












Россия
Россия
Проведен анализ модели системы «судно – «человеческий элемент» – окружающая среда» на базе ассоциативно-структурного подхода и проиллюстрирована возможность ее работы в стационарном режиме, обеспечивающем требуемый уровень безопасности мореплавания при неизменном логическом операторе связи между системообразующими факторами. Доказано, что минимизировать опасные фазовые переходы в системе «судно – «человеческий элемент» – окружающая среда» возможно путем целенаправленного использования выделенного ресурса и проведения многопараметрического контроля операций при минимуме информации, необходимой для диагностики оборудования и инструктажа экипажа судна. Представлены результаты исследования сценариев судовых операций и процедур управления состоянием судна, создания элементов теории безопасной эксплуатации судна в нестандартных и аварийных ситуациях в условиях фазовых переходов состояний структурообразующих факторов системы. Разработаны элементы методологии анализа и синтеза сценариев операций и процедур управления состоянием безопасной эксплуатации судна в установившемся режиме в рамках программно-целевого подхода в виде логических программ. Дано описание алгоритма актуализации сценариев операций и процедур управления состоянием безопасности судна в особых условиях плавания и в аварийных ситуациях. Разработанные направления по совершенствованию процесса управления состоянием безопасной эксплуатации судов посредством многокритериальной оптимизации производственного и навигационного процесса и составлением сценариев и процедур управления позволяют снизить уровень аварийности на судах в транспортных, нефтегазовых и рыбопромысловых отраслях Российской Федерации.
безопасность мореплавания, модель, сценарии операций, управление судном, эксплуатация судна
Введение
В мировом судоходстве количественный и качественный рост флота является одной из важнейших причин, существенно влияющих на состояние организации безопасной эксплуатации судов. Практически не снижающийся уровень аварийности судов, возникновение катастроф на морском транспорте
и в рыболовной отрасли приводят к гибели людей, потере судов и материальных средств, невосполнимым экономическим и экологическим последствиям, что свидетельствует об актуальности решения проблем безопасной эксплуатации судов.
С управлением состоянием безопасности судна судовой командой и береговым персоналом компании связывается большая часть аварий в мировом судоходстве [1–6].
Деятельность судоводителя в управлении состоянием безопасности судна необходимо рассматривать сегодня с точки зрения социотехнических систем, принимая судно как сложную инженерно-техническую систему, которая во взаимосвязи с социальной системой – экипажем – образует сложные социотехнические системы управления безопасной эксплуатацией судна [7].
Глобальные системы управления безопасностью сегодня развиваются и обеспечиваются современными интегрированными автоматизированными системами с новыми технологиями и сложными структурами. Возрастающие пределы чувствительности таких систем делают их зависимыми от состояния внешних и внутренних факторов, человека и среды. Требуется разработка более новых форм и методов
в обеспечении безопасности плавания и живучести судна, нового оборудования, технологий, качественных нормативных документов [8].
Разрешение проблем в обеспечении безопасности мореплавания судна в эксплуатационных,
нестандартных и аварийных ситуациях является важным и актуальным направлением исследований, позволяющим повысить эффективность функционирования морской транспортной, нефтегазовой и рыболовной отраслей России [9, 10].
В работах отечественных исследователей, посвященных анализу и синтезу слабоформализуемых проблем, отражающих вопросы управления состоянием безопасности судов в системе «судно – «человеческий элемент» – окружающая среда» (далее – Система), не отражена важная проблема, связанная с разработкой сценариев операций
и процедур по управлению состоянием безопасности судна.
Окончательно сформулированных общетеоретических методов анализа и синтеза сценариев судовых операций и процедур управления в многомерных нелинейных системах по безопасному управлению состоянием судна в настоящее время не существует. Причинами этого являются сложности взаимодействия структурообразующих факторов Системы, обладающих свойствами динамичности, нелинейности, многомерности и противоречиями целей управления [5, 6].
Задачи по анализу и синтезу сценариев судовых операций и процедур по управлению безопасным состоянием судна и их разрешение в Системе можно отнести к центральной проблеме современной теории по обеспечению безопасности мореплавания.
