









Россия
Россия
Россия
Решается одна из проблем теории управления объектами с высокой степенью неопределенности поведения: предложена разработка теоретических основ анализа, методов моделирования и совершенствования биокибернетических систем, их алгоритмического и программного обеспечения, необходимого для повышения эффективности процесса управления. Для решения указанной задачи предлагается использовать математический аппарат теории информации, на базе которого рассчитываются информационные характеристики канала передачи управляющего сигнала от источника к объекту управления через внешнюю среду с учетом шумов экосистемы объекта управления. Проанализированы существующие системы, применяющие мономодальные управляющие сигналы, не несущие смысловой нагрузки, а также описаны недостатки и ограниченность возможностей совершенствования рассматриваемых систем управления. На примере одной из систем управления поведением насекомых с трихромным видом зрения выполнено сравнение полученных результатов при использовании различных технических средств, применяемых в качестве источников управляющего сигнала. С целью повышения эффективности систем управления при использовании многомодальной структуры управляющего сигнала предложены различные алгоритмы построения управляющих систем с использованием многомодальной структуры управляющего сигнала, а именно: последовательная и параллельная схемы, комбинированная, совмещающая последовательные и параллельные алгоритмы задействования источников управляющего сигнала. В качестве метода дальнейшего повышения эффективности систем управления биологическими объектами с высокой степенью неопределенности предложено использовать биологические сигналы, содержащие большую смысловую нагрузку для объекта управления, которая определяет его поведенческую реакцию. Сформулированы направления дальнейших исследований с целью максимизации количества информации, передаваемой объекту управления.
системы управления, передача управляющего сигнала, биологические объекты, источник сигнала, оптическое излучение, длина волны, рецепторы, информационные характеристики
Введение
В настоящее время существуют разнообразные технические системы, предназначенные для управления на биофизической основе поведением рыб, насекомых и некоторых других биологических объектов. К таким системам, в частности, относятся системы лова рыбы с применением световых и акустических сигналов, системы борьбы с гнусом с применением световых, акустических и хемиосигналов и др.
Вопросами проектирования систем управления биологическими объектами на основе биосигналов были посвящены работы российских (В. Н. Мельников, М. Ю. Кузнецов, В. Р. Протасов) и зарубежных ученых (Casper J. van der Kooi, Eric J. Warrant, Andreia F. Dexheimer) [1–6].
Целью работы является анализ систем управления объектами с высокой степенью неопределенности поведения и модернизация указанных систем с целью повышения их эффективности.
Для достижения указанной цели необходимо изучить актуальные проблемы теории управления биологическими объектами, выявить недостатки существующих систем и предложить методы, позволяющие устранить данные недостатки.
Анализ процесса передачи сигнала объекту управления
Преобладающий подход к проектированию систем управления объектами биологической природы, на наш взгляд, обладает некоторыми недостатками,
а именно: математические модели не рассматривают систему управления как канал передачи информации от источника к объекту управления, состоящий из следующих основных элементов (рис. 1).

Рис. 1. Схема системы управления объектом биологической природы [7]
Fig. 1. Scheme of the control system for an object of biological nature [7]
В существующих системах управления объектами биологической природы, как правило, используют источники физического поля одной модальности. Такие системы имеют ограниченный ресурс для увеличения их эффективности, который определяется возможностями выбора параметров канала передачи управляющего сигнала в условиях шумов источника, экосистемы и объекта управления, максимизирующих его пропускную способность, определяемую количеством передаваемой информации П. Кроме того, возможности максимизации пропускной способности канала передачи управляющего сигнала ограничены диапазоном чувствительности рецептора, служащего приемником информации [1–4].
Как правило, в математических моделях систем управления в качестве приемника управляющего сигнала рассматривается один рецептор объекта управления и отсутствует оценка информационных характеристик системы [3]. Например, при учете реакции на стимуляцию световых рецепторов используются источники света одного типа, для которых изменяются геометрические параметры. Также для повышения эффективности регулируется положение источника управляющего сигнала в пространстве относительно области, в которую необходимо приманивать объект управления. Для имитации естественного источника управляющего сигнала используется регулировка мощности различных излучателей, позволяющая сгладить переход между зонами отсутствия и наличия сигнала [8].
