












Россия
Россия
Россия
Рассматриваются и исследуются дейдвудные подшипники, которые служат опорами для гребных валов валопровода судна. Указаны основные геометрические и механические параметры дейдвудных подшипников. Отмечается, что решение о выборе материала и геометрических размерах дейдвудных подшипников, помимо условий эксплуатации судна, принимают на основании требований нормативно-регламентирующих документов и с учетом полученных результатов статических и динамических расчетов при проектировании судового валопровода и его вспомогательных элементов. Проводится статический расчет балки длиной L применительно к судовым валопроводам. Отмечается, что рабочее состояние валопровода и всей судовой энергетической установки судна зависит от зазора между облицовочными слоями гребного вала и антифрикционного материала дейдвудного подшипника, который при износе последнего увеличивается. Для проведения статического расчета используется метод начальных параметров. На основании граничных условий исследуемой балки получена система неоднородных уравнений. Представлен общий подход статического расчета балки, которая опирается на шарнирные опоры, смещенные относительно оси балки на величину Δ. Указывается, что смещение опор относительно оси балки моделирует величину износа антифрикционного материала дейдвудного подшипника. На основании полученных результатов дана оценка влияния износа дейдвудного подшипника на напряженное состояние валопровода и на загруженность опорных подшипников. Представлена форма излома гребного вала в процессе крутильных колебаний. Указывается, что динамический расчет на поперечные и крутильные колебания является заключительным и проверочным этапом при проектировании судового валопровода и его вспомогательных элементов.
статика, прогиб балки, износ, смещение опор, гребной вал, резонанс, дейдвудный подшипник
Введение
Дейдвудные подшипники, как подшипники скольжения, являются протяженными опорами гребного вала, которые входят в общую валовую систему судового валопровода. Они воспринимают ряд случайных, постоянных, переменных и циклических нагрузок, действующих со стороны самого гребного вала и гребного винта [1–3]. В процессе движения судна значения таких нагрузок могут превышать расчетные, принимаемые при проектировании всего судового валопровода, в 2–3 раза. В качестве антифрикционного слоя, который располагается внутри корпуса дейдвудного подшипника, используют как металлические, так и неметаллические материалы. Среди металлических материалов широкое применение нашел баббит, механические свойства которого должны соответствовать ГОСТ 1320-74 «Баббиты оловянные и свинцовые. Технические условия» [4]. Среди неметаллических дейдвудных подшипников в большинстве случаев используют капролон и резину [5–8].
Дейдвудные подшипники гребных валов, помимо содержания антифрикционных материалов, различаются и по другим признакам, например [7, 9–11]:
– по месту расположения – встроенные (полностью размещены в корпусе судна) и подвесные (крепятся вне корпуса на кронштейне);
– по количеству дейдвудных подшипников на гребном валу (обычно один кормовой или два – носовой и кормовой);
– по схеме набора антифрикционного материала: «бочка», «ласточкин хвост», цельные и разъемные втулки;
– по характеру циркуляции рабочей жидкости: принудительные, естественные, самопрокачка;
– по наличию средств защиты дейдвудных подшипников от влияния неблагоприятных эксплуатационных факторов (мелководья, намоток на винт, удары о лед).
Выбор материала и геометрические размеры дейдвудных подшипников, помимо условий эксплуатации судна, зависит от требований нормативно-регламентирующих документов и полученных результатов статических и динамических расчетов при проектировании судового валопровода и его вспомогательных элементов [12, 13].
Материалы исследования
При проектировании валопровода расчетная схема представляет собой статически неопределимую неразрезную балку, которая опирается только на шарнирные опоры. На правом конце исследуемой балки расположена защемленная опора. Она в расчетной схеме моделирует упорный подшипник. Балка нагружена распределенной (q) и сосредоточенной (F) нагрузками. Сосредоточенная нагрузка расположена на левом конце балки соответственно. Вышеуказанные внешние нагрузки характеризуют вес валопровода и гребного винта. Шарнирные опоры моделируют дейдвудные и промежуточные подшипники. Для определения реакций в опорах многопролетной балки используют уравнение трех моментов [4].
Одним из критериев рабочего состояния дейдвудного подшипника является износ Δ антифрикционного материала, который влияет на неравномерность нагружения всех опорных подшипников судового валопровода. Повышенный износ дейдвудного подшипника приводит к возникновению поперечных, крутильных и продольных колебаний валопровода [2, 14]. Следует отметить, что динамический расчет на поперечные и крутильные колебания является заключительным и проверочным этапом при проектировании судового валопровода и его вспомогательных элементов. Одним из условий динамического расчета является отстройка от резонансного состояния, т. е. полученная собственная частота валопровода должна на 20–40 % превышать рабочую частоту. На рис. 1 представлен излом гребного вала под углом примерно 45°, возникший при повышенном износе кормового дейдвудного подшипника речного судна.