Принципы построения ассоциативно-структурной Системы, многопараметрический контроль мореходных качеств судна и вероятность появления критических ситуаций
Модель Системы описывается в рамках ассоциативно-структурного подхода. Общее описание структурообразующих факторов сделано с опорой на применимые морские конвенции СОЛАС-74/78, ПДНВ-78/95. В рамках этих конвенций были определены состояния технического элемента (судна), «человеческого элемента» и морской среды на двухточечных множествах [4–6].
В результате объединения структурообразующих факторов на двухточечных множествах была синтезирована структура Системы (рис. 1) в виде
η = (X, I, Y), (1)
где X – множество элементов структуры; I – культура, отвечающая требованиям Международного кодекса по управлению безопасностью (МКУБ);
Y – общий производственный процесс функционирования системы.
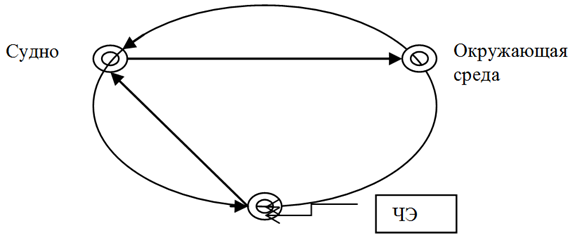
Fig. 1. System “ship - human element - environment”
В рамках этой структуры на множестве элементов X с помощью культуры I взаимодействие структурообразующих факторов образует операции, безопасное выполнение которых обеспечивается управляющими процедурами в общем производственном процессе Y функционирования системы [9, 11–14].
Разбивая общий процесс Y по «слабым» связям между элементами структуры η, получим три важных процесса Y1, Y2, Y3 Î Y : Y1 – процесс между техническим средством и средой; Y2 – процесс между техническим средством и «человеческим элементом»; Y3 – процесс между техническим средством, «человеческим элементом» и средой.
На базе вышеобозначенных процессов составлена обобщенная модель работы Системы на принципах структурно-ассоциативного подхода при условии выполнения параметрического контроля с оценками достоверности этого контроля
и оценками вероятности отказа модели в целом
[8, 15–17] (рис. 2).
Модель определяет понятие состояния безопасной эксплуатации судна, относительно которого следует управлять заданным уровнем безопасности мореплавания.
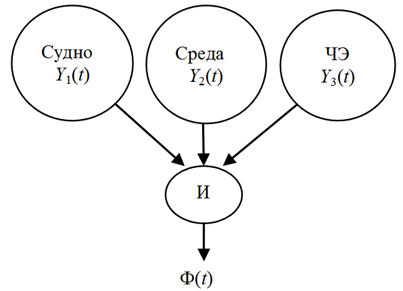
Рис. 2. Структурно-ассоциативная модель
Fig. 2. Structural-associative model of the system
“ship - human element - environment” functioning
Состояния судна в эксплуатации в рамках ассоциативно-структурной системы представляем цепью фазовых переходов
Ф1 → Ф2 → Ф3 → … → Фm, m → N.
С введением индикаторной функции вида
![]()
где Φ0 – состояние судна, отвечающее норме «хорошая морская практика».
После преобразований получим равенство
![]()
Отсюда вероятность безопасного эксплуатационного состояния судна Φ(t) Í Φ0 можно получить через «хорошо» определенное значение p1. В рамках теоремы Боголюбова временную последовательность фазовых переходов на выходе системы (рис. 2) следует наделять свойствами стационарности и эргодичности. Используя гипотезу о полной вероятности сложного события Φ(t), можно получить вероятность p2 события Φm Ë Φ0, когда эксплуатационное состояние судна не отвечает условиям безопасного мореплавания [1, 2, 18].
Таким образом, область фазовых переходов состояний модели Системы обладает двумя точками плотности. И чтобы обеспечивать состояния безопасной эксплуатации судна, необходимо минимизировать значение вероятности опасных переходов p2, управляя процессами Y1, Y2, Y3 Î Y, например управляя состояниями ассоциаций «человеческий элемент» и «судно», целенаправленно используя управляющие процедуры и выделенный ресурс. Такое поддержание в ассоциациях требований международных конвенций, региональных и национальных норм и правил без изменения логического оператора связи и ассоциаций является признаком диссипативности ассоциативно-структурной Системы (рис. 2) в целом.