При исследовании реакции хирономид на стимуляцию звуковых рецепторов продолжительным акустическим воздействием определенной частоты наблюдались следующие результаты: в диапазоне 260–320 Гц насекомые приходили в движение в сторону источника сигнала; при 140–200 Гц наблюдался противоположный эффект. Объясняется подобное поведение биологических объектов наличием у рассматриваемых видов насекомых способности к разложению сигнала на спектральные составляющие [9].
В рассмотренных выше случаях наблюдается безусловная реакция объекта управления на источник управляющего сигнала, приводящая к его отпугиванию или приманиванию, а передача сигнала через внешнюю среду осуществляется от источника одной модальности, что можно проиллюстрировать следующей схемой (рис. 2).
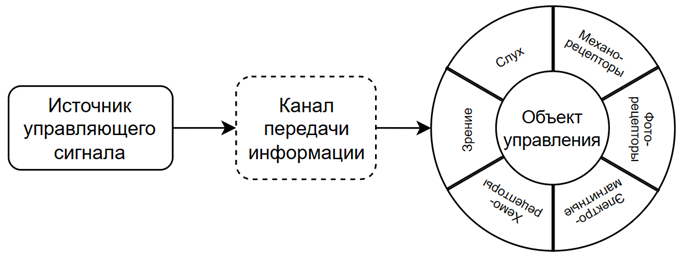
Рис. 2. Схема передачи сигнала объекту управления
Pic. 2. Scheme of signal transmission to the control object
На диаграмме (см. рис. 2) изображена система управления объектом биологической природы, состоящая из объекта управления (ОУ), который может иметь совокупность сенсоров различного типа [10]: зрение, слух, механорецепторы (МР), фоторецепторы (ФР), рецепторы, чувствительные к электромагнитным полям (ЭМ), хеморецепторы (ХР).
Управляющий сигнал передается от единственного источника управляющего сигнала (ИУС) через один канал передачи информации (КПИ) к объекту управления. Поскольку используется мономодальный источник, воздействие происходит только на один рецептор [11].
В то же время источники, хотя и могут быть широкополосными, но при анализе математических моделей выявлено, что все сводится к моночастотному сигналу, который в результате расчетов получается выбранным для данного рецептора объекта управления. В частности, для насекомых с трихромным зрением оптическое излучение в диапазоне
≤ 365 нм может являться супероптимальным стимулом, вызывающим движение насекомого в сторону источника излучения, что обосновывается не только чувствительностью органа зрения, но и другими биологическими особенностями строения насекомых [12, 13].
Сравнительный анализ одной из существующих и модифицированной математических моделей передачи информации объекту управления
В качестве примера сравнения моделей, использующих широко- и узкополосные ИУС, рассмотрена модель передачи оптического сигнала насекомым [14].
При сравнении математических моделей передачи информации ОУ исходная модель модифицирована следующим образом:
– в качестве приемника управляющего сигнала рассматривается только монохромный компонент зрения, воспринимающий ультрафиолетовую часть спектра излучения (УФ);
– диапазон рассматриваемых длин волн оптических сигналов соответствует границам излучения источника;
– использован узкополосный источник оптического излучения на примере УФ матрицы, график зависимости излучательной способности от длины волны λ которой представлен на рис. 3.
