












Russian Federation
Russian Federation
The analysis of the model of the “ship - human element - environment” system based on the associative-structural approach is carried out and its operation in a stationary mode is shown, providing the required level of navigation safety with a constant logical operator of communication between system-forming factors. Minimizing dangerous phase transitions in the “ship - human element - environment” system has been proved possible by purposefully using the allocated resource and conducting multiparametric control of operations with a minimum of information necessary for equipment diagnostics and instructing the ship’s crew. The research results of developing the scenarios of ship operations and procedures of managing the condition of the vessel, creating the elements of the theory of the vessel safe operation in non-standard and emergency situations in conditions of phase transitions of the states of the structure-forming factors of the system are presented. Elements of the methodology for analyzing and synthesizing scenarios of operations and procedures for managing the state of safe operation of the vessel in steady-state mode within the framework of a program-target approach in the form of logical programs have been developed. The description of the algorithm for updating scenarios of operations and procedures for managing the state of safety of the vessel in special conditions of navigation and in emergency situations is given. The developed directions for improving the control over safe operation of ships by means of multi-criteria optimization of the production and navigation process and by drawing up scenarios and management procedures help reduce the accidents on ships in the transport, oil and gas and fishing industries of the Russian Federation.
safety of navigation, model, scenarios of operations, ship control, ship operation
Введение
В мировом судоходстве количественный и качественный рост флота является одной из важнейших причин, существенно влияющих на состояние организации безопасной эксплуатации судов. Практически не снижающийся уровень аварийности судов, возникновение катастроф на морском транспорте
и в рыболовной отрасли приводят к гибели людей, потере судов и материальных средств, невосполнимым экономическим и экологическим последствиям, что свидетельствует об актуальности решения проблем безопасной эксплуатации судов.
С управлением состоянием безопасности судна судовой командой и береговым персоналом компании связывается большая часть аварий в мировом судоходстве [1–6].
Деятельность судоводителя в управлении состоянием безопасности судна необходимо рассматривать сегодня с точки зрения социотехнических систем, принимая судно как сложную инженерно-техническую систему, которая во взаимосвязи с социальной системой – экипажем – образует сложные социотехнические системы управления безопасной эксплуатацией судна [7].
Глобальные системы управления безопасностью сегодня развиваются и обеспечиваются современными интегрированными автоматизированными системами с новыми технологиями и сложными структурами. Возрастающие пределы чувствительности таких систем делают их зависимыми от состояния внешних и внутренних факторов, человека и среды. Требуется разработка более новых форм и методов
в обеспечении безопасности плавания и живучести судна, нового оборудования, технологий, качественных нормативных документов [8].
Разрешение проблем в обеспечении безопасности мореплавания судна в эксплуатационных,
нестандартных и аварийных ситуациях является важным и актуальным направлением исследований, позволяющим повысить эффективность функционирования морской транспортной, нефтегазовой и рыболовной отраслей России [9, 10].
В работах отечественных исследователей, посвященных анализу и синтезу слабоформализуемых проблем, отражающих вопросы управления состоянием безопасности судов в системе «судно – «человеческий элемент» – окружающая среда» (далее – Система), не отражена важная проблема, связанная с разработкой сценариев операций
и процедур по управлению состоянием безопасности судна.
Окончательно сформулированных общетеоретических методов анализа и синтеза сценариев судовых операций и процедур управления в многомерных нелинейных системах по безопасному управлению состоянием судна в настоящее время не существует. Причинами этого являются сложности взаимодействия структурообразующих факторов Системы, обладающих свойствами динамичности, нелинейности, многомерности и противоречиями целей управления [5, 6].
Задачи по анализу и синтезу сценариев судовых операций и процедур по управлению безопасным состоянием судна и их разрешение в Системе можно отнести к центральной проблеме современной теории по обеспечению безопасности мореплавания.
Принципы построения ассоциативно-структурной Системы, многопараметрический контроль мореходных качеств судна и вероятность появления критических ситуаций
Модель Системы описывается в рамках ассоциативно-структурного подхода. Общее описание структурообразующих факторов сделано с опорой на применимые морские конвенции СОЛАС-74/78, ПДНВ-78/95. В рамках этих конвенций были определены состояния технического элемента (судна), «человеческого элемента» и морской среды на двухточечных множествах [4–6].