На элементах теории диссипативных систем дано описание динамики навигационного происшествия, сформированного в виде переходов состояний судна: «безопасное – критическое – аварийное». Судоводитель фиксирует ситуацию на множестве текущих факторов {S}, включающих области безопасной {S}В и опасной {S}0 навигационной ситуации. Так, если лицо, принимающее решения (ЛПР), не способно оценить ситуацию
и выбрать управления или для управления недостаточно ресурсов, то возможен переход в точку плотности области аварийных ситуаций. Для исключения такого перехода была составлена модель механизма выбора последовательности управлений (управляющих процедур) u(r) Î U(R) на базе абстрактных логических подсистем с общими функциями для таких систем. Связь механизма выбора управляющих процедур и прогноза соответствующих рисков можно представить циклическим направленным графом.
Система (рис. 2) допускает независимые отдельные отказы технических средств, организационные сбои и ошибки «человеческого элемента». При этом ее надежность определяется вероятностью появления аварийных ситуаций за определенный период времени. Для оценки такой надежности составлена модель многопараметрического интервального контроля состояния судна и разработана методика оценки вероятности появления критических ситуаций с последствиями и без
последствий.
Описание процесса анализа и синтеза сценариев операций по переводу судна из состояния субстандартности в безопасное состояние
с оценкой возможных затрат
Сценарий судовой операции задается в лингвистическом виде, представляет собой описание целенаправленных действий человека с использованием ресурса при минимальной избыточности» [16]
и формализуется с помощью контентного анализа [2] K ~ mod Π как категория, эквивалентная набору лингвистически описанных признаков, образующих теорию сценария перехода состояний судна. Сценарий формируется согласно результатам оценки непротиворечивости и согласованности элементов теории K (требования к информации)
и воспроизводит мнения всех специалистов, для чего используется статистическая модель вероятности точных суждений экспертов.
Тогда в границах составленного сценария любую операцию, проходящую на включенном в Систему судне, можно рассматривать как структурированное явление
![]()
где Σ – отображение словесных признаков Π
в структуре, состоящей из: P0 – множество элементов технических средств, специалистов и их связей; S – множество правил по выполнению переходов; Q – множество действий при переходе объекта управления из состояния в состояние.
В рамках структуры «человеческий элемент» может изменить порядок выполнения судовой операции. Однако «свобода» действий человека при выполнении судовой операции ограничивается как ее наблюдаемостью, так и имеемым ресурсом [1–3, 8, 16–22].
Механизм выбора последовательности действий u = {ui} в операции осуществляется в рамках принятой ЛПР информации. Устанавливаем структуру векторов действий: текущего – λi, планового – xi
и в i-й операции – yi = {yij}. В планируемой операции вектора действия yi = xi должны быть идентичны, т. е. ui : ui = (λi, xi). Тогда и в Системе (1) множество векторов в операции запланированных Xi(ri) и действий Yi(ri) должно совпадать, а множество реализуемых плановых векторов судовых операций соответствует множеству равенств состояний Системы вида X(r) : X(r) = Y(r).
С учетом концепции ФОБ, МКУБ и ограничений «человеческого элемента» механизм выбора последовательности действий позволяет представить два варианта процесса синтеза операции.
В первом варианте синтеза операции с назначением векторов – планового и текущего – вектор действий в операции yi* будет «обязательно» реализовываться выгодным путем. Ограничивая его реализацию y* = {yi*} в операции, будет реализовываться жесткий выбор действий, отвечающих рекомендациям и требованиям ИМО, например. Это может привести к появлению недостоверной информации, снижающей качество выполнения этой операции. Во втором варианте синтеза операции ориентация должна быть осуществлена за счет ограничений, накладываемых на целевую функцию,
и учета перспектив при несовпадении вектора реализации операции и планового вектора операции
xi ≠ yi, i Î I, что может привести к отношению
fi(λ, xi, yi) < fi(λ, yi, yi), когда целевая функция при текущем действии yi будет наибольшей. Такое же отношение будет и для всех целевых функций операций, используемых в Системе (см. рис. 1)
Ф(λ, x, y) < Ф(λ, y, y).
