












Россия
Россия
Россия
Исследование вентильного электропривода (ВЭП) приобрело особое значение в настоящее время, поскольку ВЭП используется практически во всех беспилотных и безэкипажных транспортных средствах. Рассматривается влияние конструктивных особенностей синхронной магнитоэлектрической машины (СММ), структурных особенностей ВЭП и алгоритмических особенностей вентильной машины (ВМ) на методику анализа и характеристики мехатронной системы, включающей все перечисленные выше блоки. Представлены примеры конструкций явнополюсных роторов, схемы двухконтурного и трехконтурного ВЭП с токовым управлением ВМ в неподвижной системе координат. Перечисленные конструктивные, структурные и алгоритмические особенности рассматриваются применительно к ВЭП, который нашел широкое применение в промышленности, на транспорте (воздушном, наземном, надводным и подводном), и в приборных системах управления различными объектами. Вентильный электропривод позволяет формировать необходимые переходные и установившиеся процессы, удовлетворяющие самым разнообразным технологическим задачам. При построении ВЭП достигнуты высокие технические показатели благодаря применению высокоэнергетических магнитов в СММ. Представлены электромагнитные, электромеханические и энергетические характеристики ВЭП, которые рассчитываются с использованием геометрических соотношений векторной диаграммы. Приведено описание алгоритмических особенностей управления ВМ в ВЭП, а также методы математического описания СММ, которые основываются на методе основной гармоники, предложенном А. А. Булгаковым, и результирующего (обобщенного) вектора. Описание включает преобразования Ковача и Раца, преобразования Парка – Горева и преобразование Кларка. Рассматриваются алгоритмы управления ВМ на основе управления полем ротора и полем воздушного зазора, обосновывается выбор оптимального алгоритма. Представлены основные выводы при выполнении модельного исследование ВЭП.
синхронная машина, вентильный электропривод, полупроводниковый преобразователь, магнитоэлектрический ротор, моделирование
Введение
Анализ проблем, связанных с исследованием и построением вентильных электроприводов (ВЭП) показывает, что в современных ВЭП существуют пока еще недоиспользованные резервы повышения энергетической эффективности электромагнитного и электромеханического преобразования энергии. Полная реализация потенциала повышения эффективности энергетических преобразований достигается посредством оптимизации эксплуатационных режимов электрической машины. Данная оптимизация осуществляется путем адаптивного регулирования выходных параметров (напряжения или тока) полупроводникового преобразователя с учетом их функциональной зависимости от скорости вращения и электромагнитного момента.
Конструктивные особенности синхронных магнитоэлектрических машин
В соответствии с терминологией, принятой в отечественной литературе, синхронная машина с постоянными редкоземельными магнитами на роторе относится к синхронным магнитоэлектрическим машинам (СММ). Конструкции таких машин самые разнообразные [1]. Первоначально следует остановиться на особенностях конструктивного исполнения магнитопровода СММ и ее якорных обмоток. Конструктивно обмотки якоря можно разделить на два типа:
1. Распределенная обмотка (рис. 1, а).
2. Сосредоточенная обмотка (рис. 1, б).
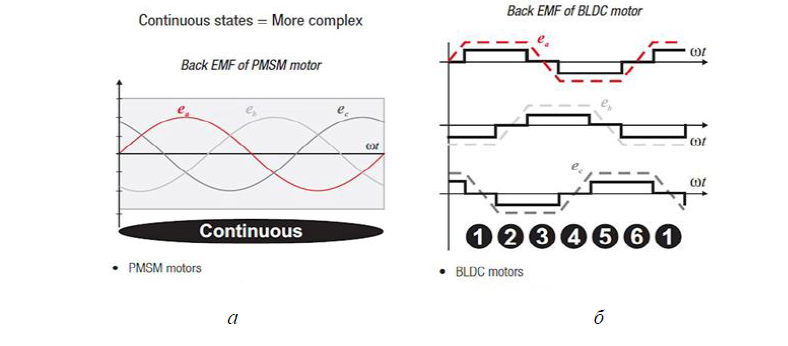
В варианте с распределенной обмоткой потокосцепление машины распределено вдоль воздушного зазора по закону, близкому к синусоидальному [2], что требует формирования синусоидальных токов в фазных обмотках машины (рис. 2, a). Эти машины в отечественной литературе получили название СММ, в англоязычной терминологии их называют Permanent Magnet Synchronous Machine (PMSM). В совокупности с активным полупроводниковым преобразователем (АПП) такого рода конструкции чаще всего называют вентильными машинами (ВМ), а электропривод, построенный с использованием ВМ, – ВЭП.