В результате объединения структурообразующих факторов на двухточечных множествах была синтезирована структура Системы (рис. 1) в виде
η = (X, I, Y), (1)
где X – множество элементов структуры; I – культура, отвечающая требованиям Международного кодекса по управлению безопасностью (МКУБ);
Y – общий производственный процесс функционирования системы.
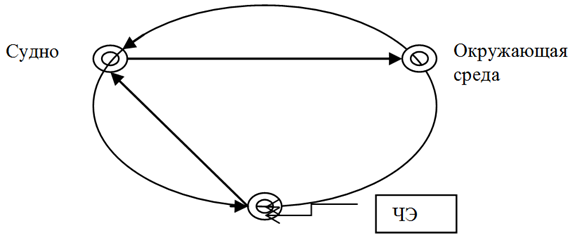
Fig. 1. System “ship - human element - environment”
В рамках этой структуры на множестве элементов X с помощью культуры I взаимодействие структурообразующих факторов образует операции, безопасное выполнение которых обеспечивается управляющими процедурами в общем производственном процессе Y функционирования системы [9, 11–14].
Разбивая общий процесс Y по «слабым» связям между элементами структуры η, получим три важных процесса Y1, Y2, Y3 Î Y : Y1 – процесс между техническим средством и средой; Y2 – процесс между техническим средством и «человеческим элементом»; Y3 – процесс между техническим средством, «человеческим элементом» и средой.
На базе вышеобозначенных процессов составлена обобщенная модель работы Системы на принципах структурно-ассоциативного подхода при условии выполнения параметрического контроля с оценками достоверности этого контроля
и оценками вероятности отказа модели в целом
[8, 15–17] (рис. 2).
Модель определяет понятие состояния безопасной эксплуатации судна, относительно которого следует управлять заданным уровнем безопасности мореплавания.
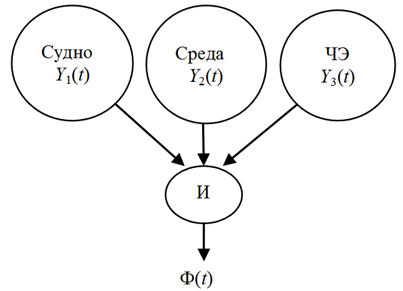
Рис. 2. Структурно-ассоциативная модель
Fig. 2. Structural-associative model of the system
“ship - human element - environment” functioning
Состояния судна в эксплуатации в рамках ассоциативно-структурной системы представляем цепью фазовых переходов
Ф1 → Ф2 → Ф3 → … → Фm, m → N.
С введением индикаторной функции вида
![]()
где Φ0 – состояние судна, отвечающее норме «хорошая морская практика».
После преобразований получим равенство
![]()
Отсюда вероятность безопасного эксплуатационного состояния судна Φ(t) Í Φ0 можно получить через «хорошо» определенное значение p1. В рамках теоремы Боголюбова временную последовательность фазовых переходов на выходе системы (рис. 2) следует наделять свойствами стационарности и эргодичности. Используя гипотезу о полной вероятности сложного события Φ(t), можно получить вероятность p2 события Φm Ë Φ0, когда эксплуатационное состояние судна не отвечает условиям безопасного мореплавания [1, 2, 18].
Таким образом, область фазовых переходов состояний модели Системы обладает двумя точками плотности. И чтобы обеспечивать состояния безопасной эксплуатации судна, необходимо минимизировать значение вероятности опасных переходов p2, управляя процессами Y1, Y2, Y3 Î Y, например управляя состояниями ассоциаций «человеческий элемент» и «судно», целенаправленно используя управляющие процедуры и выделенный ресурс. Такое поддержание в ассоциациях требований международных конвенций, региональных и национальных норм и правил без изменения логического оператора связи и ассоциаций является признаком диссипативности ассоциативно-структурной Системы (рис. 2) в целом.