Снизить влияние недостоверной информации или несовпадения векторов x ≠ y можно за счет привлечения элементов культуры наказания, включенной в систему администрирования, принятой в компании. Однако при любом варианте синтеза операции ее механизм работы должен обладать ресурсом и может быть представлен цепочкой (последовательностью) действий человека, формализованной с помощью типовых операционных
и структурных описаний, а также логических схем в виде череды операторов и логических условий.
Перечислим этапы процесса взаимодействия системообразующих факторов в виде операций
в границах принятой модели Системы:
– сбор и обработка сообщений, по которым «человеческий элемент» формирует оценки s = {si} параметров ресурса r = {ri};
– планирование «человеческим элементом» действий, характеризуемых векторами: текущим λ(s)
и плановым x(s) в рамках механизма выбора η(s);
– выбор вектора действия yi из множества Zi(xi(s), ri, i Î I) (с учетом дополнительных ограничений) с последующей оценкой значений целевых функций операций.
Гармонизация отношений между множеством действий при выполнении операций и имеемыми ресурсными возможностями отражают принцип – экономическая эффективность ограничена рамками безопасной эксплуатации судов. Оптимизация функционала вида:
![]()
где C – общие расходы на безопасное выполнение операции; s'(rj) – расходы при выделении ресурса
с текущим эксплуатационным параметром способности rj; s''(rj) – потери при выполнении аварийных операций; N – число действий в операции, создающих стоимость выделяемого ресурса управления s. Она разрешает задачи гармоничного выбора ресурса управления для безопасного проведения операции и определяет два варианта: первый предполагает, что расходы на его получение не лимитированы; вторым устанавливается квота на получение
ресурсов, отвечающих оптимальным затратам.
Взаимодействие судна и окружающей среды в Системе
Предложен механизм формирования процедур управления судовыми операциями на примере процесса маневрирования судна. При описании этого процесса использовались флуктуирующие аддитивные и мультипликативные модели судна, а также преобразования оперативных действий в рекомендуемые управления «человеческого элемента»,
в границах которых использована структура
![]() (2)
(2)
В данном случае процедура управления состоянием судна MU при его маневрировании представляет собой последовательность действий Y «человеческого элемента» в операции управления U состоянием судна, подкрепленных ресурсом G
и направленных на реализацию заданной цели R
в структуре η (2) в рамках I – системы отношений и правил, обеспечивающих однозначность между действиями Y и управлениями U [4–6].
Для исследования модели преобразования ресурса в состояние безопасной эксплуатации судна за счет квалифицированного труда и знаний «человеческого элемента» была рассмотрена перестройка сложных структур и процессов (2) в виде упрощенной модели, по которой было составлено логическое преобразование действий в управления
[6, 10, 15, 23], как выполнение технологии преобразования действий в процедуру управления безопасной судовой операции z Î Z Í R × U × G Ì I:
где η0 Î η – упрощенная структура; J Ì I – включает конкретную алгебру и систему отношений одинаковости; U0 – планомерное управление; Y0 – последовательность действий.
Фиксируя начальное и конечное управления, можно преобразовать эту модель в систему (Y0, U0, L) с фиксированным входом и выходом и выделить оператор L Î (Y0 × U0) как множество операторов, преобразующих входные воздействия Y0 в реакцию системы – выходные управления U0. Оператор можно сопоставить с математической моделью
в виде феноменологического дифференциального уравнения
![]()
где y – изменение ресурса на создание элемента безопасности; С – коэффициент жесткости процесса (затраты на создание новой ценности и время на выполнение процесса); T – коэффициент организационного сопротивления (затраты на подготовку, технологии, оборудование, настройки); М – инерционный коэффициент (затраты на обеспечение ресурсами, планирование). Модель процесса преобразования действий в управление предусматривает выполнение действий по планированию, координации и выполнению процесса [10, 11].