В варианте с сосредоточенной якорной обмоткой потокосцепление машины распределено вдоль воздушного зазора практически по трапецеидальному закону (рис. 2, б), что требует формирования прямоугольных токов в фазных обмотках машины длительностью в 120 электрических градусов [2]. Такие машины в отечественной литературе названы бесконтактными двигателями постоянного тока (БДПТ), в англоязычной терминологии они получили название Brushless Direct Current (BLDC). Схематично способы укладки обмоток на статоре СММ и БДПТ показаны на рис. 1, а распределение электродвижущей силы (ЭДС) в обмотках якоря – на рис. 2.

Рис. 1. Способы укладки обмоток на статоре СММ: а – с распределенной якорной обмоткой (основа – ВМ); б – с сосредоточенной якорной обмоткой (основа – БДПТ)
Fig. 1. Methods of laying windings on the PMSM stator: a – with a distributed armature winding (base – VM); б – with a concentrated armature winding (base – BLDC)
а б
Рис. 2. Распределение ЭДС на обмотках якоря: а – СММ; б – БДПТ
Fig. 2. EMF distribution on armature windings: a – PMSM; б – BLDC
Магнитоэлектрический ротор СММ конструктивно выполняется в двух вариантах:
1. Явнополюсный.
2. Неявнополюсный.
В современных СММ явнополюсность обычно достигается путем утопления постоянных высококоэрцитивных магнитов в магнитомягкий ферромагнитный материал ротора или специальными ферромагнитными вставками (вырезами) в роторе. В неявнополюсных СММ магниты наклеиваются на ферромагнитный ротор. В явнополюсных конструкциях разница в параметрах (в индуктивностях якоря Ld и Lq) по продольной оси (d-совпадающей с направлением магнитного поля возбуждения) и поперечной оси (q-перпендикулярной направлению магнитного поля возбуждения) может быть как положительной, так и отрицательной. На рис. 3 приведены примеры конструкций роторов таких машин при соотношении параметров Ld > Lq [3].
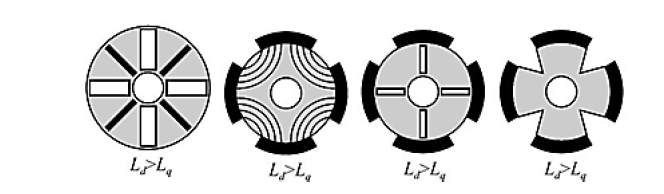
Рис. 3. Примеры конструкций явнополюсных роторов СММ
Fig. 3. Examples of designs of single-pole PMSM rotors
Структурные особенности ВЭП
Состав ВЭП:
– ВМ;
– источник питания постоянного тока – источник электрической энергии (ИЭЭ);
– система управления ВЭП, реализующая определенный алгоритм, оптимизированный по выбранному критерию.
Структурно ВЭП можно разделить на два типа. Первая схема (рис. 4) дополнительно с ВМ включает регулятор скорости (РС). В этой структуре АПП выполняет функцию регулируемого источника напряжения за счет широтно-импульсной модуляции (ШИМ) [4]. При этом система управления в ВЭП содержит только РС.
Во второй структуре (рис. 5) кроме РС используется дополнительный гистерезисный регулятор тока (ГРТ) в структуре ВМ. Этот ГРТ управляется от системы управления вентильной машиной (СУВМ), содержащей в свою очередь вычислитель скорости и угла (ВСУ) и преобразователя Кларка (ПК).
