












Russian Federation
Russian Federation
Russian Federation
Russian Federation
. Nonlinear consumers of electrical energy of significant capacity when operating as part of a single marine electric power system (MEPS) have a strong impact on the quality of the generated voltage, which is characterized by various electrical parameters, including the coefficient of nonlinear distortion (KND). When powered from such a network, distortion of signals from radio navigation equipment and control systems may occur, reducing efficiency of electric motors, generator equipment and electric energy consumers, deterioration of cable networks, etc. By changing active and passive methods of compensating for nonlinear voltage distortions, the influence of nonlinear electric power consumers on the voltage quality of the generated electric power at the MEPS can be reduced. One of the effective ways of compensation is the use of an active nonlinear distortion compensator, which allows you to reduce the KND to values of 4-5%. The use of a two-channel measurement and control system in an active compensator based on a voltage-boosting device is an effective way to compensate for nonlinear distortions. A new, different from the known, block diagram of the nonlinear distortion compensator is proposed, on the basis of which a simulation model of the ship's electric power system was developed in the Simulink application package of the MatLab graphical simulation environment. Simulation modeling has shown that the use of a two-channel control and measurement system makes it possible to reduce the level of nonlinear voltage distortion of the generated electricity to 2-3%, with the power of nonlinear consumers not exceeding 60% of the power source. Increasing the power of the voltage-add transformer of the active compensator under the same conditions makes it possible to reduce the coefficient of nonlinear distortion by 0.5%.
voltage quality, ship power station, nonlinear distortions in voltage, responsible consumers, active compensator of voltage harmonics, voltodustaving device, voltodustable transformer, two-channel measurement and control system
Введение
При работе нелинейных потребителей на общую судовую сеть возникают нелинейные искажения (НИ) напряжения, которые оцениваются различными параметрами, в том числе коэффициентом KНИ. При значениях KНИ более 10 % могут возникать перебои в работе радионавигационных систем, интегрированных автоматических систем управления, происходит снижение коэффициента полезного действия электродвигателей и генераторов, снижается срок службы судовых кабельных сетей и т. д. [1–8]. В судовых электроэнергетических системах (СЭЭС), где мощность отдельных нелинейных потребителей не превышает 30 % от мощности генераторов, к примеру на сухогрузных судах, KНИ достигает значений 14–15 % [7]. На нефтеналивных судах, судах с гребной электрической установкой, где нелинейные потребители имеют мощность 55–65 % от мощности генераторов, KНИ может достигать 20–25 %. Компенсация таких значений KНИ до требуемых Российским морским регистром судоходства стандартными средствами (пассивные фильтры, стабилизаторы и т. д.) практически невозможна. В таком случае применяют другие устройства улучшения качества напряжения. Одним из таких устройств может являться активный компенсатор (АК), собранный на базе вольтодобавочного устройства (ВДУ) с двухканальной системой измерения и управления.
Методы исследований
Известны математические модели измерения и управления АК с одноканальной системой измерения [9, 10]. С использованием структурной схемы АК с одноканальной системой управления и измерения была разработана структурная схема АК с двухканальной системой измерения и управления. Модель АК разработана в прикладном пакете Simulink графической среды имитационного моделирования MatLab [11]. Выполнены исследования моделирования для двух вариантов АК и произведен сравнительный анализ полученных результатов. Проведен сравнительный анализ результатов моделирования АК с двухканальной системой измерения и управления с различными коэффициентами усиления и мощностями вольтодобавочных трансформаторов.
Описание системы
На рис. 1 представлена функциональная схема судовой системы распределения электроэнергии с АК на базе ВДУ с двухканальной системой измерения и управления. Она состоит из двух синхронных генераторов – Г1 и Г2, главного распределительного электрического щита (ГРЭЩ), АК, потребителей П1 и П2.
В первую группу (П1) входят потребители, на работу которых качество напряжения влияет несущественно. К ним можно отнести электроприводы с частотными преобразователями или с системами лавного пуска, электрический обогрев и т. д. Ко второй группе потребителей (П2) относятся ответственные потребители, стабильная работа которых зависит от качества питающего напряжения, поэтому они подключаются через АК НИ [12–15]. К ответственным за живучесть судна можно отнести потребителей:
– с нелинейной нагрузкой (НН): радионавигационная аппаратура, комплексная система управления судном и прочее оборудование;
– с линейной нагрузкой (ЛН): релейные системы управления пускателей наиболее ответственных потребителей, таких как пожарные и балластно-осушительные насосы.