На элементах теории диссипативных систем дано описание динамики навигационного происшествия, сформированного в виде переходов состояний судна: «безопасное – критическое – аварийное». Судоводитель фиксирует ситуацию на множестве текущих факторов {S}, включающих области безопасной {S}В и опасной {S}0 навигационной ситуации. Так, если лицо, принимающее решения (ЛПР), не способно оценить ситуацию
и выбрать управления или для управления недостаточно ресурсов, то возможен переход в точку плотности области аварийных ситуаций. Для исключения такого перехода была составлена модель механизма выбора последовательности управлений (управляющих процедур) u(r) Î U(R) на базе абстрактных логических подсистем с общими функциями для таких систем. Связь механизма выбора управляющих процедур и прогноза соответствующих рисков можно представить циклическим направленным графом.
Система (рис. 2) допускает независимые отдельные отказы технических средств, организационные сбои и ошибки «человеческого элемента». При этом ее надежность определяется вероятностью появления аварийных ситуаций за определенный период времени. Для оценки такой надежности составлена модель многопараметрического интервального контроля состояния судна и разработана методика оценки вероятности появления критических ситуаций с последствиями и без
последствий.
Описание процесса анализа и синтеза сценариев операций по переводу судна из состояния субстандартности в безопасное состояние
с оценкой возможных затрат
Сценарий судовой операции задается в лингвистическом виде, представляет собой описание целенаправленных действий человека с использованием ресурса при минимальной избыточности» [16]
и формализуется с помощью контентного анализа [2] K ~ mod Π как категория, эквивалентная набору лингвистически описанных признаков, образующих теорию сценария перехода состояний судна. Сценарий формируется согласно результатам оценки непротиворечивости и согласованности элементов теории K (требования к информации)
и воспроизводит мнения всех специалистов, для чего используется статистическая модель вероятности точных суждений экспертов.
Тогда в границах составленного сценария любую операцию, проходящую на включенном в Систему судне, можно рассматривать как структурированное явление
![]()
где Σ – отображение словесных признаков Π
в структуре, состоящей из: P0 – множество элементов технических средств, специалистов и их связей; S – множество правил по выполнению переходов; Q – множество действий при переходе объекта управления из состояния в состояние.
В рамках структуры «человеческий элемент» может изменить порядок выполнения судовой операции. Однако «свобода» действий человека при выполнении судовой операции ограничивается как ее наблюдаемостью, так и имеемым ресурсом [1–3, 8, 16–22].
Механизм выбора последовательности действий u = {ui} в операции осуществляется в рамках принятой ЛПР информации. Устанавливаем структуру векторов действий: текущего – λi, планового – xi
и в i-й операции – yi = {yij}. В планируемой операции вектора действия yi = xi должны быть идентичны, т. е. ui : ui = (λi, xi). Тогда и в Системе (1) множество векторов в операции запланированных Xi(ri) и действий Yi(ri) должно совпадать, а множество реализуемых плановых векторов судовых операций соответствует множеству равенств состояний Системы вида X(r) : X(r) = Y(r).
С учетом концепции ФОБ, МКУБ и ограничений «человеческого элемента» механизм выбора последовательности действий позволяет представить два варианта процесса синтеза операции.
В первом варианте синтеза операции с назначением векторов – планового и текущего – вектор действий в операции yi* будет «обязательно» реализовываться выгодным путем. Ограничивая его реализацию y* = {yi*} в операции, будет реализовываться жесткий выбор действий, отвечающих рекомендациям и требованиям ИМО, например. Это может привести к появлению недостоверной информации, снижающей качество выполнения этой операции. Во втором варианте синтеза операции ориентация должна быть осуществлена за счет ограничений, накладываемых на целевую функцию,
и учета перспектив при несовпадении вектора реализации операции и планового вектора операции
xi ≠ yi, i Î I, что может привести к отношению
fi(λ, xi, yi) < fi(λ, yi, yi), когда целевая функция при текущем действии yi будет наибольшей. Такое же отношение будет и для всех целевых функций операций, используемых в Системе (см. рис. 1)
Ф(λ, x, y) < Ф(λ, y, y).
Снизить влияние недостоверной информации или несовпадения векторов x ≠ y можно за счет привлечения элементов культуры наказания, включенной в систему администрирования, принятой в компании. Однако при любом варианте синтеза операции ее механизм работы должен обладать ресурсом и может быть представлен цепочкой (последовательностью) действий человека, формализованной с помощью типовых операционных
и структурных описаний, а также логических схем в виде череды операторов и логических условий.