В рамках архитектуры ВЭП (рис. 5) обратная связь по току реализована в стационарной системе координат. При этом регулятор тока представляет собой релейное устройство с гистерезисной характеристикой (ГРТ), что позволяет достичь скользящего токового режима работы АПП. Подобный метод управления нередко классифицируется как «вынужденное» [5].
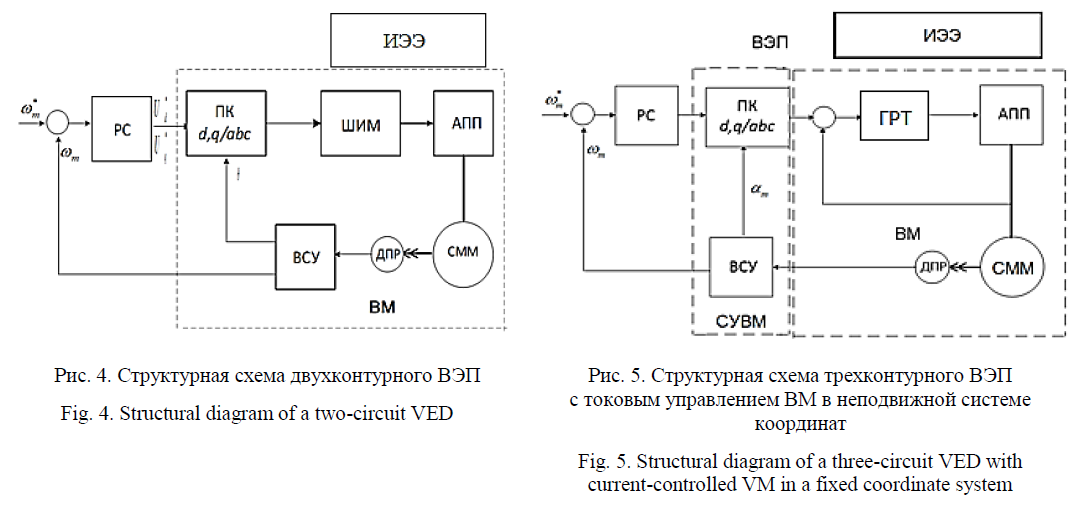
Особенность вынужденного управления состоит в том, что АПП представляет собой управляемый источник тока, а несущая частота генерируется самой системой. Такое управление обеспечивает векторно-импульсную модуляцию (ВИМ) АПП. Управление АПП с гистерезисной обратной связью по току иногда называют токовым управлением, один из основоположников теории ВЭП профессор Ю. И. Конев называл режим работы АПП с релейным регулятором тока «токовым коридором» [6].
Также регулирование тока можно реализовать в динамической системе координат, а именно во вращающейся. При этом линейный регулятор тока (РТ) разрабатывается с применением классических методов синтеза непрерывных систем. Важно отметить, что в данной конфигурации автономный преобразователь напряжения (АПН) функционирует как управляемый источник тока, где регулирование выходного тока достигается посредством ШИМ выходного напряжения.
Необходимо отметить, что структурные различия токового контура не оказывают существенного воздействия ни на методологию анализа, ни на расчетные значения электромагнитных, электромеханических и энергетических характеристик ВЭП. Данные различия проявляются исключительно в частоте коммутации транзисторов АПП, что приводит к возникновению незначительных дополнительных потерь. Потенциально это явление может быть исследовано посредством виртуального моделирования.
Алгоритмические особенности управления ВМ в ВЭП
Вентильная машина, эквивалентная электрическая схема замещения которой приведена на рис. 6, в своем составе содержит:
– ИЭЭ – источник питания постоянного напряжения;
– АПП со схемой управления (СУАПП);
– СММ, управляемую от этого преобразователя;
– датчик положения ротора (ДПР), в функции которого входит синхронизация и фазирование работы СУАПП.
