываемого состояния:
– дисперсия смещения значений гироскопа. На этапе корректировки предсказанное значение изменяется в соответствии с результатами нового измерения. Вначале рассчитывается отклонение результата измерения от предсказываемого состояния:
![]()
где H – модель наблюдения, отображающая истинное пространство в наблюдаемое, определяемая как H = (1 0), поскольку под измерением понимается угол, измеренный с помощью акселерометра; zk – результат измерения. Затем вычисляется матрица коэффициентов усиления Калмана:
![]()
где R – ковариация шума измерения. Обновленная оценка состояния системы рассчитывается по формуле
![]()
На финальном шаге алгоритма обновляется ковариационная матрица ошибок:
В данной работе использовались следующие значения параметров: Qθ = 0,001, ![]() = 0,003, R = 0,03. При использовании датчика MPU-6050 фильтрация часто осуществляется с использованием DMP, представляющего собой встроенный специализированный цифровой сигнальный процессор, который осуществляет обработку и фильтрацию данных с акселерометра и гироскопа. В этом случае с датчика MPU-6050 поступают уже отфильтрованные значения ускорений вдоль трех перпендикулярных осей: ax, ay, az. Разработанные инерциальные измерительные модули закреплены на боковых поверхностях ног и на передней стороне корпуса, как показано на рис. 3, б, поэтому для первых рассчитываются значения угла поворота вокруг оси x (обозначенного как φ), а для последнего – вокруг оси y (θ), по формулам [30]
= 0,003, R = 0,03. При использовании датчика MPU-6050 фильтрация часто осуществляется с использованием DMP, представляющего собой встроенный специализированный цифровой сигнальный процессор, который осуществляет обработку и фильтрацию данных с акселерометра и гироскопа. В этом случае с датчика MPU-6050 поступают уже отфильтрованные значения ускорений вдоль трех перпендикулярных осей: ax, ay, az. Разработанные инерциальные измерительные модули закреплены на боковых поверхностях ног и на передней стороне корпуса, как показано на рис. 3, б, поэтому для первых рассчитываются значения угла поворота вокруг оси x (обозначенного как φ), а для последнего – вокруг оси y (θ), по формулам [30]

Валидация данных инерциальных сенсоров с помощью системы оптических маркеров
В работах [15, 20, 24] отмечается, что датчик MPU-6050 позволяет достаточно точно определять угловые координаты, в том числе и при движении, однако имеет место некоторый шум, обусловленный, в том числе, несовершенством алгоритмов фильтрации. В статье [20] для оценки точности носимые сенсоры крепились к сегментам робота-манипулятора. В данной работе для валидации данных сенсоров измерительные модули крепятся к телу идущего человека, а точное положение тела определяется с помощью системы оптических маркеров. Такой подход предпочтительнее, поскольку на угловые измерения с помощью инерциальных сенсоров сильно влияют перемещения вдоль осей координат, возникающие, в том числе, при перемещении человека в пространстве. Для валидации использовались данные с двух инерциальных сенсоров, закрепленных на бедре и голени левой ноги. Оптические маркеры, представляющие собой непрерывно светящиеся красные светодиодные излучатели, закреплялись на верхней и нижней части бедра и голени, как показано на рис. 3, б. Съемка проводилась в ярко освещенном помещении с разрешением 1 920 × 1 088 и частотой 30 кадров/с. Определение точных координат маркеров на кадрах видео осуществлялось вручную. Использование маркерной системы захвата движения для валидации в качестве эталонной также предлагается в [4]. Как видно на рис. 4, наиболее точные координаты с инерциальных носимых сенсоров получены с использованием фильтрации на основе DMP.

а б
Рис. 4. Сравнение динамики угловых движений бедра (а) и голени (б),
полученных с помощью оптического захвата движения (сплошная линия) и с использованием инерциальных сенсоров с различным типом фильтрации
(штриховая линия – DMP, пунктирная – комплементарный фильтр, штрихпунктирная – фильтр Калмана)
Fig. 4. Comparison of the dynamics of angular movements of the thigh (a) and shin (б)
obtained using optical motion capture (solid line) and using inertial sensors with different types of filtration
(dashed line – DMP, dotted line – complementary filter, dotted line – Kalman filter)
Среднее отклонение от координат, полученных с помощью оптических маркеров, составило 2,39° (для бедра) и 2,42° (для голени), а максимальное – 5,7° и 7,6° соответственно. При использовании комплементарного фильтра среднее отклонение составило 3,3° и 5,8°, а максимальное – 8,3° и 16,3°. Наихудший результат получен с помощью фильтра Калмана: среднее отклонение – 5,1° и 7,3°, максимальное – 14,5° и 20,5°. Кроме того, на графиках хорошо заметно, что наибольшее отклонение возникает при смене направления движения сенсора.