Перечислим этапы процесса взаимодействия системообразующих факторов в виде операций
в границах принятой модели Системы:
– сбор и обработка сообщений, по которым «человеческий элемент» формирует оценки s = {si} параметров ресурса r = {ri};
– планирование «человеческим элементом» действий, характеризуемых векторами: текущим λ(s)
и плановым x(s) в рамках механизма выбора η(s);
– выбор вектора действия yi из множества Zi(xi(s), ri, i Î I) (с учетом дополнительных ограничений) с последующей оценкой значений целевых функций операций.
Гармонизация отношений между множеством действий при выполнении операций и имеемыми ресурсными возможностями отражают принцип – экономическая эффективность ограничена рамками безопасной эксплуатации судов. Оптимизация функционала вида:
![]()
где C – общие расходы на безопасное выполнение операции; s'(rj) – расходы при выделении ресурса
с текущим эксплуатационным параметром способности rj; s''(rj) – потери при выполнении аварийных операций; N – число действий в операции, создающих стоимость выделяемого ресурса управления s. Она разрешает задачи гармоничного выбора ресурса управления для безопасного проведения операции и определяет два варианта: первый предполагает, что расходы на его получение не лимитированы; вторым устанавливается квота на получение
ресурсов, отвечающих оптимальным затратам.
Взаимодействие судна и окружающей среды в Системе
Предложен механизм формирования процедур управления судовыми операциями на примере процесса маневрирования судна. При описании этого процесса использовались флуктуирующие аддитивные и мультипликативные модели судна, а также преобразования оперативных действий в рекомендуемые управления «человеческого элемента»,
в границах которых использована структура
![]() (2)
(2)
В данном случае процедура управления состоянием судна MU при его маневрировании представляет собой последовательность действий Y «человеческого элемента» в операции управления U состоянием судна, подкрепленных ресурсом G
и направленных на реализацию заданной цели R
в структуре η (2) в рамках I – системы отношений и правил, обеспечивающих однозначность между действиями Y и управлениями U [4–6].
Для исследования модели преобразования ресурса в состояние безопасной эксплуатации судна за счет квалифицированного труда и знаний «человеческого элемента» была рассмотрена перестройка сложных структур и процессов (2) в виде упрощенной модели, по которой было составлено логическое преобразование действий в управления
[6, 10, 15, 23], как выполнение технологии преобразования действий в процедуру управления безопасной судовой операции z Î Z Í R × U × G Ì I:
где η0 Î η – упрощенная структура; J Ì I – включает конкретную алгебру и систему отношений одинаковости; U0 – планомерное управление; Y0 – последовательность действий.
Фиксируя начальное и конечное управления, можно преобразовать эту модель в систему (Y0, U0, L) с фиксированным входом и выходом и выделить оператор L Î (Y0 × U0) как множество операторов, преобразующих входные воздействия Y0 в реакцию системы – выходные управления U0. Оператор можно сопоставить с математической моделью
в виде феноменологического дифференциального уравнения
![]()
где y – изменение ресурса на создание элемента безопасности; С – коэффициент жесткости процесса (затраты на создание новой ценности и время на выполнение процесса); T – коэффициент организационного сопротивления (затраты на подготовку, технологии, оборудование, настройки); М – инерционный коэффициент (затраты на обеспечение ресурсами, планирование). Модель процесса преобразования действий в управление предусматривает выполнение действий по планированию, координации и выполнению процесса [10, 11].
Кроме того, при информационной самодостаточности системы множество элементов и их связи в ней способны к самоорганизации без поступления дополнительной информации, т. е. образуют консервативную по информации систему. Поэтому механизм прогнозирования исхода управления навигационными событиями можно рассматривать как информационную модель процесса, реализованную в сознании судоводителя и составленную им самостоятельно [10, 15, 16, 23]. Структурные избыточность и изменчивость системы универсализируют механизм прогноза результата управления, но могут и затруднить его практическое использование [5].