Перечисленные функциональные блоки при объединении образуют ВМ при распределенной якорной обмотке или бесконтактную машину постоянного тока (БМПТ) при сосредоточенной якорной обмотке.
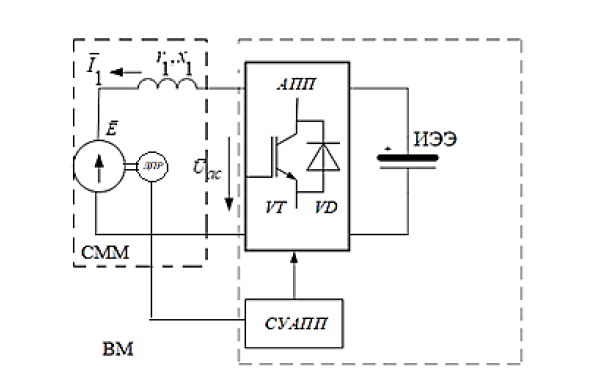
Рис. 6. Эквивалентная электрическая схема замещения ВМ
Fig. 6. Equivalent electrical circuit for VM replacement
Основы математического описания СММ:
1. Метод результирующего (обобщенного) вектора [3], позволяющего трехфазные симметричные напряжения, токи и потокосцепления в машине представить отдельными результирующими (обобщенными) векторами в комплексной плоскости, оси которой (вещественная d и мнимая q) вращаются синхронно с ротором ВМ, при этом ось d совмещается с осью магнитного поля возбуждения и называется продольной, а ось q совмещается с ЭДС якоря и называется поперечной.
2. Согласно методу основной гармоники, предложенному А. А. Булгаковым [7], главные электромагнитные, электромеханические и энергетические свойства систем [8], использующих полупроводниковые преобразователи, определяются передачей и обменом мощностью на основной (моделирующей) частоте. В то время как обмен энергией на высокой частоте переключения транзисторов
в АПП приводит к пульсациям напряжения и тока и небольшим дополнительным потерям, именно основная гармоника является определяющим фактором для характеристик системы.
3. Преобразования Ковача и Раца [9], преобразования Парка – Горева и преобразование Кларка [10], которые связывают переменные в различных системах координат (вращающейся, неподвижной, трехфазной, двухфазной). Основываясь на этих положениях, удается аналитически описать и в дальнейшем исследовать режимы работы ВЭП на основной (моделирующей) частоте – на основной гармонике.
Математическое описание и анализ неявнополюсной СММ (Ld = Lq) с распределенной обмоткой якоря при вынужденном управлении ВМ, в структуре ВЭП с управлением, связанным с полем ротора (УПР).
Математическое описание неявнополюсной ВМ в составе ВЭП во вращающейся системе координат в терминах результирующиx векторов для данной конструкции СММ [9, 11], составленное для цепи переменного тока АПП по второму закону Кирхгоффа, имеет вид:
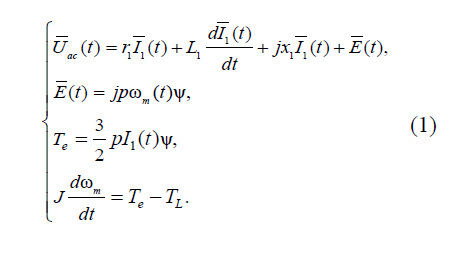
где 
– результирующие векторы переменных состояния ВМ:
 – напряжение на выходных зажимах переменного тока АПП (рис. 7);
– напряжение на выходных зажимах переменного тока АПП (рис. 7); ![]() – ток якоря СММ;
– ток якоря СММ;
![]() – ЭДС якоря СММ.
– ЭДС якоря СММ.
В качестве параметров ВМ в (1) приняты паспортные параметры СММ: r1L1 – сопротивление и индуктивность обмотки якоря СММ; ψ – потокосцепление возбуждения на полюс и фазу в СММ;  – угловая скорость вращения ротора СММ; ω – угловая частота синусоидальных переменных состояния в машине (частота модуляции в ВЭП); x1 = ωL1 – реактивное сопротивление якоря СММ; p – число пар полюсов СММ; Te – электромагнитный момент на валу СММ; J – момент инерции на валу машины.