Кроме того, при информационной самодостаточности системы множество элементов и их связи в ней способны к самоорганизации без поступления дополнительной информации, т. е. образуют консервативную по информации систему. Поэтому механизм прогнозирования исхода управления навигационными событиями можно рассматривать как информационную модель процесса, реализованную в сознании судоводителя и составленную им самостоятельно [10, 15, 16, 23]. Структурные избыточность и изменчивость системы универсализируют механизм прогноза результата управления, но могут и затруднить его практическое использование [5].
В универсальной модели маневрирующего судна основную информацию дают взаимодействия важных элементов на значимых связях, не исключая информацию, поступающую из «среды управления». Поэтому в рамках методики бинарной декомпозиции состояния судна были составлены описания как открытого, так и закрытого по информации математического объекта. Универсализация модели маневрирующего судна расширяет возможности прогноза состояния судна и минимизирует риски. В то же время может «размывать» распределения вероятных траекторий управления
и состояние маневрирующего судна, что снижает эффективность прогноза безопасности операции. Универсальная модель судна позволяет выделять основные факторы состояния операций и составить процедуру управления маневрированием с учетом критерия минимума рисков [1–4, 8, 17, 18, 21, 22].
Таким образом, для составления процедуры управления маневрирующим судном следует определить пути снижения производственных издержек и предложить наилучший способ преобразования действий, выделенных в сценарии операции,
в управления. При этом составленная управленческая процедура должна реализовать поставленную цель с максимальной прибылью при минимальных по количеству и величине рисках.
Особенности управления состоянием безопасности в Системе
Эффективное и безопасное состояние судовых операций может быть обеспечено управленческими процедурами в виде логических программ, представляемых как долго действующие связи
в Системе между техническим средством и экипажем [7, 11, 19, 20, 24, 25]. Такие программы должны учитывать принятую в компании культуру управления и реализовываться в рамках программно-целевого подхода (ПЦП), что сводит процесс управления к типовым этапам. Если рассматривать действия экипажа при поддержании эффективного и безопасного состояния судовой операции как логическую программу управлений с реализацией глобальной цели (осуществлять принятую в компании стратегию безопасности), то процедуру управления состоянием судовой операции можно представить отображением [2, 17]
![]() (3)
(3)
где Ξ0 – отображение механизма реализации MF* логической программы с учетом выделенных рисков как процедуры управления операциями;
G – ограниченный управленческий ресурс;
Q – последовательность управлений с учетом перечня возможных рисков.
Процедура управления в виде логической программы (3) реализуется как прямое произведение евклидовых пространств ресурсов и управлений
G0 × Q1 × G1 × Q2 × ... × GN × QN с элементами g0, q1, g1, q2, ..., gN, qN, задаваясь множеством BN чередования элементов < g0, q1, g1, q2, ..., gN, qN >, тогда взаимодействие элементов самой программы можно рассматривать как процесс типа «управление – ресурс» до момента получения результата, закрепленного целевой функцией судовой операции.
Множество установленного чередования управлений и ресурсов BN ограничивает реализацию процедур управления судовой операцией, составить оптимальную процедуру операции для ограниченного ресурса G можно при условии минимальной стоимости функционала вида
![]()
где R1 – числовой ряд от 0 до бесконечности;
BN – множество урегулированных чередований элементов типа < g0, q1, g1, q2, ..., gN, qN >.
Составить сбалансированную процедуру управления с внутренними прямыми и обратными рекуррентными связями можно, если на отдельных временных интервалах связанная пара «управление – ресурс» будет обладать свойством однородности на уровне сбалансированности отношения «управление – ресурс». При наличии таких однородностей процедура управления в виде отображения (3) способна обладать свойством логической программы. Причем такая логическая программа должна обладать наилучшим отношением сбалансированности в сечениях (по ансамблю) и транзитивностью этого отношения по времени (рис. 3).

Рис. 3. Связанная пара состояний «управление – ресурс» в процедуре U на интервале Тj,
подтверждающая принадлежность к классу логических программ
Fig. 3. Connected pair of states “control - resource” in the procedure U on the interval Tj confirming status
of logical programs
Для подтверждения принадлежности (3) сбалансированной процедуры к классу логических программ динамику признака сбалансированной связанной пары состояний «управление – ресурс» представим моделью в виде системы нелинейных дифференциальных уравнений
![]() (4)
(4)
где Y – n-мерный вектор {у1, у2, …, уn} параметров состояния эксплуатационной безопасности при реализации судовой процедуры в интервале Тj
с управлением в состоянии Uj, где t Î Tj; F – нелинейная вектор-функция {f1, f2, …, fn}т; A – матрица с фиксированными элементами; h(t) – процесс характеризует состояние безопасности операции на интервале Tj и задан в области Lr; F(t, Y, z) – функция, определенная в области Lr.