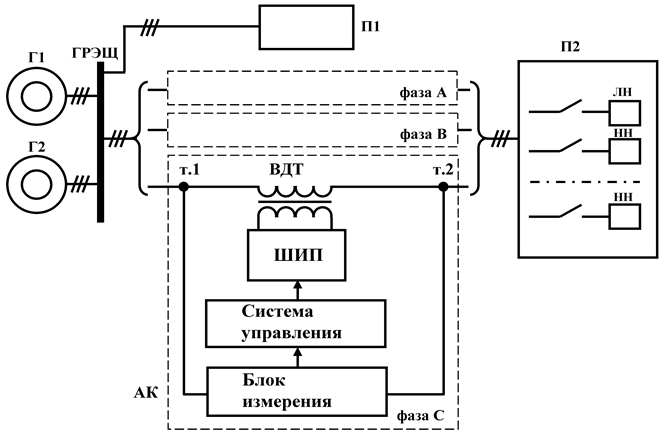
Рис. 1. Функциональная схема судовой системы распределения электроэнергии с активным компенсатором
Fig. 1. Functional diagram of the ship's power distribution system with an active compensator
Рассмотрим работу блоков АК высших гармоник напряжения на базе ВДУ с двухканальной системой измерения и управления (см. рис. 1). Блок измерения анализирует напряжение на входе ВДУ – основной сигнал (т. 1) и напряжение на выходе ВДУ – корректирующий сигнал (т. 2). Эти сигналы суммируются, а результат поступает в блок управления широтно-импульсным преобразователем (ШИП). Система управления формирует четырехтактный сигнал для управления ШИП. Трехканальный ШИП обеспечивает формирование переменного напряжения необходимой формы из постоянного. Вольтодобавочный трансформатор (ВДТ) устанавливается в каждой фазе и обеспечивает передачу гармоник напряжения от ШИП в судовую сеть.
Структурная схема компенсатора с двухканальной системой измерения и управления представлена на рис. 2. Компенсатор формирует напряжение, форма которого компенсирует высшие гармонические напряжения в судовой сети. Система управления и измерения АК состоит их двух каналов – основного, который включает в себя усилитель Ку1, фильтр Ф1 и сумматор СУ1, и корректирующего – Ку2, Ф2, СУ2 соответственно.
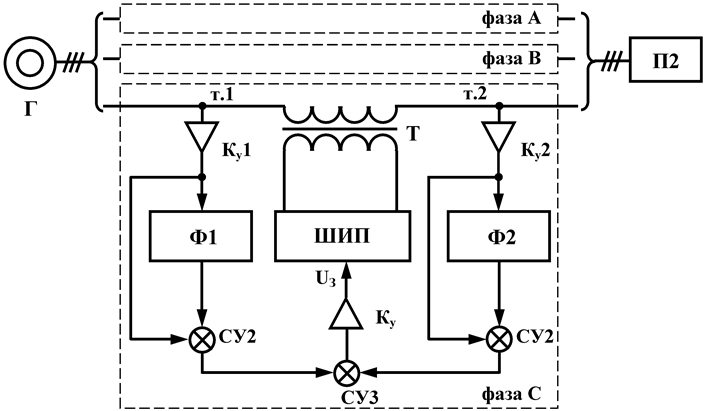
Рис. 2. Структурная схема двухконтурной системы измерения и управления
Fig. 2. Block diagram of a two-circuit measurement and control system
Основной канал формирует сигнал управления ШИП, который компенсирует большую часть НИ. Корректирующий канал измеряет остаточный коэффициент НИ после ВДУ в т. 2 и формирует сигнал компенсации задающего воздействия ШИП для корректировки. Результирующий сигнал компенсации формируется сложением сигналов основного и корректирующего блоков на сумматоре СУ3. Этот сигнал преобразуется усилителем Ку и является сигналом задания UЗ для управления ШИП. Коэффициенты усиления Ку1 и Ку2, а также параметры фильтров Ф1 и Ф2 настраиваются для каждого блока индивидуально с целью получения максимальной степени компенсации НИ.