В универсальной модели маневрирующего судна основную информацию дают взаимодействия важных элементов на значимых связях, не исключая информацию, поступающую из «среды управления». Поэтому в рамках методики бинарной декомпозиции состояния судна были составлены описания как открытого, так и закрытого по информации математического объекта. Универсализация модели маневрирующего судна расширяет возможности прогноза состояния судна и минимизирует риски. В то же время может «размывать» распределения вероятных траекторий управления
и состояние маневрирующего судна, что снижает эффективность прогноза безопасности операции. Универсальная модель судна позволяет выделять основные факторы состояния операций и составить процедуру управления маневрированием с учетом критерия минимума рисков [1–4, 8, 17, 18, 21, 22].
Таким образом, для составления процедуры управления маневрирующим судном следует определить пути снижения производственных издержек и предложить наилучший способ преобразования действий, выделенных в сценарии операции,
в управления. При этом составленная управленческая процедура должна реализовать поставленную цель с максимальной прибылью при минимальных по количеству и величине рисках.
Особенности управления состоянием безопасности в Системе
Эффективное и безопасное состояние судовых операций может быть обеспечено управленческими процедурами в виде логических программ, представляемых как долго действующие связи
в Системе между техническим средством и экипажем [7, 11, 19, 20, 24, 25]. Такие программы должны учитывать принятую в компании культуру управления и реализовываться в рамках программно-целевого подхода (ПЦП), что сводит процесс управления к типовым этапам. Если рассматривать действия экипажа при поддержании эффективного и безопасного состояния судовой операции как логическую программу управлений с реализацией глобальной цели (осуществлять принятую в компании стратегию безопасности), то процедуру управления состоянием судовой операции можно представить отображением [2, 17]
![]() (3)
(3)
где Ξ0 – отображение механизма реализации MF* логической программы с учетом выделенных рисков как процедуры управления операциями;
G – ограниченный управленческий ресурс;
Q – последовательность управлений с учетом перечня возможных рисков.
Процедура управления в виде логической программы (3) реализуется как прямое произведение евклидовых пространств ресурсов и управлений
G0 × Q1 × G1 × Q2 × ... × GN × QN с элементами g0, q1, g1, q2, ..., gN, qN, задаваясь множеством BN чередования элементов < g0, q1, g1, q2, ..., gN, qN >, тогда взаимодействие элементов самой программы можно рассматривать как процесс типа «управление – ресурс» до момента получения результата, закрепленного целевой функцией судовой операции.
Множество установленного чередования управлений и ресурсов BN ограничивает реализацию процедур управления судовой операцией, составить оптимальную процедуру операции для ограниченного ресурса G можно при условии минимальной стоимости функционала вида
![]()
где R1 – числовой ряд от 0 до бесконечности;
BN – множество урегулированных чередований элементов типа < g0, q1, g1, q2, ..., gN, qN >.
Составить сбалансированную процедуру управления с внутренними прямыми и обратными рекуррентными связями можно, если на отдельных временных интервалах связанная пара «управление – ресурс» будет обладать свойством однородности на уровне сбалансированности отношения «управление – ресурс». При наличии таких однородностей процедура управления в виде отображения (3) способна обладать свойством логической программы. Причем такая логическая программа должна обладать наилучшим отношением сбалансированности в сечениях (по ансамблю) и транзитивностью этого отношения по времени (рис. 3).

Рис. 3. Связанная пара состояний «управление – ресурс» в процедуре U на интервале Тj,
подтверждающая принадлежность к классу логических программ
Fig. 3. Connected pair of states “control - resource” in the procedure U on the interval Tj confirming status
of logical programs
Для подтверждения принадлежности (3) сбалансированной процедуры к классу логических программ динамику признака сбалансированной связанной пары состояний «управление – ресурс» представим моделью в виде системы нелинейных дифференциальных уравнений
![]() (4)
(4)
где Y – n-мерный вектор {у1, у2, …, уn} параметров состояния эксплуатационной безопасности при реализации судовой процедуры в интервале Тj
с управлением в состоянии Uj, где t Î Tj; F – нелинейная вектор-функция {f1, f2, …, fn}т; A – матрица с фиксированными элементами; h(t) – процесс характеризует состояние безопасности операции на интервале Tj и задан в области Lr; F(t, Y, z) – функция, определенная в области Lr.