Результаты захвата движения с помощью носимых сенсоров
С помощью разработанных носимых сенсоров получены зависимости φ(t), α1(t), α2(t), β1(t), β2(t) для 4 экземпляров походки одного человека, идущего прямолинейно по ровной поверхности (рис. 5).
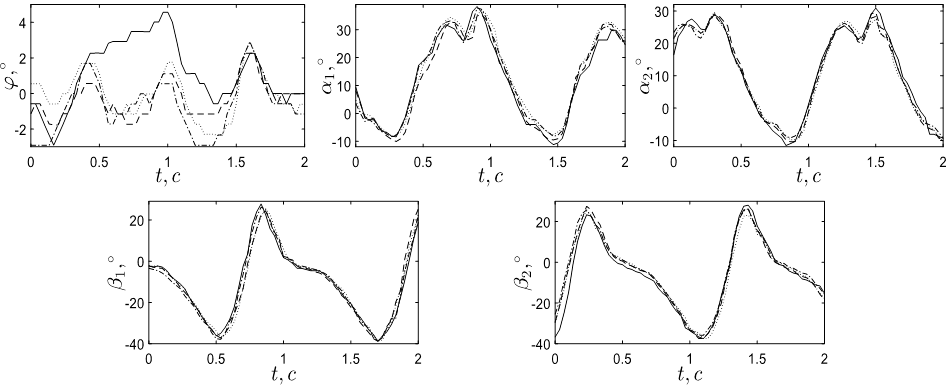
Рис. 5. Динамика движений корпуса (φ), бедер (α1 и α2) и голеней (β1 и β2),
полученная с помощью инерциальных носимых сенсоров (каждый тип линии описывает один экземпляр походки)
Fig. 5. Dynamics of torso (φ), thigh (α1, α2) and shin (β1, β2)
movements obtained using inertial wearable sensors (each line type is a gait sample)
На графиках движения бедер и голеней наблюдается высокая корреляция (более 0,98) между экземплярами походки одного человека. Это свойство обуславливает возможность использования походки в качестве уникального признака для идентификации человека [34]. При этом корреляция между движениями корпуса на разных экземплярах походки очень слабая (от 0,01 до 0,4 между походкой, обозначенной сплошной линией, и остальными), что может быть обусловлено малой амплитудой колебаний (менее 5°) и влиянием других факторов (осанка, движения рук).
Заключение
В ходе работы спроектированы и изготовлены инерциальные носимые сенсоры на основе микроэлектромеханического модуля MPU-6050 для регистрации походки человека, передающие результаты измерений по беспроводному каналу связи. Для передачи данных использованы модули nRF24L01, потребляющие наименьший ток по сравнению с аналогичными устройствами, которые работают по протоколам Bluetooth и Wi-Fi. Модули MPU-6050 содержат акселерометрический и гироскопический датчики, показания которых содержат шум. В связи с этим точность определения положения модуля в пространстве весьма значительно зависит от использованного метода фильтрации. На точность измерений углового положения сенсора также оказывают влияние перемещения модуля вдоль осей координат с ускорением. Для оценки точности регистрации походки человека проведена валидация разработанных инерциальных носимых сенсоров с использованием набора оптических маркеров. Наиболее высокая точность получена с использованием фильтрации на основе DMP. При этом среднее отклонение от точных значений составило 2,39° (при расположении модуля на бедре). Обработка данных с использованием комплементарного фильтра и фильтра Калмана позволила получить менее точные траектории, со средней ошибкой, равной 3,3° и 5,1° соответственно. Следует также учесть, что последние два фильтра содержат настраиваемые параметры и, вероятно, при некоторых их значениях точность регистрации отдельных видов движений будет выше.
Реализованная система сенсоров позволяет получить данные, необходимые для моделирования походки с использованием плоской пятизвенной модели.