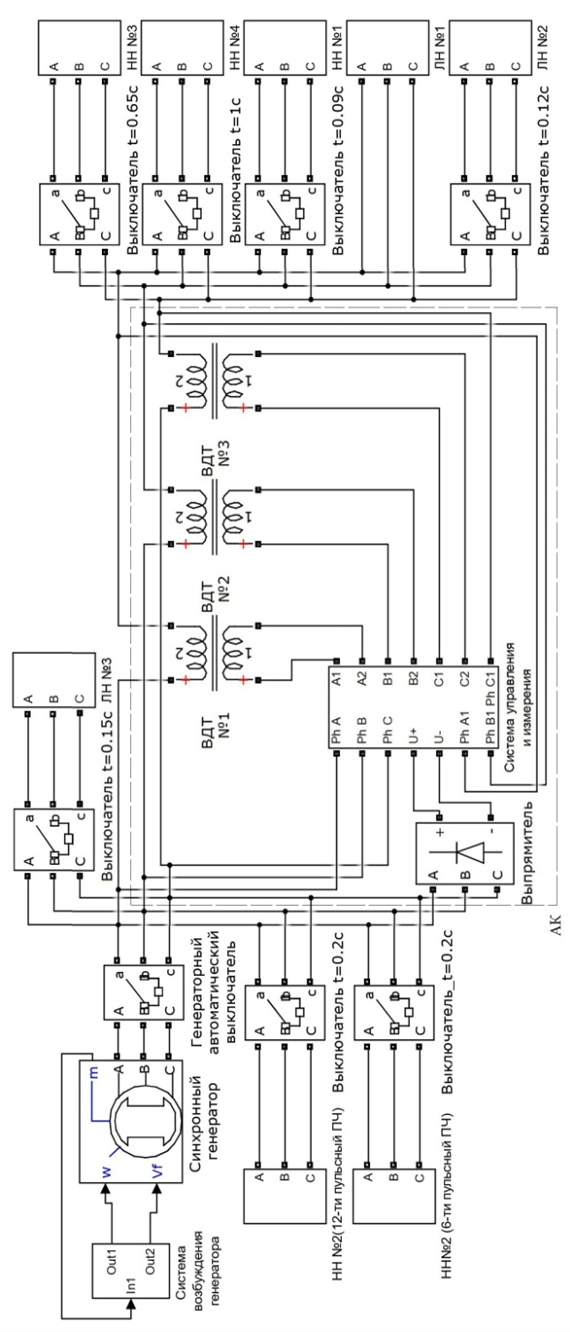
На рис. 3 представлена модель электроэнергетических систем SimPowerSystem на основе структурной схемы (см. рис. 1), выполненная в графической среде имитационного моделирования Simulink.
Модель состоит из силовой части, реализованной на эквивалентном генераторе; ЛН, включаемой после запуска генератора; ЛН, включаемых в заданный момент времени с помощью выключателей; НН, подключаемых в заданный момент времени; АК.
Силовая часть модели выполнена на базе эквивалентного синхронного генератора мощностью 250 кВА с системой регулирования выходного напряжения [10]. Линейная нагрузка выполнена в виде трех блоков с мощностями: 5 кВА (включается после запуска генератора), 17,5 и 25 кВА, включаемых в периоды времени 0,12 и 0,15 с соответственно.
Активный компенсатор собран из блока выпрямителя, системы измерения и управления, ШИМ-контроллера и ВДТ № 1–3. Нелинейная нагрузка представлена несколькими блоками и подключается к сети в определенные моменты времени:
– мощностью 95 кВА (6-пульсный преобразователь частоты (ПЧ) подключается к судовой сети при 0,2 с);
– мощностью 95 кВА (12-пульсный ПЧ подключается к судовой сети при 0,2 с);
– три блока мощностью по 20 кВА, включаемые через промежутки времени 0,09, 0,65 и 1 с.
На рис. 4 приведена модель системы управления и измерения с ШИП. В отличие от одноканальной системы управления [9], схема имеет два измерительных трансформатора (ИТ1, ИТ2), с которых поступает информация в систему измерения и управления (СИ и У). В блоке СИ и У входные сигналы суммируются, а на выходе формируется общий сигнал управления ШИП.
