












Россия
Россия
Россия
Россия
Нелинейные потребители электрической энергии значительной мощности при работе в составе единой судовой электроэнергетической системы (СЭЭС) оказывают сильное влияние на качество генерируемого напряжения, которое характеризуется различными электрическими параметрами, в том числе коэффициентом нелинейных искажений KНИ. При питании от такой сети возможно появление искажения сигналов радионавигационной аппаратуры и систем управления, снижение КПД электродвигателей, генераторного оборудования и потребителей электрической энергии, ухудшение состояния кабельных сетей и т. д. Применяя активные и пассивные способы компенсации нелинейных искажений напряжения, можно снизить влияние нелинейных потребителей электроэнергии на качество напряжения генерируемой электроэнергии СЭЭС. Один из эффективных способов компенсации – это применение активного компенсатора нелинейных искажений, который позволяет снизить KНИ до значений 4–5 %. Применение в активном компенсаторе, построенном на базе вольтодобавочного устройства, двухканальной системы измерения и управления, является эффективным способом компенсации нелинейных искажений. Предложена новая, отличающаяся от известных, структурная схема компенсатора нелинейных искажений, на основе которой была разработана имитационная модель судовой электроэнергетической системы в прикладном пакете Simulink графической среды имитационного моде-лирования MatLab. Имитационное моделирование подтвердило, что применение двухканальной системы управления и измерения позволяет снизить уровень коэффициента нелинейных искажений напряжения гене-рируемой электроэнергии до 2–3 % при мощности нелинейных потребителей не более 60 % от мощности ис-точника электроэнергии. Повышение мощности вольтодобавочного трансформатора активного компенсатора при тех же условиях позволяет уменьшить коэффициент нелинейных искажений на 0,5 %.
качество напряжения, судовая сеть, нелинейные искажения напряжения, ответственные потребители, активный компенсатор гармоник напряжения, вольтодобавочное устройство, вольтодобавочный трансформатор, двухканальная система измерения и управления
Введение
При работе нелинейных потребителей на общую судовую сеть возникают нелинейные искажения (НИ) напряжения, которые оцениваются различными параметрами, в том числе коэффициентом KНИ. При значениях KНИ более 10 % могут возникать перебои в работе радионавигационных систем, интегрированных автоматических систем управления, происходит снижение коэффициента полезного действия электродвигателей и генераторов, снижается срок службы судовых кабельных сетей и т. д. [1–8]. В судовых электроэнергетических системах (СЭЭС), где мощность отдельных нелинейных потребителей не превышает 30 % от мощности генераторов, к примеру на сухогрузных судах, KНИ достигает значений 14–15 % [7]. На нефтеналивных судах, судах с гребной электрической установкой, где нелинейные потребители имеют мощность 55–65 % от мощности генераторов, KНИ может достигать 20–25 %. Компенсация таких значений KНИ до требуемых Российским морским регистром судоходства стандартными средствами (пассивные фильтры, стабилизаторы и т. д.) практически невозможна. В таком случае применяют другие устройства улучшения качества напряжения. Одним из таких устройств может являться активный компенсатор (АК), собранный на базе вольтодобавочного устройства (ВДУ) с двухканальной системой измерения и управления.
Методы исследований
Известны математические модели измерения и управления АК с одноканальной системой измерения [9, 10]. С использованием структурной схемы АК с одноканальной системой управления и измерения была разработана структурная схема АК с двухканальной системой измерения и управления. Модель АК разработана в прикладном пакете Simulink графической среды имитационного моделирования MatLab [11]. Выполнены исследования моделирования для двух вариантов АК и произведен сравнительный анализ полученных результатов. Проведен сравнительный анализ результатов моделирования АК с двухканальной системой измерения и управления с различными коэффициентами усиления и мощностями вольтодобавочных трансформаторов.