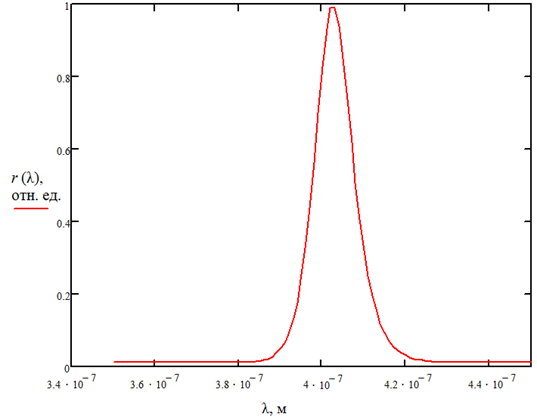
Рис. 3. График зависимости излучательной способности r(λ) узкополосного источника от длины волны λ
Fig. 3. Graph of the dependence of the emissivity r(λ) of a narrowband source on wavelength λ
В результате аппроксимации графика, приведенного выше, была получена функция
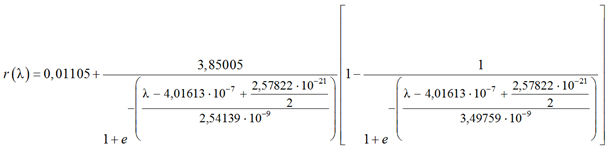
Оптический сигнал, воспринимаемый органом зрения насекомого с использованием узкополосного источника излучения, описывается формулой [14]
 (1)
(1)
где m – коэффициент, учитывающий разницу между функциями видности глаза человека и ОУ; l – расстояние от источника излучения до ОУ; r(λ) – функция спектральной излучательной способности селективного источника света; τ(λ) – функция относительной спектральной чувствительности ОУ; q(λ) – спектральный коэффициент поглощения слоя атмосферы толщиной 1 м; λ1, λ2 – верхняя и нижняя границы диапазона соответственно.
Оптический шум от искусственного источника УФ излучения Ши выражается формулой [14]
 (2)
(2)
где h – высота источника над поверхностью земли; ƒ(λ) – функция пропускания фильтра; Noise (λ) = µ(λ) S1 + υ(λ) S2 + ψ(λ) S3), µ(λ), υ(λ), ψ(λ) спектральные характеристики отражения почвы, воды и растительности соответственно; S1, S2, S3 – весовые коэффициенты, показывающие относительную долю площади, занимаемой соответствующими поверхностями, в 1 м2.
С учетом формул (1) и (2) запишем выражение для функции «отношение сигнал/шум» в общем виде:
где Шс – шум, обусловленный отражением прямого солнечного излучения от природных поверхностей.
Ниже представлены результаты сравнительного анализа расчетов функций «отношение сигнал/шум» для набора источников различного типа с учетом чувствительности органа зрения ОУ: рис. 4, а – для полного диапазона чувствительности рецепторов ОУ, рис. 4, б – для УФ диапазона.
а б
Рис. 4. Графики зависимости функции «отношение сигнал/шум»
от параметров высоты для различных диапазонов чувствительности приемников: в полном диапазоне (а), в УФ диапазоне (б) – и различных источников управляющего сигнала:
Г – галогенная лампа; В – вольфрамовая лампа; У – источник УФ излучения
Pic. 4. Graphs of the dependence of the signal-to-noise ratio function
on height parameters for different sensitivity ranges of receivers: in the full range (а), in the UV range (б) and various sources of the control signal:
Г – halogen lamp; B – tungsten lamp; У – source of UV radiation
При рассмотрении УФ диапазона удалось увеличить значение функции «отношение сигнал/шум» по сравнению с рассмотренными широкополосными источниками (см. рис. 4 а, б), однако это увеличение оказалось незначительным. Отсюда следует, что изменение состава технических средств, входящих в систему управления, не всегда приводит к существенному повышению производительности установки, которая является показателем эффективности процесса управления:
N = K · П · t,
где N – производительность установки; K – некоторый постоянный для данной ловушки коэффициент; П = Δƒ · log2(1 + С / Ш) – пропускная способность КПИ, с–1, Δƒ – полоса частот, Гц, воспринимаемая органом зрения насекомого, С – сигнал, Вт, Ш – шум, Вт, С / Ш – функция «отношение сигнал/шум»; t – время работы установки [14].
Таким образом, при увеличении пропускной способности КПИ П эффективность системы управления повышается.
Варианты алгоритмов построения систем управления
На наш взгляд, возможностью для увеличения эффективности систем управления биологическими объектами с высокой степенью неопределенности поведения является использование нескольких рецепторов ОУ при их последовательном или параллельном задействовании, поскольку при этом суммируется количество передаваемой информации През:
![]()
где През – результирующее количество информации, передаваемой ОУ; П1, П2, ..., Пn – количество информации, передаваемой ОУ через различные рецепторы. При этом подразумевается, что последовательное воздействие на определенные рецепторы будет осуществляться в некоторых временных интервалах Δt1, Δt2 и т. д. (рис. 5).