Рис. 1. Излом гребного вала речного судна
Fig. 1. Fracture of the propeller shaft of a river vessel
Форма излома вышеприведенного гребного вала свидетельствует о возникновении крутильных колебаний.
Расчет балки методом уравнений деформаций
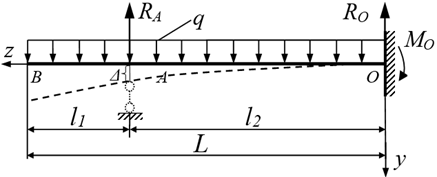
В качестве оценки влияния износа Δ дейдвудного подшипника на рабочее состояние судового валопровода рассмотрим балку с общей длиной L и постоянной по длине сечения, которая опирается на одну шарнирно-подвижную опору, моделирующую кормовой дейдвудный подшипник. На правом конце в точке O имеется защемленная опора. Расстояние между двумя опорами составляет l2. По всей длине балки действует распределенная нагрузка q, которая, в свою очередь, моделирует вес гребного вала. Расчетная схема исследуемой балки с распределенной нагрузкой представлена на рис. 2, а. На первом этапе исследования будем считать вес гребного винта F незначительным.
Рассмотрим расчетную схему балки, которая представлена на рис. 2, а. Приняв начало координат в точке 0 (место расположения защемленной опоры), запишем граничные условия:
 (1)
(1)

а
б

в

г
Рис. 2. Расчетные схемы балки: а – основная расчетная система; б – общий вид смещения шарнирной опоры;
в – расчетная схема балки при X = 0; г – расчетная схема балки при q = 0
Fig. 2. Design schemes of the beam: а – the main settlement system; б – general view of the joint support mixing;
в – design scheme of the beam at X = 0; г – design scheme of the beam at q = 0
Для определения реакций и линии прогиба балки с учетом смещения шарнирной опоры в точке А воспользуемся методом уравнения деформаций (уравнениями перемещений). Метод сравнений деформаций сводится к определению прогиба рассчитываемой многопролетной (статической неопределимой) балки, освобождается от дополнительных связей и заменяется действием неизвестных реакций [15]. Новая исследуемая расчетная схема преобразовывается уже, как правило, в статически определимую (основную) систему. Условием же отличия основной системы от заданной является равенство нулю перемещения сечений в местах удаленных связей по направлению приложенных здесь неизвестных реакций. Эти уравнения, выражающие условия совместимости перемещений основной системы со связями, наложенными на исследуемую статически неопределимую систему балки, и будут являться решением поставленной задачи.
Исходя из вышесказанного и полученной нами исследуемой расчетной схемы, рассмотрим далее уже две расчетные схемы:
– в виде консольной балки, нагруженной только внешней распределенной нагрузкой q (см. рис. 2, в), неизвестная сосредоточенная сила равна нулю (Х = 0);
– в виде консольной балки, нагруженной только неизвестной сосредоточенной нагрузкой Х в точке А (см. рис. 2, г).
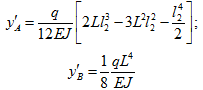
В табл. 1 представлены уравнения линии прогиба балки исследуемых расчетных схем и выражения прогиба в исследуемых точках.
Таблица 1
Table 1
Уравнение упругой линии балки*
Elastic line equation of the beam
|
Расчетные схемы |
Реакция и изгибающий момент в точке 0 |
Уравнение упругой q линии |
Выражение прогиба |
|
Рис. 2, в |
 |
 |
 |
|
Рис. 2, г |
 |
|
 |