В результате моделирования АК с новой двухканальной системой управления и измерения построены диаграммы значений KНИ при различных коэффициентах усиления регуляторов (рис. 5).
Согласно диаграмме (рис. 5) при увеличении Ку1 (от 10 и более) KНИ уменьшается, а при достижении значения Ку = 23 наблюдается обратный эффект – KНИ начинает повышаться. Для наглядности на диаграмме (рис. 5) показано изменение KНИ при КУ = 37. Дальнейшее увеличение значения КУ не имеет смысла.
Для сравнения значений KНИ при работе систем управления с одноканальной системой измерения и двухканальной была собрана модель, позволяющая выполнить одновременный запуск двух систем с изменяющейся мощностью нагрузки РНН.
|
Рис. 3. Модель судовой электростанции с активным компенсатором Fig. 3. Model of a marine power plant with an active compensator |

|
Рис. 4. Модель системы управления и измерения с ШИП Fig. 4. Model of the control and measurement system with PWM |
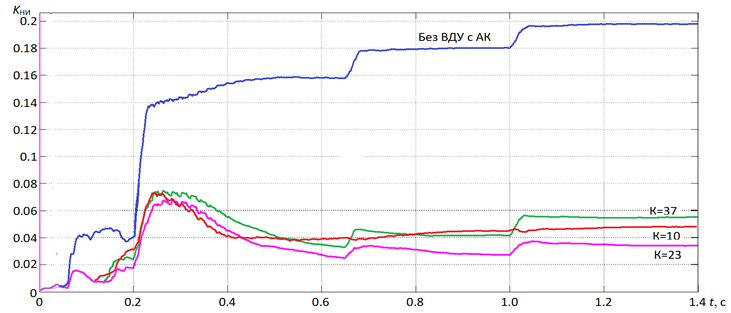
Рис. 5. Диаграмма значений KНИ при различных коэффициентах усиления системы измерения
в активном компенсаторе
Fig. 5. Diagram of the values of the KND at different amplification coefficients of the measurement system
in the active compensator
Сравнительный анализ диаграмм (рис. 6) доказывает, что в момент подключения (0,2 с) НН большой мощности (95 кВА) к генератору мощностью 250 кВА происходит рост значения KНИ обеих систем. Однако спустя 0,05 с значение KНИ одноканальной системы резко снижается, что свидетельствует о вступлении системы в действие, а двухканальной – остается на том же уровне. Отметим, что в двухканальной системе регулирования наблюдаются автоколебания, которые продолжаются в течение 0,1 с. В дальнейшем KНИ снижается, достигая значения ниже, чем в одноканальной системе.
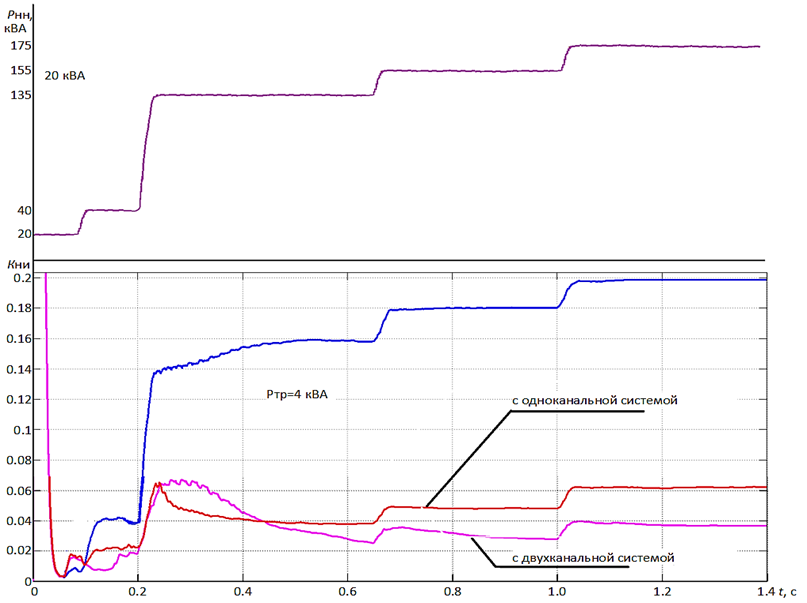
Рис. 6. Диаграмма значений KНИ с одноканальной и двухканальной системами измерения
в активном компенсаторе
Fig. 6. Diagram of the values of KND with a single-channel and two-channel measurement systems
in the active compensator
Наброс нагрузки меньшей мощности не вызывает подобных колебательных процессов, а KНИ имеет пониженное значение по сравнению с одноканальной системой регулирования. Следует отметить, что автоколебания возникают при превышении соотношения мощности НН к мощности генератора более чем 1 : 3.