Рис. 5. Схема системы управления с последовательным алгоритмом применения ИУС
Fig. 5. The scheme of the control system with a sequential algorithm for the application of CSS
Другим вариантом построения алгоритма управления ОУ может являться применение параллельного воздействия одновременно на несколько рецепторов ОУ (рис. 6).
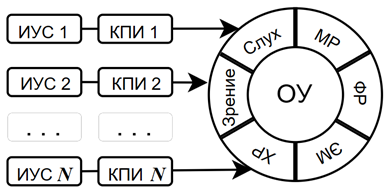
Рис. 6. Схема системы управления с параллельным алгоритмом применения источников
Fig. 6. A control system scheme with a parallel source application algorithm
На рис. 6 изображено одновременное воздействие нескольких источников на разные рецепторы ОУ: первый, акустический источник передает информацию, воздействуя на звуковые рецепторы; второй источник, оптического излучения, воздействует на светочувствительные рецепторы. Прочие источники могут также воздействовать на другие рецепторы, например, на диаграмме изображено воздействие на хеморецепторы.
Также возможен и алгоритм построения системы управления, совмещающий последовательную и параллельную схемы воздействия на группу рецепторов ОУ.
С целью повышения эффективности системы управления в первом временном интервале Δt1 происходит воздействие одним набором/сочетанием ИУС, а в следующем интервале Δt2 – другим набором/сочетанием ИУС (рис. 7).
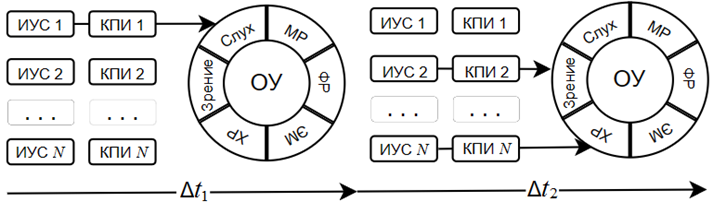
Рис. 7. Схема системы управления с комбинированным алгоритмом применения ИУС
Fig. 7. The scheme of the control system with a combined algorithm for the application of CSS
Кроме того, одним из возможных способов совершенствования систем управления ОУ, на наш взгляд, является применение биосигналов, которые имеют смысловой характер, определяющий поведенческую реакцию ОУ. В качестве таковых могут быть шумы пережевывания пищи или создание повышенной концентрации определенных веществ, которые определяют движение ОУ в нужном направлении, и т. д. [15–17]. Тогда для оценки эффективности управления необходимо использовать современные средства получения обратной связи от ОУ [18].
Разработка эффективных систем управления требует, с одной стороны, изучения биофизической природы ОУ, с другой стороны – использования математического аппарата теории информации как основного инструмента анализа, необходимого для построения адекватных математических моделей и расчета информационных характеристик системы управления.
Заключение
На основании анализа актуальных проблем теории управления объектами с высокой степенью неопределенности поведения, приведенного в статье, предложено использовать математический аппарат теории информации, на базе которого рассчитываются информационные характеристики канала передачи управляющего сигнала от источника к объекту управления через внешнюю среду с учетом шумов экосистемы объекта управления. Сравнение существующих систем, применяющих мономодальные управляющие сигналы, не несущие смысловой нагрузки, позволило установить недостатки и ограниченность возможностей совершенствования указанных систем при использовании различных технических средств, применяемых в качестве источников управляющего сигнала. В качестве метода повышения эффективности систем управления предложено использовать многомодальную структуру управляющего сигнала в сочетании с различными алгоритмами построения управляющих систем, а именно: последовательную и параллельную схемы, комбинированную, совмещающую последовательные и параллельные алгоритмы задействования источников управляющего сигнала.
1. Мельников В. Н. Основы управления объектом лова. М.: Пищ. пром-сть, 1975. 359 с.