1. Lee J. Yu., Shin S., Ghorpade G., Akbas T., Sulzer J. Sensitivity comparison of inertial to optical motion capture during gait: implications for tracking recovery // IEEE International Conference on Rehabilitation Robotics. 2019. V. 2019. P. 139–144.
2. Callejas-Cuervo M., Espitia-Mora L., Vélez-Guerrero M. Review of optical and inertial technologies for lower body motion capture // Journal of Hunan University (Natural Sciences). 2023. V. 50. N. 6. P. 101–120.
3. Шейко Г. Е., Белова А. Н., Рукина Н. Н., Короткова Н. Л. Возможности применения биомеханических систем захвата движений человека в медицинской реабилитации (обзор) // Физическая и реабилитационная медицина, медицинская реабилитация. 2022. Т. 4. № 3. С. 181–196.
4. Dobos T., Bench R., Mckinnon C., Brady A., Boddy K., Holmes M., Sonne M. Validation of pitchAI TM markerless motion capture using marker-based 3D motion capture // Sports Biomechanics. 2022. P. 1–21.
5. Dasgupta A., Sharma R., Mishra C., Nagaraja V. H. Machine learning for optical motion capture-driven musculoskeletal modelling from inertial motion capture data // Bioengineering. 2023. V. 10. P. 510.
6. Гусейнов Д. И. Сравнительный анализ биомеханических показателей в системах маркерного и безмаркерного видеозахвата движений // Докл. БГУИР. 2023. Т. 21. № 1. С. 35–42.
7. Szczęsna A., Błaszczyszyn M., Pawlyta M. Optical motion capture dataset of selected techniques in beginner and advanced Kyokushin karate athletes // Scientific Data. 2021. V. 8. N. 1. P. 13.
8. Eveleigh K., Deluzio K., Scott S., Laende E. Principal component analysis of whole-body kinematics using markerless motion capture during static balance tasks // Journal of Biomechanics. 2023. V. 152. P. 111556.
9. Dong Z., Cheng G., Lou Q., Li D., Gao N., Xu Y., Yu X. Human motion capture based on MEMS sensor // Journal of Physics: Conference Series. 2023. V. 2456. P. 012047.
10. Mohammed S., Samé A., Oukhellou L., Kong K., Huo W., Amirat Y. Recognition of gait cycle phases using wearable sensors // Robotics and Autonomous Systems. 2014. V. 75. P. 50–59.
11. Chang H.-C., Hsu Y.-L., Yang S.-C., Lin J.-C., Wu Z.-H. A wearable inertial measurement system with complementary filter for gait analysis of patients with stroke or Parkinson’s disease // IEEE Access. 2016. V. 4. P. 8442–8453.
12. Evci F., Saroglu Y., Konukseven E. I. Gait recogni-tion and phase detection using wearable IMU sensors and neural network algorithms // Proceedings of the 2023 7th International Conference on Advances in Artificial Intelli-gence. NY, USA: Association for Computing Machinery, 2024. P. 138–143.
13. Figueiredo J., Carvalho S. P., Vilas-Boas J. P., Gonçalves L. M., Moreno J. C., Santos C. P. Wearable inertial sensor system towards daily human kinematic gait analysis: benchmarking analysis to MVN BIOMECH // Sensors. 2020. V. 20. N. 8. P. 2185.
14. Fitriani D. A., Andhyka W., Risqiwati D. Design of monitoring system step walking with MPU6050 sensor based android // JOINCS (Journal of Informatics, Network, and Computer Science). 2017. V. 1. N. 1. P. 1–8.
15. Franco T., Sestrem L., Henriques P. R., Alves P., Varanda Pereira M. J., Brandão D., Leitão P., Silva A. Motion sensors for knee angle recognition in muscle rehabilitation solutions // Sensors. 2022. V. 22. N. 19. P. 7605.
16. Gong S., Wang Z., Ye W., Hua Q. Real-time detec-tion system of gait event for disabled people // Journal of Physics: Conference Series. 2020. V. 1650. N. 3. P. 032106.
17. Guo X., Yang C., Chen X., Xu T. Design of gait detection system based on FCM algorithm // Learning & Education. 2022. V. 10. N. 8. P. 3061.