На диаграмме рис. 7 показано изменение KНИ при разной мощности ВДТ АК. Было замечено, что повышение мощности ВДТ несколько снижает значение KНИ, однако этот процесс имеет тенденцию к замедлению при достижении мощности ВДТ 6,3 кВА и более.
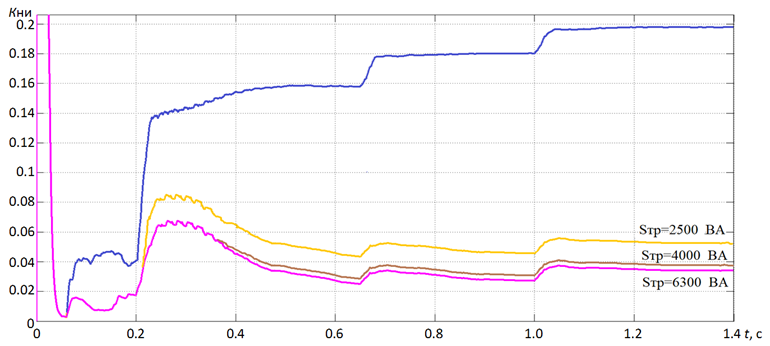
Рис. 7. Диаграмма значений KНИ при разной мощности вольтодобавочных трансформаторов
активного компенсатора
Fig. 7. Diagram of the values of the KND at different power supply voltage transformers of the active compensator
Заключение
Разработана имитационная модель АК нелинейных искажений в программе MatLab, которая учитывает соотношение мощностей нагрузки, в том числе нелинейного характера, и мощности АК. Предложенная структура и алгоритм работы АК являются новыми и отличаются от известных одноканальных систем компенсирования. Модель АК позволяет выполнить настройку системы регулирования АК для достижения минимальных значений KНИ в судовой сети. Для двухканальной системы регулирования определены коэффициенты усиления и мощность ВДТ, обеспечивающие снижение KНИ в установившемся режиме работы в 1,5–2 раза.
1. Sheinikhovich V. V. Kachestvo elektricheskoi energii na sudakh: spravochnik [The quality of electrical energy on ships: a reference book]. Leningrad, Sudostroenie Publ., 1988. 160 p.
2. Gruntovich N. V., Alferov A. A. Analiz vliianiia vysshikh garmonik na nadezh-nost' ekspluatatsii kabel'nykh linii. Ak-tual'nye problemy elektroenergetiki [Analysis of the influence of higher harmonics on the reliability of cable lines. Current problems of the electric power industry]. Materialy nauchno-tekhnicheskoi konferentsii (Nizhnii Novgorod, 07 dekabria 2009 g.). Nizhnii Novgorod, Izd-vo NGTU, 2011. 141 p.
3. Anisimov Ia. F., Vasil'ev E. P. Elektromagnitnaia sovmestimost' poluprovodnikovykh preobrazovatelei i sudovykh el-ektroustanovok [Electromagnetic compatibility of semiconductor converters and marine electrical installations]. Leningrad, Su-dostroenie Publ., 1990. 264 p.
4. Grin A. V. Fil'trokompensiruiushchie ustroistva dlia obespecheniia elektromagnitnoi sovmestimosti v elektro-tekhnicheskikh kompleksakh s ventil'noi nagruzkoi: dis. … kand. tekhn. nauk [Filter compensating devices for ensuring electro-magnetic compatibility in electrical engineering complexes with valve load: dis. ... Candidate of Technical Sciences]. Saint Pe-tersburg, 1998. 177 p.