2. Кузнецов М. Ю. О возможности интенсификации тралового лова быстрых пелагических рыб в ЮВТО с использованием пневмоакустических систем // Науч. тр. Дальрыбвтуза. 2007. № 19. С. 114–120.
3. Протасов В. Р. Зрение и ближняя ориентация рыб. М.: Наука, 1968. 220 с.
4. van der Kooi C. J., Stavenga D. G., Arikawa K., Be-lušic G., Kelber A. Evolution of Insect Color Vision: From Spectral Sensitivity to Visual Ecology // Annual Review of Entomology. 2021. V. 66. P. 435–461.
5. Warrant E. J., Kelber A., Gislén A., Greiner B., Ribi W., Wcislo W. T. Nocturnal Vision and Landmark Orienta-tion in a Tropical Halictid Bee // Current Biology. 2004. V. 14. Iss. 15. P. 1309–1318.
6. Dexheimer A. F., Outomuro D., Dunlap A. S., Morehouse N. I. Spectral sensitivities of the orchid bee Euglossa dilemma // Journal of Insect Physiology. 2023. V. 144. P. 104464.
7. Лихтер А. М. Моделирование систем управления процессами лова рыбы: моногр. Астрахань: Изд. дом «Астраханский университет», 2006. 315 с.
8. Мизюркин М. А., Жук А. П., Кручинин О. Н., Еремин Ю. В., Буслов А. В., Волотов В. М., Ваккер Н. Л., Филатов В. Н., Захаров Е. А., Сытов А. М. Результативность промысла сайры судами, оснащенными различными источниками света // Рыбное хозяйство. 2019. № 1. С. 30–34.
9. Адаев М. Б., Гринченко В. Д., Груздев Г. А., Лап-шин Д. Н. Исследование реакций роящихся хирономид Cladotanytarsus sp. (Chironomidae, Diptera) на акустические стимулы // Бюл. Моск. о-ва испытателей природы. Отд. биолог. 2016. Т. 121. № 5. С. 26–32.
10. Souto P. M., Antunes A. F., Nunes V. C. S., Souto P. M. Insect Sensory System // Encyclopedia of Animal Cognition and Behavior. Springer, Cham., 2021. P. 1–13.
11. Дубик В. М. Обоснование оптических аттрактантов для привлечения ночных насекомых в саду // Энергосбережение. Энергетика. Энергоаудит. 2010. № 12 (82). С. 55–61.
12. Мазохин-Поршняков Г. А. Зрение и визуальная ори-ентация насекомых // Биология. 1980. Вып. 3. С. 131–138.
13. Жигальцева М. И., Чернобровина С. М., Гнилюк С. И. Исследование эффективности установок с различными излучателями для привлечения яблонной плодожорки // Изв. АН МССР. 1964. № 5. С. 114–117.
14. Плешкова Ю. А. Математическое моделирование эффективных систем передачи оптического сигнала насекомым: дис. … канд. техн. наук. Тамбов, 2014. 172 с.
15. Кузнецов М. Ю., Шевцов В. И., Краснов В. С. Использование гидроакустических полей для управления поведением морских биологических объектов в процессе лова // Прикладные технологии гидроакустики и гидрофизики: тр. XV Всерос. конф. (Санкт-Петербург, 21–25 сентября 2020 г.). СПб: Б. и., 2020. С. 128–131.
16. Malfante M., Mars J., Mauro M. D., Gervaise C. Automatic fish sounds classification // The Journal of the Acoustical Society of America. 2018. P. 2834–2846.
17. Кузнецов М. Ю. Обоснование параметров акустических стимулов для дистанционного воздействия на поведение тихоокеанского кальмара и технологии его лова с использованием звука // Изв. ТИНРО. 2010. Т. 161. С. 278–291.
18. Алексеев П., Квятковская И. Ю. Применение нейронных сетей в системе распознавания промысловых гидробионтов в условиях повышенной флуктуации // Вестн. Астрахан. гос. техн. ун-та. Сер.: Управление, вычислительная техника и информатика. 2022. № 2. С. 76–86. DOI: https://doi.org/10.24143/2072-9502-2022-2-76-86.