Если процесс h(t) характеризует состояние операции на интервале времени Tj в области Lr, а функция F(t, Y, z) определена в этой же области Lr, то на замкнутом фазовом пространстве Φ в области точки плотности Y0 Î Φ почти однородного управления Uj математическое ожидание отклонений состояния операции управления от безопасного можно оценить так:
![]() (5)
(5)
где С = const; ρ1 и ε – детерминированные и случайные метрики; Y(t) – состояние эксплуатационной безопасности.
Из выражения (5) следует, что состояние эксплуатационной безопасности Y(t) при переходах сбалансированной процедуры от одного управления к другому будет обладать точкой плотности Y0. Такая точка плотности состояний операции, связанная с процедурными управлениями Uj Î U состоянием операции, характерна тем, что все интегральные кривые уравнения (4) стремятся к ней. Такого рода сходимость можно оценить пределом отношения M[ρ(Y)] / t математического ожидания состояний операции от принятого безопасного состояния. Подобное поведение интегральных кривых свидетельствует о свойстве равномерной сходимости траекторий, которое подчеркивает однозначность состояния эксплуатационной безопасности Y0 с управлением Uj и детерминированность управления Uj на интервале времени Tj.
Таким образом, сбалансированная процедура управления судовыми операциями (3) полностью отвечает признакам логической программы и ориентирована на достоверную информацию о системообразующих факторах, поскольку управления Uj не только случайно распределены на интервале времени Тj, j Î J, но и задаются на этом интервале с вероятностью, равной единице [23] (рис. 4).
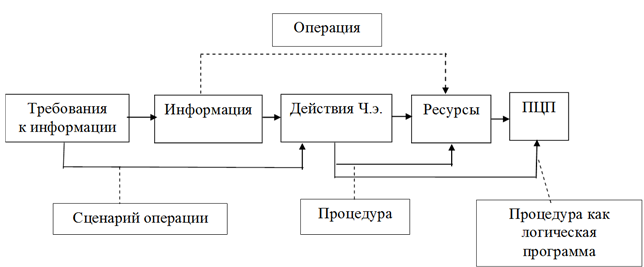
Рис. 4. Схема формирования сбалансированной процедуры управления судовыми операциями,
отвечающая признакам логической программы
Fig. 4. Diagram of developing a balanced procedure for the ship operation control meeting the features of a logical program
При качественных или количественных изменениях системообразующих факторов или при возможном появлении нежелательных вариантов развития судовой операции необходимо расширение процедур управления с описанием дополнительно технических средств и ресурса. Процесс такой актуализации может быть представлен в виде дополнительного цикла в алгоритме (рис. 5).
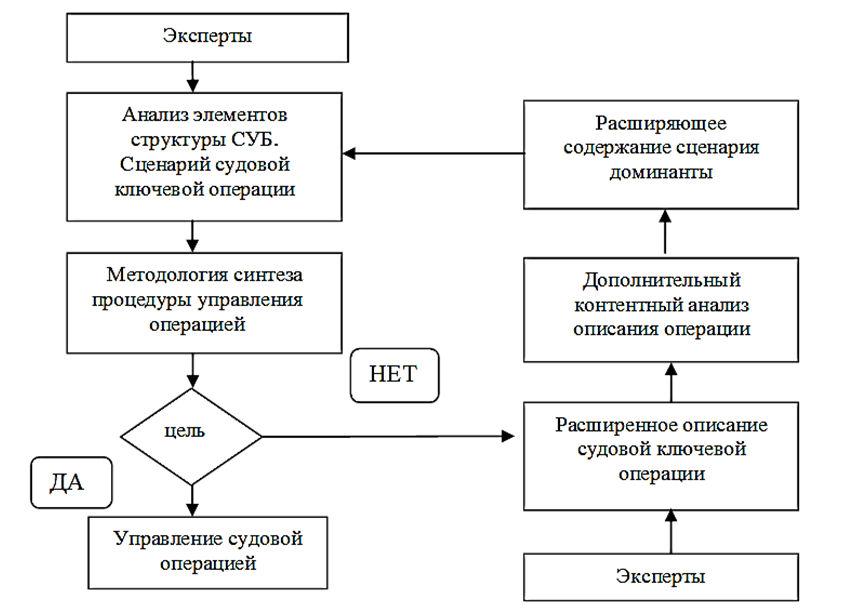
Рис. 5. Алгоритм актуализации операций и процедур управления состоянием судна
Fig. 5. Algorithm for updating operations and procedures for the vessel state control
Внедрение алгоритма (рис. 5) с процедурой управления в программный продукт судовой экспертной системы позволит целенаправленно выбирать наиболее опасные потенциальные риски, нивелировать их влияния на состояние судовой операции и снижать степень их влияния на аварийность судов.