Если процесс h(t) характеризует состояние операции на интервале времени Tj в области Lr, а функция F(t, Y, z) определена в этой же области Lr, то на замкнутом фазовом пространстве Φ в области точки плотности Y0 Î Φ почти однородного управления Uj математическое ожидание отклонений состояния операции управления от безопасного можно оценить так:
![]() (5)
(5)
где С = const; ρ1 и ε – детерминированные и случайные метрики; Y(t) – состояние эксплуатационной безопасности.
Из выражения (5) следует, что состояние эксплуатационной безопасности Y(t) при переходах сбалансированной процедуры от одного управления к другому будет обладать точкой плотности Y0. Такая точка плотности состояний операции, связанная с процедурными управлениями Uj Î U состоянием операции, характерна тем, что все интегральные кривые уравнения (4) стремятся к ней. Такого рода сходимость можно оценить пределом отношения M[ρ(Y)] / t математического ожидания состояний операции от принятого безопасного состояния. Подобное поведение интегральных кривых свидетельствует о свойстве равномерной сходимости траекторий, которое подчеркивает однозначность состояния эксплуатационной безопасности Y0 с управлением Uj и детерминированность управления Uj на интервале времени Tj.
Таким образом, сбалансированная процедура управления судовыми операциями (3) полностью отвечает признакам логической программы и ориентирована на достоверную информацию о системообразующих факторах, поскольку управления Uj не только случайно распределены на интервале времени Тj, j Î J, но и задаются на этом интервале с вероятностью, равной единице [23] (рис. 4).
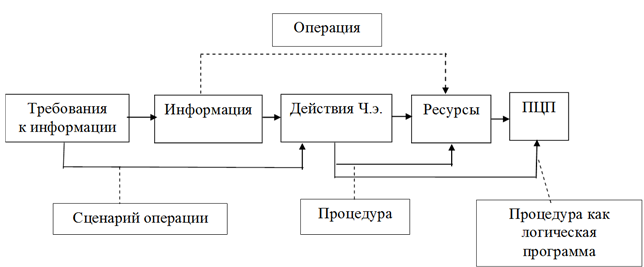
Рис. 4. Схема формирования сбалансированной процедуры управления судовыми операциями,
отвечающая признакам логической программы
Fig. 4. Diagram of developing a balanced procedure for the ship operation control meeting the features of a logical program
При качественных или количественных изменениях системообразующих факторов или при возможном появлении нежелательных вариантов развития судовой операции необходимо расширение процедур управления с описанием дополнительно технических средств и ресурса. Процесс такой актуализации может быть представлен в виде дополнительного цикла в алгоритме (рис. 5).