18. Kardos S., Balog P., Slosarcik S. Gait dynamics sensing using IMU sensor array system // Advances in Electrical and Electronic Engineering. 2017. V. 15. N. 1. P. 71–76.
19. Lüy M., Ulamış F., Çam E. Position estimation with fuzzy logic based dead reckoning for GPS-denied environ-ment // International Journal of Engineering Research and Development. 2017. V. 9. N. 3. P. 21–28.
20. Mota F. A. O., Biajo V. H. M., Mota H. O., Vasconcelos F. H. A wireless sensor network for the biomechanical analysis of the gait // 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC). Turin, Italy: IEEE, 2017. P. 1–6.
21. Páez Salgado R. J., Valderrama Manrique M. A., Duarte Monsalve Y. G. A. Development of a device for the treatment of tremors in patients with Parkinson's disease through inverse vibrations // Uniandes. Bogota, Colombia: Universidad de los Andes, 2019. P. 1–8.
22. Shaikh U. Q., Shahzaib M., Shakil S., Bhatti F. A., Aamir Saeed M. Robust and adaptive terrain classification and gait event detection system // Heliyon. 2023. V. 9. N. 11. P. e21720.
23. Slemenšek J., Fister I., Geršak J., Bratina B., van Midden V. M., Pirtošek Z., Šafarič R. Human gait activity recognition machine learning methods // Sensors. 2023. V. 23. N. 2. P. 745.
24. Sultan J., Zani N., Azuani M., Ibrahim S., Yusop A. Analysis of inertial measurement accuracy using complementary filter for MPU6050 sensor // Jurnal Kejuruteraan. 2022. V. 34 (5). P. 959–964.
25. Wang J., Saada M., Cai H., Meng Q. Walking mo-tion real-time detection based on walking stick equipped with MPU and Raspberry Pi // Embedded Intelligence: Enabling & Supporting RAS Technologies. Loughborough: UK-RAS Network, 2019. P. 118–120.
26. Weidong G., Zhenwei Z. Gait phase recognition us-ing fuzzy logic regulation with multisensor data fusion // Journal of Sensors. 2021. V. 2021. N. 1. P. 8776059.
27. Zhang W., Yang Z., Li H., Huang D., Wang L., Wei Y., Zhang L., Ma L., Feng H., Pan J., Guo Y., Chan P. Multimodal data for the detection of freezing of gait in Parkinson's disease // Scientific Data. 2022. V. 9. N. 1. P. 606.
28. Sivolobov S. V., Khoperskov A. V., Bumagin V. V. Human gait modeling method // IOP Conference Series: Materials Science and Engineering. 2020. V. 823. P. 012024.
29. Сиволобов С. В. Математическое моделирование походки человека на основе пятизвенной модели антропоморфного механизма с использованием методов оптимизации // Математическая физика и компьютерное моделирование. 2024. Т. 27. № 1. С. 62–85.
30. Islam Md. S., Shajid-Ul-Mahmud Md., Islam T., Amin Md. S., Hossam-E-Haider Md. A low cost MEMS and complementary filter based attitude heading reference system (AHRS) for low speed aircraft // 2016 3rd International Conference on Electrical Engineering and Information Communication Technology (ICEEICT). Dhaka, Bangladesh: IEEE, 2016. P. 1–5.
31. Макаров С. С., Негинский И. В., Якимец А. Л. Адаптивный фильтр сигнала датчика ускорения // Математическая физика и компьютерное моделирование. 2024. Т. 26. № 2. С. 72–80.
32. Бобырь М. В., Булатников В. А. Моделирование нечеткого фильтра и фильтра Калмана для обработки входного сигнала // Информационные технологии и нанотехнологии (ИТНТ-2020). Самара: Изд-во Самар. национ. исслед. ун-та им. акад. С. П. Королева, 2020. Т. 4. С. 825–830.
33. Истомин Е. П., Колбина О. Н., Сидоренко А. Ю., Яготинцева Н. В., Каламбет М. В. О применении фильтра Калмана при прогнозировании значений параметров природной системы // Информация и Космос. 2021. № 2. С. 106–111.
34. Bashir K., Xiang T., Gong S. Gait recognition using Gait Entropy Image // Proceedings of 3rd International Conference on Imaging for Crime Detection and Prevention (ICDP 2009). London: IET, 2010. P. 1–6.