Заключение
Теоретические положения и методы анализа
и синтеза операций и процедур управления можно квалифицировать как новое и достаточно существенное достижение в методологии эксплуатации систем управления безопасностью судов, отвечающих требованиям применимых международных морских конвенций и кодексов к ним. Составленное представление о процессах, идущих в структурах безопасной эксплуатации судов и обусловленных внешними или внутренними воздействиями на структурообразующие факторы, приводит к изменению состояний – фазовым переходам этих факторов, что позволяет выделить ряд направлений
в исследованиях, которые способны повысить уровень безопасной эксплуатации судов в компаниях, в частности:
– направление по анализу моделей Системы, составленных на базе ассоциативно-структурного подхода при неизменном логическом операторе связи между системообразующими факторами;
– направление по минимизации вероятности опасных фазовых переходов в Системе целенаправленным использованием выделенного ресурса и проведением многопараметрического контроля;
– направление по разработке правил анализа
и синтеза сценариев операций и процедур управления состоянием судна с оценкой затрат для случаев, когда операции заданы лингвистической теорией по результатам контентного анализа;
– направление по исследованию процесса функционирования организационной модели судовой операции, которая определяет деятельность судового экипажа в границах системы и подразумевает право «человеческого элемента» на жесткий и нежесткий выбор вектора управления;
– направление, в котором рассматриваются принципы составления оптимальных по затратам процедур управления с учетом гармонизации отношений между множеством действий и имеющимися возможностями судовых ресурсов;
– направление, связанное с внедрением и практическим использованием процедур, представленных в рамках ПЦП и составленных в виде логических программ, действующих на связях в Системе;
– направление, связанное с процессом составления алгоритмов актуализации, позволяющих дополнительно вводить в сценарии операций
и процедуры управления, не учитываемые ранее системообразующие факторы.
Предложенные направления исследований позволят уменьшить влияние «человеческого элемента» при выработке решений по управлению судном. Модели судовых операций и процедур управления, разработанные в рамках предложенных выше направлений, могут быть использованы при составлении программного обеспечения экспертных систем. Такого рода системы позволят обеспечивать комплексную поддержку процессов принятия решений в области обеспечения безопасной эксплуатации судов.
1. Men'shikov V. I. Metrologicheskaya nadezhnost' navigacii s uchetom nepolnoty informacii: avtoref. dis. … d-ra tehn. nauk. SPb., 1995. 40 s.
2. Men'shikov V. I., Anisimov A. N., Furgasa Desalen' Merdasa. Sistema upravleniya s pozicii celenapravlennogo deystviya // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2000. T. 3. № 1. S. 7-12.
3. Kukui F. D., Anisimov A. N., Anisimov A. A. Osnovnye processy v strukturah bezopasnoy ekspluatacii sudna / pod red. V. I. Men'shikova. Murmansk: Izd-vo MGTU, 2008. 185 s.
4. Pen'kovskaya K. V. Zhivuchest' struktur bezopas-nosti moreplavaniya s uchetom chelovecheskogo faktora: avtoref. dis. … kand. tehn. nauk. Murmansk, 2007. 22 s.
5. Chkoniya V. A., Men'shikov V. I. Ocenka dosto-vernosti predstavleniya bazy dannyh sudovomu specialistu v integrirovannoy sisteme hodovogo mostika // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2003. T. 6. № 1. S. 81-86.
6. Yudin Yu. I. Problema sinteza modeley meha-nizma predvideniya dlya ekspertnyh sistem, obespechivayuschih bezopasnuyu ekspluataciyu sudna: avtoref. dis. … d-ra tehn. nauk. Murmansk, 2007. 47 s.
7. Anisimov A. N., Men'shikov V. I. Sudovaya klyu-chevaya operaciya - svyazannaya para «priznak-sostoyanie» // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2003. T. 6. № 1. S. 3-8.