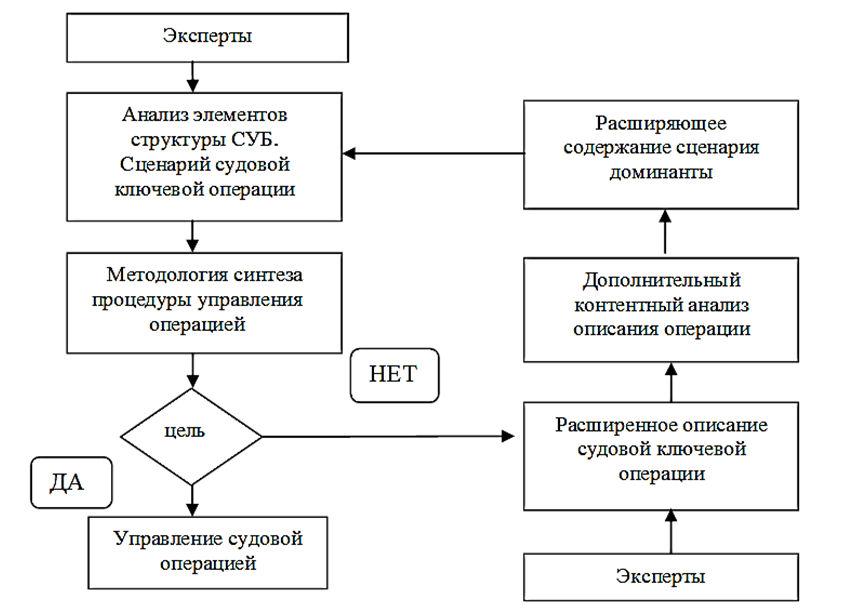
Рис. 5. Алгоритм актуализации операций и процедур управления состоянием судна
Fig. 5. Algorithm for updating operations and procedures for the vessel state control
Внедрение алгоритма (рис. 5) с процедурой управления в программный продукт судовой экспертной системы позволит целенаправленно выбирать наиболее опасные потенциальные риски, нивелировать их влияния на состояние судовой операции и снижать степень их влияния на аварийность судов.
Заключение
Теоретические положения и методы анализа
и синтеза операций и процедур управления можно квалифицировать как новое и достаточно существенное достижение в методологии эксплуатации систем управления безопасностью судов, отвечающих требованиям применимых международных морских конвенций и кодексов к ним. Составленное представление о процессах, идущих в структурах безопасной эксплуатации судов и обусловленных внешними или внутренними воздействиями на структурообразующие факторы, приводит к изменению состояний – фазовым переходам этих факторов, что позволяет выделить ряд направлений
в исследованиях, которые способны повысить уровень безопасной эксплуатации судов в компаниях, в частности:
– направление по анализу моделей Системы, составленных на базе ассоциативно-структурного подхода при неизменном логическом операторе связи между системообразующими факторами;
– направление по минимизации вероятности опасных фазовых переходов в Системе целенаправленным использованием выделенного ресурса и проведением многопараметрического контроля;
– направление по разработке правил анализа
и синтеза сценариев операций и процедур управления состоянием судна с оценкой затрат для случаев, когда операции заданы лингвистической теорией по результатам контентного анализа;
– направление по исследованию процесса функционирования организационной модели судовой операции, которая определяет деятельность судового экипажа в границах системы и подразумевает право «человеческого элемента» на жесткий и нежесткий выбор вектора управления;
– направление, в котором рассматриваются принципы составления оптимальных по затратам процедур управления с учетом гармонизации отношений между множеством действий и имеющимися возможностями судовых ресурсов;
– направление, связанное с внедрением и практическим использованием процедур, представленных в рамках ПЦП и составленных в виде логических программ, действующих на связях в Системе;
– направление, связанное с процессом составления алгоритмов актуализации, позволяющих дополнительно вводить в сценарии операций
и процедуры управления, не учитываемые ранее системообразующие факторы.
Предложенные направления исследований позволят уменьшить влияние «человеческого элемента» при выработке решений по управлению судном. Модели судовых операций и процедур управления, разработанные в рамках предложенных выше направлений, могут быть использованы при составлении программного обеспечения экспертных систем. Такого рода системы позволят обеспечивать комплексную поддержку процессов принятия решений в области обеспечения безопасной эксплуатации судов.
1. Меньшиков В. И. Метрологическая надежность навигации с учетом неполноты информации: автореф. дис. … д-ра техн. наук. СПб., 1995. 40 с.
2. Меньшиков В. И., Анисимов А. Н., Фургаса Десалень Мердаса. Система управления с позиции целенаправленного действия // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2000. Т. 3. № 1. С. 7-12.
3. Кукуи Ф. Д., Анисимов А. Н., Анисимов А. А. Основные процессы в структурах безопасной эксплуатации судна / под ред. В. И. Меньшикова. Мурманск: Изд-во МГТУ, 2008. 185 с.
4. Пеньковская К. В. Живучесть структур безопас-ности мореплавания с учетом человеческого фактора: автореф. дис. … канд. техн. наук. Мурманск, 2007. 22 с.