Описание системы
На рис. 1 представлена функциональная схема судовой системы распределения электроэнергии с АК на базе ВДУ с двухканальной системой измерения и управления. Она состоит из двух синхронных генераторов – Г1 и Г2, главного распределительного электрического щита (ГРЭЩ), АК, потребителей П1 и П2.
В первую группу (П1) входят потребители, на работу которых качество напряжения влияет несущественно. К ним можно отнести электроприводы с частотными преобразователями или с системами лавного пуска, электрический обогрев и т. д. Ко второй группе потребителей (П2) относятся ответственные потребители, стабильная работа которых зависит от качества питающего напряжения, поэтому они подключаются через АК НИ [12–15]. К ответственным за живучесть судна можно отнести потребителей:
– с нелинейной нагрузкой (НН): радионавигационная аппаратура, комплексная система управления судном и прочее оборудование;
– с линейной нагрузкой (ЛН): релейные системы управления пускателей наиболее ответственных потребителей, таких как пожарные и балластно-осушительные насосы.
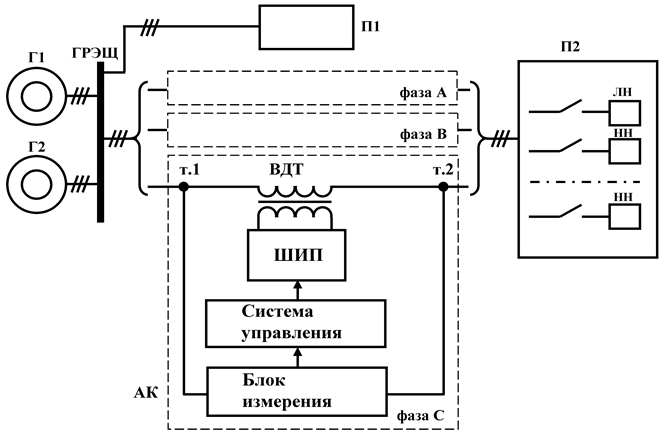
Рис. 1. Функциональная схема судовой системы распределения электроэнергии с активным компенсатором
Fig. 1. Functional diagram of the ship's power distribution system with an active compensator
Рассмотрим работу блоков АК высших гармоник напряжения на базе ВДУ с двухканальной системой измерения и управления (см. рис. 1). Блок измерения анализирует напряжение на входе ВДУ – основной сигнал (т. 1) и напряжение на выходе ВДУ – корректирующий сигнал (т. 2). Эти сигналы суммируются, а результат поступает в блок управления широтно-импульсным преобразователем (ШИП). Система управления формирует четырехтактный сигнал для управления ШИП. Трехканальный ШИП обеспечивает формирование переменного напряжения необходимой формы из постоянного. Вольтодобавочный трансформатор (ВДТ) устанавливается в каждой фазе и обеспечивает передачу гармоник напряжения от ШИП в судовую сеть.
Структурная схема компенсатора с двухканальной системой измерения и управления представлена на рис. 2. Компенсатор формирует напряжение, форма которого компенсирует высшие гармонические напряжения в судовой сети. Система управления и измерения АК состоит их двух каналов – основного, который включает в себя усилитель Ку1, фильтр Ф1 и сумматор СУ1, и корректирующего – Ку2, Ф2, СУ2 соответственно.