5. Zapal'skii V. N., Zapal'skii K. N. Vliianie otkloneniia napriazheniia i chastoty na kachestvo elektrosnabzheniia morskogo podvizhnogo ob"ekta [The effect of voltage and frequency deviation on the quality of power supply to an offshore mobile facili-ty]. Vestnik Kremenchugskogo gosudarstvennogo politekhnicheskogo universiteta imeni M. Ostrogradskogo, 2009, iss. 3 (56), p. 56.
6. Vagin G. Ia., Loskutov A. B., Sevost'ianov A. A., Iurtaev S. N. K voprosu o vliianii konduktivnykh pomekh na elektro-priemniki, elementy sistem elektrosnabzheniia, upravleniia i zashchity [On the issue of the influence of conductive interference on electrical receivers, elements of power supply, control and protection systems]. Promyshlennaia energetika, 2012, no. 5, pp. 27-31.
7. Lebedev V. V., Korobko G. I. Vliianie vysshikh garmonik na rabotu sudovogo elektrooborudovaniia i sposoby ikh snizheniia. Velikie reki [The influence of higher harmonics on the operation of marine electrical equipment and ways to reduce them. Great rivers]. Trudy 14-go Mezhdunarodnogo nauchno-promyshlennogo foruma (Nizhnii Novgorod, 15–18 maia 2012 g.). Nizhnii Novgorod, Izd-vo VGAVT, 2012. Vol. 2. Pp. 261-264.
8. Izmerenie i ustranenie garmonik [Measuring and eliminating harmonics]. Tekhnicheskaia kollektsiia Schneider Electric, 2009, no. 30, 48 p.
9. Korobko G. I., Lebedev V. V., Akhlestin P. V. Ispol'zovaniia printsipa vol'todobavki dlia kompensatsii nelineinykh is-kazhenii napriazheniia [Using the principle of voltage boost to compensate for nonlinear voltage distortions]. Vestnik Volzhskoi gosudarstvennoi akademii vodnogo transporta, 2015, no. 43, pp. 303-307.
10. Khvatov O. S., Kobiakov D. S. Modelirovanie perekhodnykh protsessov dizel'-generatornoi ustanovki peremennoi chastoty vrashcheniia na baze aktivnogo vy-priamitelia napriazheniia [Simulation of transient processes of a diesel generator set with variable speed based on an active voltage rectifier]. Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Morskaia tekhnika i tekhnologiia, 2019, no. 3, pp. 94-104.
11. D'iakonov V. P., Pen'kov A. A. MATLAB i Simulink v elektroenergetike: spravochnik [MATLAB and Simulink in the electric power industry: a reference book]. Moscow, Goriachaia liniia – Telekom Publ., 2009. 816 p.
12. Kartashev I. I., Tul'skii V. N., Shamonov R. G. i dr. Upravlenie kachestvom elektroenergii [Electricity quality manage-ment]. Pod redaktsiei Iu. V. Sharova. Moscow, Izd-vo MEI, 2006. 319 p.
13. Lebedev V. V., Korobko G. I., Popov S. V. Raschet koeffitsienta nelineinykh iskazhenii napriazheniia sudovoi seti v dinamicheskikh rezhimakh [Calculation of the coefficient of nonlinear voltage distortion of the ship's network in dynamic modes]. Svidetel'stvo o gosudarstvennoi registratsii programmy dlia EVM № 2014613892, 09.04.2014.
14. Agunov A. V. Metodologiia i printsipy postroeniia sistem upravleniia parametrami kachestva elektricheskoi energii v sudovykh elektroenergeticheskikh sistemakh s nelinei-nymi elementami: dis. … d-ra tekhn. nauk [Methodology and principles of building control systems for electrical energy quality parameters in marine electric power systems with nonlinear elements: dis. ... Doctor of Technical Sciences]. Saint Petersburg, 2004. 186 p.
15. Lebedev V. V., Korobko G. I., Popov S. V. Ustroistvo vydeleniia vysshikh garmonik dlia sistemy kompensatsii nelineinykh iskazhenii napriazheniia. Aktual'nye problemy elektroenergetiki [A device for extracting higher harmonics for a nonlinear voltage distortion compensation system. Actual problems of the electric power industry]. Materialy nauchno-tekhnicheskoi konferentsii (Nizhnii Novgorod, 17–18 dekabria 2012 g.). Nizhnii Novgorod, Izd-vo NGTU, 2012. Pp. 168-172.