* Составлено по [15, 16].
Прогиб в точке A по направлению неизвестной сосредоточенной силы равна зазору Δ [15]:
 (2)
(2)
Из полученного уравнения (2) получаем выражение определения X:

Принимая во внимание условие:
RA = X,
составляем выражения для определения граничных условий в защемленной и шарнирно-подвижной опорах основной системы относительно:
 (3)
(3)
Полученные выражения (3) позволяют определить реакции и изгибающий момент балки с учетом смещения шарнирно-подвижной опоры в точке А на величину Δ.
Расчет балки уравнением трех моментов
Уравнение трех моментов (метод Клайперона) получается из канонических уравнений на основании метода сил [15, 16], если только в качестве неизвестных принимаются опорные моменты. Данный способ решения статически неопределимых неразрезных балок устанавливает зависимость между тремя моментами в сечениях над соседними опорами. При действии на балку внешних нагрузок уравнение имеет следующий вид:
 (4)
(4)
где ωn и ωn+1 – площади диаграммы изгибающих моментов для пролетов; an – горизонтальное расстояние между центром тяжести площади эпюры изгибающего момента пролета ln и опорой n – 1; bn+1 – горизонтальное расстояние между центром тяжести площади эпюры изгибающего момента пролета ln+1 и опорой n + 1.
Вышеприведенное уравнение (4) может быть использовано при расчете неразрезных балок в случае следующих ограничений:
– все опоры неразрезной балки должны лежать на одной прямой линии;
– все опоры считаются абсолютно жесткими (податливость равна нулю), т. е. неподвижными в вертикальном направлении.
Для определения реакций исследуемой расчетной схемы балки выбираем основную систему, которая представлена на рис. 3 [15]. Защемленная опора в точке B заменена на фиктивный пролет.
На основании полученной основной расчетной системы балки с учетом действия распределенной нагрузки изгибающий момент в опорах в точках 0 и 2 примут вид [15]:
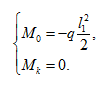 (5)
(5)
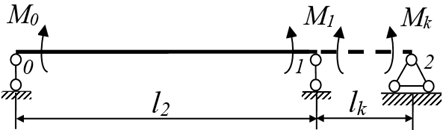
Рис. 3. Расчетная схема балки на шарнирной опоре
Fig. 3. Design diagram of a beam on a hinged support
Далее строим эпюры изгибающих моментов от действия заданной внешней нагрузки на каждом участке основной системы. В нашем случае эпюра изгибающего момента (в виде параболы) пролета длиной l2 балки эквивалентной системы от действия распределенной системы q представлена на рис. 4.

Рис. 4. Общий вид эпюры изгибающего момента на пролете длиной l2: ц. т. – центр тяжести
Fig. 4. General view of the bending moment diagram over a span of length l2: ц. т. – center of gravity
Уравнение 3-х моментов (4) для исследуемой расчетной схемы относительно опоры 1 (точка А основной расчетной схемы) примет следующий вид:
 (6)
(6)
Принимая во внимание (5), преобразуем уравнение (6):
![]()
откуда получаем выражение для определения изгибающего момента M1 в шарнирной опоре 1 основной системы:

Отсюда получим выражения определения каждой реакции опоры исследуемой расчетной схемы (см. рис. 2, а):
– реакция RA:
– реакция RB:
![]()
Полученные выражения позволяют определить максимальное значение реакций, когда опоры расположены по одной оси балки в опорах, т. е. Δ = 0. Минимальные же значения реакций будут определены на основании исследуемой расчетной схемы, которая представлена на рис. 2, в. Значение предельного допустимого значения зазора также основывается в определении прогиба в точке консольной балки (см. рис. 1, в), Δmax = y'A. То есть диапазон зазора имеет следующее выражение:
![]()
Расчет балки методом начальных параметров с учетом смещения опор
Как видно из вышеприведенного анализа, определение прогиба балки с учетом смещения опоры несколькими широко известными методами представляет собой сложную задачу, поэтому в целях упрощения решения задачи рекомендуется использовать метод начальных параметров.
Для определения прогиба балки по всей ее длине и граничных условий в опорах воспользуемся методом начальных параметров, принимая во внимание начало координат [10, 15–17]:
 (7)
(7)
где y0 и φ0 – прогиб и угол поворота в начале координат балки; M0 – изгибающий момент в начальном сечении; R0 – поперечная сила в том же сечении; M и P – изгибающий момент и сила, действующие на участке балки; q – распределенная нагрузка, действующая на всей длине балки.
Исследуемый метода расчета балки (метод начальных параметров) позволяет применять одно уравнение прогибов (или углов поворота сечений), пригодное для всех участков балки постоянного или переменного сечения, поэтому это уравнение называется еще универсальным или обобщенным. Полученное уравнение (в форме, предложенной А. П. Коро-бовым) учитывает действия всех основных типов внешних нагрузок – сосредоточенный момент, сосредоточенную силу, распределенную нагрузку постоянной или переменной интенсивности.
На основании граничных условий (1), величины смещения шарнирной опоры на величину Δ и уравнения (7) получим систему уравнений:
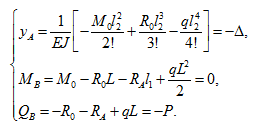 (8)
(8)
Далее из полученной системы уравнений (8) определяем реакции R0, RA и изгибающий момент M0 в опорах исследуемой расчетной схемы относительно Δ (см. рис. 1):

На основании вышеприведенного уравнения (7) выражение прогиба исследуемой балки в точке В будет иметь следующий вид:
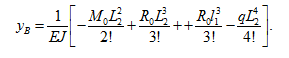 (9)
(9)
В качестве примера рассмотрим гребной вал судна со следующими заданными параметрами расчетной схемы (см. рис. 1, б): q = 0,7 кН/м; l1 = 0,6 м; l2 = 1,9 м; L = 2,5 м. Диаметр гребного вала принимаем равным dгр = 100 мм. На начальном этапе исследования весом гребного винта будем пренебрегать. Изгибная жесткость балки будет иметь следующее численное значение: EJ = 1,05‧106 H‧м2.
Таким образом,

В табл. 2 представлены результаты расчета определения реакций и изгибающего момента в опорах балки, полученные с использованием уравнений деформаций (расчет № 1) и с предлагаемым подходом методом начальных параметров (расчет № 2).
Согласно полученным значениям в таблице, предлагаемый подход статического расчета методом начальных параметров с учетом смещения опоры относительно оси балки на величину Δ дает точные результаты в определении геометрических и механических параметров исследуемой балки.
На рис. 5 представлен график численного изменения статического прогиба (yB) на конце балки в точке B с учетом максимального и минимального значений, а также предельного значения смещения шарнирно-подвижной опоры, моделирующей дейдвудный подшипник.
Таблица 2
Table 2
Результаты статического расчета балки
The results of the static beam calculation
|
Δ |
Расчет № 1 |
Расчет № 2 |
R0, Н (max) |
RA, Н (max) |
M0, Н‧м (max) |
R0, Н (min) |
RA, Н (min) |
M0, Н‧м (min) |
||||
|
R0, Н |
RA, Н |
M0, Н‧м |
R0, Н |
RA, Н |
M0, Н‧м |
|||||||
|
0 |
731,78 |
1 018,22 |
–252,88 |
731,8 |
1 018,2 |
–252,9 |
731,78 |
1 018,22 |
–252,88 |
1 750,00 |
0 |
–2 187,5 |
|
0,58 |
992,6 |
757,4 |
–748,4 |
992,6 |
757,4 |
–748,4 |
||||||
|
1,14 |
1 253,4 |
496,7 |
–1 243,9 |
1 253,4 |
496,7 |
–1 243,9 |
||||||
|
1,7 |
1 514,2 |
235,8 |
–1 739,4 |
1 514,2 |
235,8 |
–1 739,4 |
||||||
|
2,21 |
1 749,9 |
0 |
–2 187,5 |
1 749,9 |
0 |
–2 187,5 |
||||||