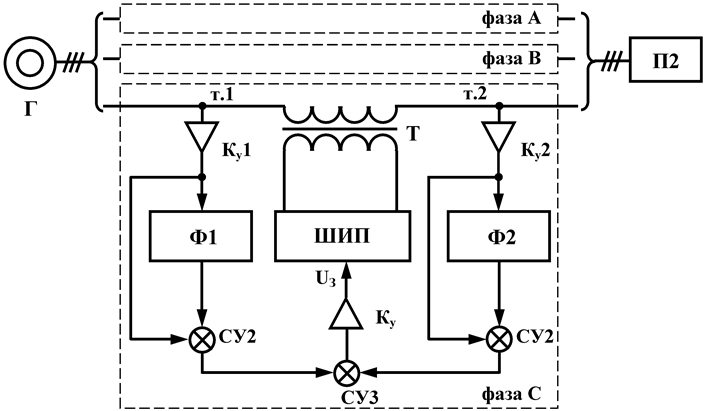
Рис. 2. Структурная схема двухконтурной системы измерения и управления
Fig. 2. Block diagram of a two-circuit measurement and control system
Основной канал формирует сигнал управления ШИП, который компенсирует большую часть НИ. Корректирующий канал измеряет остаточный коэффициент НИ после ВДУ в т. 2 и формирует сигнал компенсации задающего воздействия ШИП для корректировки. Результирующий сигнал компенсации формируется сложением сигналов основного и корректирующего блоков на сумматоре СУ3. Этот сигнал преобразуется усилителем Ку и является сигналом задания UЗ для управления ШИП. Коэффициенты усиления Ку1 и Ку2, а также параметры фильтров Ф1 и Ф2 настраиваются для каждого блока индивидуально с целью получения максимальной степени компенсации НИ.
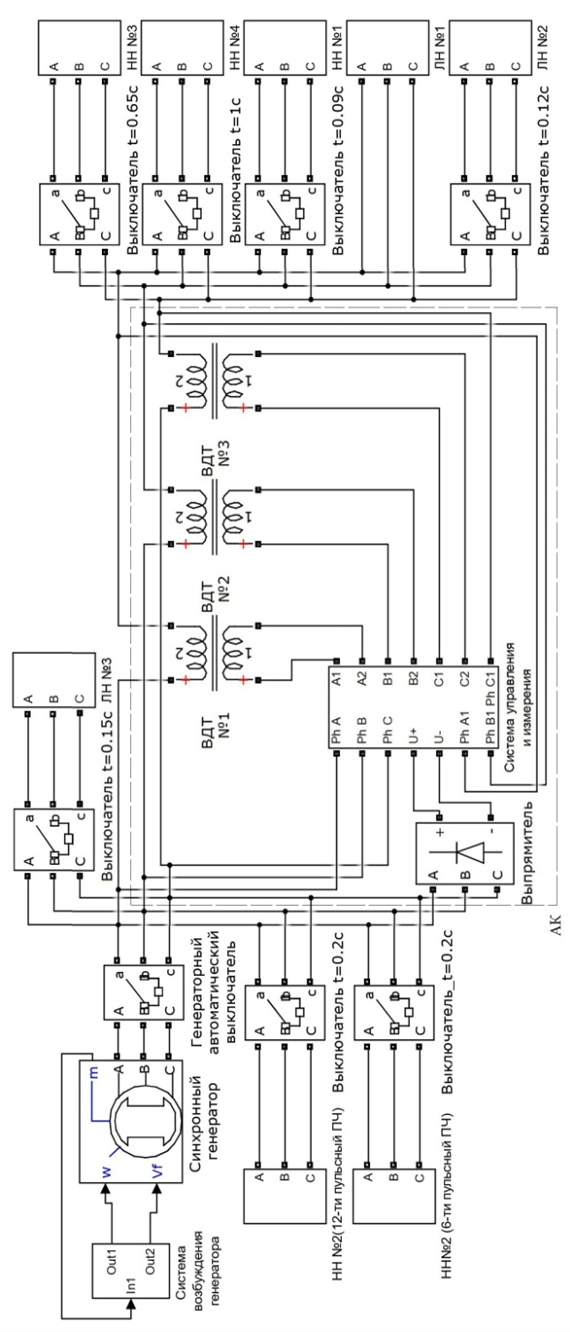
На рис. 3 представлена модель электроэнергетических систем SimPowerSystem на основе структурной схемы (см. рис. 1), выполненная в графической среде имитационного моделирования Simulink.