5. Чкония В. А., Меньшиков В. И. Оценка досто-верности представления базы данных судовому специалисту в интегрированной системе ходового мостика // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2003. Т. 6. № 1. С. 81-86.
6. Юдин Ю. И. Проблема синтеза моделей меха-низма предвидения для экспертных систем, обеспечивающих безопасную эксплуатацию судна: автореф. дис. … д-ра техн. наук. Мурманск, 2007. 47 с.
7. Анисимов А. Н., Меньшиков В. И. Судовая клю-чевая операция - связанная пара «признак-состояние» // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2003. Т. 6. № 1. С. 3-8.
8. Меньшиков В. И., Глущенко В. М., Анисимов А. Н. Элементы теории управления безопасностью судоходства. Мурманск: Изд-во МГТУ, 2000. 242 с.
9. Ершов А. А. Теоретические основы и методы решения приоритетных проблем безопасности мореплавания: автореф. дис. … д-ра техн. наук. СПб., 2000. 44 с.
10. Железнов И. Г. Сложные технические системы: оценка характеристик. М.: Высш. шк., 1984. 119 с.
11. Аркин В. И., Колеманов В. А., Ширяев А. Н. О нахождении оптимальных управлений // Тр. Матем. ин-та им. В. А. Стеклова Рос. акад. наук. 1964. Т. 71. С. 21-25.
12. Анисимов А. Н., Меньшиков В. И., Развозов С. Ю. Структура системы безопасности мореплавания в рамках теории фазовых переходов // Журн. Ун-та вод. коммуникаций. 2013. Вып. 2 (18). С. 109-115.
13. Воронов А. А. Устойчивость, управляемость, наблюдаемость. М.: Наука, 1979. 336 с.
14. Дубров Ю. И. Теоретико-информационный под-ход в задачах оценки качества функционирования сложных систем: дис. ... д-ра техн. наук. Днепропетровск, 1991. 418 с.
15. Ланчуковский В. Формальная оценка и прогно-зирование безопасности технической эксплуатации судна // Судоходство. 2002. № 6. С. 9-10.
16. Логиновский В. А. Применение преобразований подобия для анализа и обработки навигационной информации: автореф. дис. … д-ра техн. наук. СПб., 1991. 47 с.
17. Меньшиков В. И., Еремин М. М. Достоверность контроля состояния безопасности навигации при неиз-быточном числе параметров // Вестн. МГТУ. Тр. Мур-манск. гос. техн. ун-та. 2006. Т. 9. № 2. С. 281-286.
18. Меньшиков В. И., Пасечников М. А., Меньшикова К. В., Гладышевский М. А. Организованность социотехнической системы, обеспечивающей поддержание заданного уровня состояния безопасной эксплуатации судна // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2006. Т. 9. № 2. С. 268-281.
19. Акофф Р., Сасиени М. Основы исследования операций / пер. с англ. В. Я. Алтаева. М.: Мир, 1971. 534 с.
20. Айзерман М. А., Малишевский А. В. Некоторые аспекты общей теории выбора лучших вариантов // Автоматика и телемеханика. 1981. № 2. С. 65-83.
21. Меньшиков В. И., Чкония В. А. Классификация факторов, сопутствующих ошибкам в деятельности морских специалистов // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2003. Т. 6. № 1. С. 75-80.
22. Меньшиков В. И., Рамков И. А., Рябченко Р. Б. Самоконтроль при восприятии навигационной информации в структурах безопасного мореплавания // Эксплуатация мор. трансп. 2010. № 2 (60). С. 45-47.
23. Зубов В. И. Теория оптимального управления. Л.: Судостроение, 1966. 351 с.
24. Анисимов А. Н., Меньшиков В. И., Фургаса Десалень Мардаса. Модель многопараметрического контроля состояния безопасной эксплуатации судна и ее структурный анализ // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2007. Т. 10. № 4. С. 594-599.
25. Анисимов А. Н., Анисимов А. А., Бутаков А. А., Меньшиков В. И. Диссипативное ассоциативно-структурное описание системы безопасности и ее функционирование в рамках теории фазовых переходов // Вестн. МГТУ. Тр. Мурманск. гос. техн. ун-та. 2013. Т. 16. № 1. С. 13-16.