Рис. 5. График yB = –f (Δ): ряд 1 – yB на основании выражения (9); ряд 2 – yB = yBmax
Fig. 5. Graph yB = – f (Δ): row 1 – yВ based on expression (9); row 2 – yB = yBmax
Таким образом, можно сделать общий вывод о том, что при износе дейдвудного подшипника прогиб гребного вала на месте расположения гребного винта увеличивается, что в итоге приводит к снижению собственной частоты валопровода, т. к. вследствие износа зазор в подшипнике увеличивается и оказывает влияние на уменьшение жесткости валопровода в целом.
Заключение
Предлагаемый подход статического расчета определения прогиба балки с учетом смещения опор методом начальных параметров позволяет оценить влияние износа дейдвудного подшипника на нагруженность всех опорных подшипников судового валопровода, определить численное значение предельной величины износа дейдвудных подшипников для конкретного гребного вала в зависимости от его геометрических размеров и расположения в дейдвудной трубе корпуса судна дейдвудных подшипников, а также действия внешних нагрузок.
1. Гаращенко П. А. Работоспособность судовых валопроводов различной жесткости // Вестн. Астрахан. гос. техн. ун-та. 2006. № 2 (31). С. 191–195.
2. Коперчак О. П., Халилов Н. А. Влияние колебательных процессов на надежность валопроводов морских судов // Вестн. науки. 2020. № 11 (32). С. 134–139.
3. Ручкин Ю. Н. Судовые энергетические установки и их элементы: учеб. пособие. Н. Новгород: Изд-во НГТУ им. Р. Е. Алексеева, 2008. 158 с.
4. Комаров В. В. Состояние укладки гребных валов на дейдвудных опорах // Вестн. Астрахан. гос. техн. ун-та. 2006. № 2 (31). С. 259–267.
5. ГОСТ 7199-77. Подшипники резино-метал-лические судовые. Технические условия. М.: Изд-во стандартов, 1977. 15 с.
6. Михайлова М. А. Анализ изнашивания дейдвудных подшипников в зависимости физико-механических харак-теристик материала вкладышей и условий эксплуатации судна // Вестник Астрахан. гос. техн. ун-та. 2005. № 2 (25). С. 135–140.
7. Халявкин А. А., Мамонтов В. А., Бондаренко В. В., Ивановская А. В., Лошадкин Д. В., Еремицкий П. В. Способ повышения надежности дейдвудных подшипников валопроводов судов // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техника и технология. 2022. № 1. С. 42–49.
8. Халявкин А. А., Санжапов А. Р., Матвеев Ю. И., Ениватов В. В., Ивановская А. В. Повышение надежности дейдвудных подшипников путем лазерной наплавки гребного вала // Вестн. Керч. гос. мор. технолог. ун-та. Сер.: Морские технологии. 2024. № 3. С. 42-48.
9. Дорошенко П. А., Рохлин А. Г., Булатов В. П. и др. Технология производства судовых энергетических устано-вок: учеб. Л.: Судостроение, 1988. 440 с.
10. Халявкин А. А., Лошадкин Д. В., Старкова М. В., Безруков Н. П., Яковлев Ю. Ю. Разработка дейдвудного подшипника с эллиптическими вкладышами // Мор. вестн. 2024. № 1 (89). С. 38–40.
11. Халявкин А. А., Матвеев Ю. И., Саламех Али, Слиман Саусан. Повышение надежности механизмов судовой энергетической установки // Судостроение. 2024. № 5. С. 62–65.
12. Лысенко Д. А., Братан С. М., Харченко А. О., Корчевский С. В. Показатели надежности опорных подшипников корабельных валопроводов // Учен. зап. Крым. инженер.-пед. ун-та. 2022. № 4 (78). С. 243–249.
13. Лысенков П. М., Пряхин О. М., Рубин М. Б. Пути повышения технологичности дейдвудных устройств круп-нотоннажных судов // Судостроение. 1980. № 9. С. 34–38.
14. Румб В. К., Хоанг Ван Ты. Определение упругих и демпфирующих свойств упорного подшипника при расчете осевых колебаний судовых валопроводов // Мор. вестн. 2019. № 1 (69). С. 64–67.
15. Писаренко Г. С., Яковлев А. П., Матвеев В. В. Справочник по сопротивлению материалов. М.: Мир, 1985. 694 с.
16. Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. 560 с.
17. Халявкин А. А., Мамонтов В. А., Кушнер Г. А., Купряшин И. А. Оценка влияния расположения опор судового валопровода на его жесткость // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техника и технология. 2017. № 3. С. 74–79.