Модель состоит из силовой части, реализованной на эквивалентном генераторе; ЛН, включаемой после запуска генератора; ЛН, включаемых в заданный момент времени с помощью выключателей; НН, подключаемых в заданный момент времени; АК.
Силовая часть модели выполнена на базе эквивалентного синхронного генератора мощностью 250 кВА с системой регулирования выходного напряжения [10]. Линейная нагрузка выполнена в виде трех блоков с мощностями: 5 кВА (включается после запуска генератора), 17,5 и 25 кВА, включаемых в периоды времени 0,12 и 0,15 с соответственно.
Активный компенсатор собран из блока выпрямителя, системы измерения и управления, ШИМ-контроллера и ВДТ № 1–3. Нелинейная нагрузка представлена несколькими блоками и подключается к сети в определенные моменты времени:
– мощностью 95 кВА (6-пульсный преобразователь частоты (ПЧ) подключается к судовой сети при 0,2 с);
– мощностью 95 кВА (12-пульсный ПЧ подключается к судовой сети при 0,2 с);
– три блока мощностью по 20 кВА, включаемые через промежутки времени 0,09, 0,65 и 1 с.
На рис. 4 приведена модель системы управления и измерения с ШИП. В отличие от одноканальной системы управления [9], схема имеет два измерительных трансформатора (ИТ1, ИТ2), с которых поступает информация в систему измерения и управления (СИ и У). В блоке СИ и У входные сигналы суммируются, а на выходе формируется общий сигнал управления ШИП.
В результате моделирования АК с новой двухканальной системой управления и измерения построены диаграммы значений KНИ при различных коэффициентах усиления регуляторов (рис. 5).
Согласно диаграмме (рис. 5) при увеличении Ку1 (от 10 и более) KНИ уменьшается, а при достижении значения Ку = 23 наблюдается обратный эффект – KНИ начинает повышаться. Для наглядности на диаграмме (рис. 5) показано изменение KНИ при КУ = 37. Дальнейшее увеличение значения КУ не имеет смысла.
Для сравнения значений KНИ при работе систем управления с одноканальной системой измерения и двухканальной была собрана модель, позволяющая выполнить одновременный запуск двух систем с изменяющейся мощностью нагрузки РНН.
|
Рис. 3. Модель судовой электростанции с активным компенсатором Fig. 3. Model of a marine power plant with an active compensator |

|
Рис. 4. Модель системы управления и измерения с ШИП Fig. 4. Model of the control and measurement system with PWM |
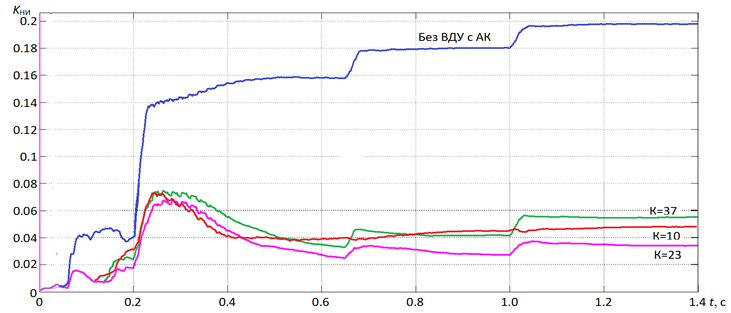
Рис. 5. Диаграмма значений KНИ при различных коэффициентах усиления системы измерения
в активном компенсаторе
Fig. 5. Diagram of the values of the KND at different amplification coefficients of the measurement system
in the active compensator
Сравнительный анализ диаграмм (рис. 6) доказывает, что в момент подключения (0,2 с) НН большой мощности (95 кВА) к генератору мощностью 250 кВА происходит рост значения KНИ обеих систем. Однако спустя 0,05 с значение KНИ одноканальной системы резко снижается, что свидетельствует о вступлении системы в действие, а двухканальной – остается на том же уровне. Отметим, что в двухканальной системе регулирования наблюдаются автоколебания, которые продолжаются в течение 0,1 с. В дальнейшем KНИ снижается, достигая значения ниже, чем в одноканальной системе.