8. Men'shikov V. I., Gluschenko V. M., Anisimov A. N. Elementy teorii upravleniya bezopasnost'yu sudohodstva. Murmansk: Izd-vo MGTU, 2000. 242 s.
9. Ershov A. A. Teoreticheskie osnovy i metody resheniya prioritetnyh problem bezopasnosti moreplavaniya: avtoref. dis. … d-ra tehn. nauk. SPb., 2000. 44 s.
10. Zheleznov I. G. Slozhnye tehnicheskie sistemy: ocenka harakteristik. M.: Vyssh. shk., 1984. 119 s.
11. Arkin V. I., Kolemanov V. A., Shiryaev A. N. O nahozhdenii optimal'nyh upravleniy // Tr. Matem. in-ta im. V. A. Steklova Ros. akad. nauk. 1964. T. 71. S. 21-25.
12. Anisimov A. N., Men'shikov V. I., Razvozov S. Yu. Struktura sistemy bezopasnosti moreplavaniya v ramkah teorii fazovyh perehodov // Zhurn. Un-ta vod. kommunikaciy. 2013. Vyp. 2 (18). S. 109-115.
13. Voronov A. A. Ustoychivost', upravlyaemost', nablyudaemost'. M.: Nauka, 1979. 336 s.
14. Dubrov Yu. I. Teoretiko-informacionnyy pod-hod v zadachah ocenki kachestva funkcionirovaniya slozhnyh sistem: dis. ... d-ra tehn. nauk. Dnepropetrovsk, 1991. 418 s.
15. Lanchukovskiy V. Formal'naya ocenka i progno-zirovanie bezopasnosti tehnicheskoy ekspluatacii sudna // Sudohodstvo. 2002. № 6. S. 9-10.
16. Loginovskiy V. A. Primenenie preobrazovaniy podobiya dlya analiza i obrabotki navigacionnoy informacii: avtoref. dis. … d-ra tehn. nauk. SPb., 1991. 47 s.
17. Men'shikov V. I., Eremin M. M. Dostovernost' kontrolya sostoyaniya bezopasnosti navigacii pri neiz-bytochnom chisle parametrov // Vestn. MGTU. Tr. Mur-mansk. gos. tehn. un-ta. 2006. T. 9. № 2. S. 281-286.
18. Men'shikov V. I., Pasechnikov M. A., Men'shikova K. V., Gladyshevskiy M. A. Organizovannost' sociotehnicheskoy sistemy, obespechivayuschey podderzhanie zadannogo urovnya sostoyaniya bezopasnoy ekspluatacii sudna // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2006. T. 9. № 2. S. 268-281.
19. Akoff R., Sasieni M. Osnovy issledovaniya operaciy / per. s angl. V. Ya. Altaeva. M.: Mir, 1971. 534 s.
20. Ayzerman M. A., Malishevskiy A. V. Nekotorye aspekty obschey teorii vybora luchshih variantov // Avtomatika i telemehanika. 1981. № 2. S. 65-83.
21. Men'shikov V. I., Chkoniya V. A. Klassifikaciya faktorov, soputstvuyuschih oshibkam v deyatel'nosti morskih specialistov // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2003. T. 6. № 1. S. 75-80.
22. Men'shikov V. I., Ramkov I. A., Ryabchenko R. B. Samokontrol' pri vospriyatii navigacionnoy informacii v strukturah bezopasnogo moreplavaniya // Ekspluataciya mor. transp. 2010. № 2 (60). S. 45-47.
23. Zubov V. I. Teoriya optimal'nogo upravleniya. L.: Sudostroenie, 1966. 351 s.
24. Anisimov A. N., Men'shikov V. I., Furgasa Desalen' Mardasa. Model' mnogoparametricheskogo kontrolya sostoyaniya bezopasnoy ekspluatacii sudna i ee strukturnyy analiz // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2007. T. 10. № 4. S. 594-599.
25. Anisimov A. N., Anisimov A. A., Butakov A. A., Men'shikov V. I. Dissipativnoe associativno-strukturnoe opisanie sistemy bezopasnosti i ee funkcionirovanie v ramkah teorii fazovyh perehodov // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 2013. T. 16. № 1. S. 13-16.