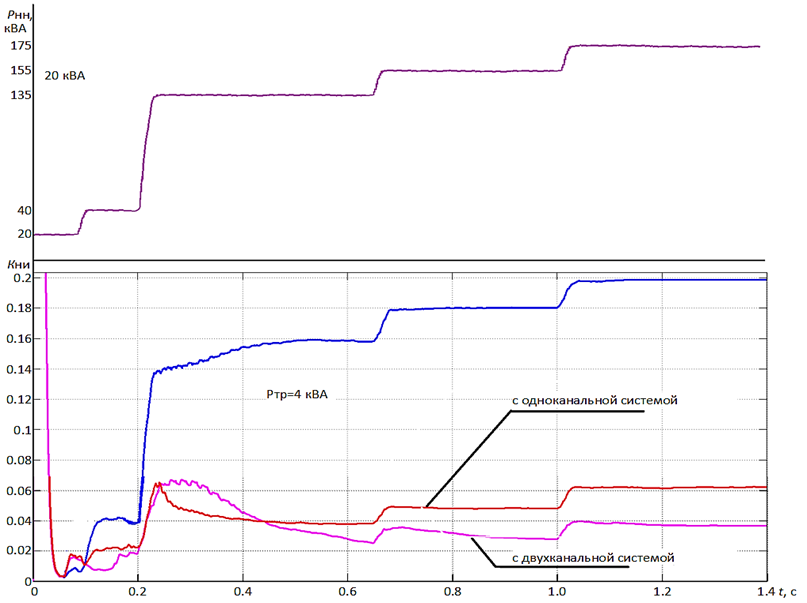
Рис. 6. Диаграмма значений KНИ с одноканальной и двухканальной системами измерения
в активном компенсаторе
Fig. 6. Diagram of the values of KND with a single-channel and two-channel measurement systems
in the active compensator
Наброс нагрузки меньшей мощности не вызывает подобных колебательных процессов, а KНИ имеет пониженное значение по сравнению с одноканальной системой регулирования. Следует отметить, что автоколебания возникают при превышении соотношения мощности НН к мощности генератора более чем 1 : 3.
На диаграмме рис. 7 показано изменение KНИ при разной мощности ВДТ АК. Было замечено, что повышение мощности ВДТ несколько снижает значение KНИ, однако этот процесс имеет тенденцию к замедлению при достижении мощности ВДТ 6,3 кВА и более.
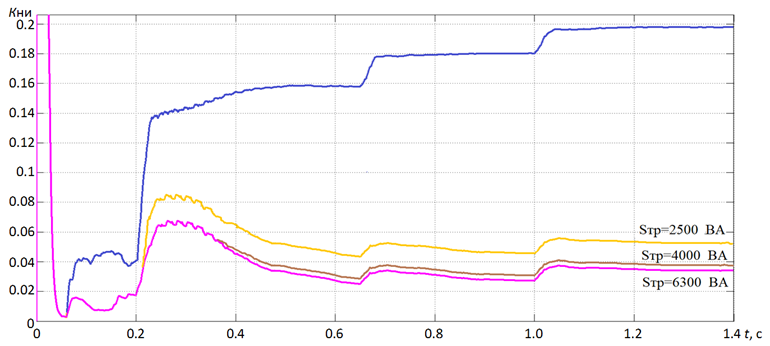
Рис. 7. Диаграмма значений KНИ при разной мощности вольтодобавочных трансформаторов
активного компенсатора
Fig. 7. Diagram of the values of the KND at different power supply voltage transformers of the active compensator
Заключение
Разработана имитационная модель АК нелинейных искажений в программе MatLab, которая учитывает соотношение мощностей нагрузки, в том числе нелинейного характера, и мощности АК. Предложенная структура и алгоритм работы АК являются новыми и отличаются от известных одноканальных систем компенсирования. Модель АК позволяет выполнить настройку системы регулирования АК для достижения минимальных значений KНИ в судовой сети. Для двухканальной системы регулирования определены коэффициенты усиления и мощность ВДТ, обеспечивающие снижение KНИ в установившемся режиме работы в 1,5–2 раза.
1. Шейнихович В. В. Качество электрической энергии на судах: справ. Л.: Судостроение, 1988. 160 с.
2. Грунтович Н. В., Алферов А. А. Анализ влияния высших гармоник на надежность эксплуатации кабельных линий // Актуальные проблемы электроэнергетики: материалы науч.-техн. конф. (Нижний Новгород, 07 декабря 2009 г.). Н. Новгород: Изд-во НГТУ, 2011. 141 с.
3. Анисимов Я. Ф., Васильев Е. П. Электромагнитная совместимость полупроводниковых преобразователей и судовых электроустановок. Л.: Судостроение, 1990. 264 c.
4. Грин А. В. Фильтрокомпенсирующие устройства для обеспечения электромагнитной совместимости в электро-технических комплексах с вентильной нагрузкой: дис. … канд. техн. наук. СПб., 1998. 177 с.
5. Запальский В. Н., Запальский К. Н. Влияние отклонения напряжения и частоты на качество электроснабжения морского подвижного объекта // Вестн. Кременчуг. гос. политех. ун-та им. М. Остроградского. 2009. Вып. 3 (56). С. 56.
6. Вагин Г. Я., Лоскутов А. Б., Севостьянов А. А., Юртаев С. Н. К вопросу о влиянии кондуктивных помех на электроприемники, элементы систем электроснабжения, управления и защиты // Пром. энергетика. 2012. № 5. С. 27–31.
7. Лебедев В. В., Коробко Г. И. Влияние высших гармоник на работу судового электрооборудования и способы их снижения // Великие реки: тр. 14-го Междунар. науч.-пром. форума (Нижний Новгород, 15–18 мая 2012 г.). Н. Новгород: Изд-во ВГАВТ, 2012. Т. 2. С. 261–264.
8. Измерение и устранение гармоник // Техн. коллекция Schneider Electric. 2009. № 30. 48 с.
9. Коробко Г. И., Лебедев В. В., Ахлестин П. В. Использования принципа вольтодобавки для компенсации нели-нейных искажений напряжения // Вестн. Волж. гос. акад. вод. трансп. 2015. № 43. С. 303–307.
10. Хватов О. С., Кобяков Д. С. Моделирование переходных процессов дизель-генераторной установки переменной частоты вращения на базе активного выпрямителя напряжения // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техни-ка и технология. 2019. № 3. С. 94–104.
11. Дьяконов В. П., Пеньков А. А. MATLAB и Simulink в электроэнергетике: справ. М.: Горячая линия – Телеком, 2009. 816 с.
12. Карташев И. И., Тульский В. Н., Шамонов Р. Г. и др. Управление качеством электроэнергии / под ред. Ю. В. Шарова. М.: Изд-во МЭИ, 2006. 319 с.
13. Свидетельство о государственной регистрации программы для ЭВМ № 2014613892 Рос. Федерация. Расчет коэффициента нелинейных искажений напряжения судовой сети в динамических режимах / Лебедев В. В., Коробко Г. И., Попов С. В.; 09.04.2014.
14. Агунов А. В. Методология и принципы построения систем управления параметрами качества электрической энергии в судовых электроэнергетических системах с нелинейными элементами: дис. … д-ра техн. наук. СПб., 2004. 186 с.
15. Лебедев В. В., Коробко Г. И., Попов С. В. Устройство выделения высших гармоник для системы компенсации нелинейных искажений напряжения // Актуальные проблемы электроэнергетики: материалы науч.-техн. конф. (Нижний Новгород, 17–18 декабря 2012 г.). Н. Новгород: Изд-во НГТУ, 2012. С. 168–172.