– угловая скорость вращения ротора СММ; ω – угловая частота синусоидальных переменных состояния в машине (частота модуляции в ВЭП); x1 = ωL1 – реактивное сопротивление якоря СММ; p – число пар полюсов СММ; Te – электромагнитный момент на валу СММ; J – момент инерции на валу машины.
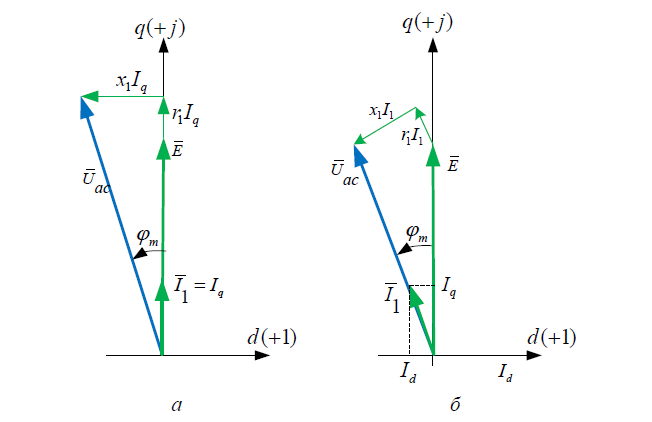
а б
Рис. 7. Векторная диаграмма с неявнополюсной ВМ в ВЭП: а – при управлении, связанном с полем ротора; б – при управлении, связанном с полем воздушного зазора
Fig. 7. Vector diagram with an implicit-pole VM in the VED: a – for control related to the rotor field; б – for control related to the air gap field
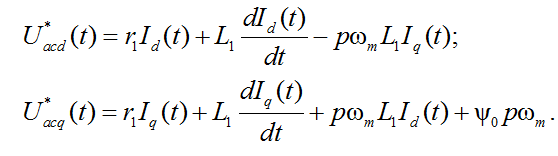
Первое уравнение системы (1), описывающее в терминах результирующих векторов электромагнитные процессы в ВМ, можно представить в проекциях на вещественную (d) и мнимую (q) вращающиеся со скоростью ω оси:
1. Алгоритм управления ВМ, при котором направление результирующего вектора тока якоря СММ ![]() совпадает с направлением противо-ЭДС якоря E1(t) = Eq(t). Такое управление названо УПР, в англоязычных источниках оно получило название Field Oriented Control (FOC) [2, 3].
совпадает с направлением противо-ЭДС якоря E1(t) = Eq(t). Такое управление названо УПР, в англоязычных источниках оно получило название Field Oriented Control (FOC) [2, 3].
2. Алгоритм управления ВМ, при котором направление результирующего вектора тока якоря совпадает с направлением результирующего вектора напряжения якоря. Такое управление названо управлением, связанным с полем воздушного зазора (УПВЗ), его можно назвать оптимальным, поскольку при УПВЗ СММ представляет собой чисто активную нагрузку для АПП.
Оба отмеченных алгоритма реализуются в трехконтурном ВЭП с токовым контуром (см. рис. 5), с управляющими сигналами в которых выступают проекции тока якоря на продольную (d) и поперечную (q) оси ВМ.
Математическое описание ВМ с неявнополюсной СММ в установившемся режиме, которое является основой расчета электромагнитных, электромеханических и энергетических характеристик в ВЭП, составленное на основании системы уравнений (1), для описанных алгоритмов управления ВМ в ВЭП примет вид:
– для ВМ в ВЭП при УПР:
– для ВМ в ВЭП при УПВЗ:
В математическом описании (2), (3) переменные состояния являются величинами векторными, что вызывает необходимость для исследования электромагнитных, электромеханических и энергетических свойств ВМ и ВЭП в установившемся режиме строить векторные диаграммы. Векторная диаграмма отражает физику работы и позволяет рассчитать электромагнитные, электромеханические и энергетические характеристики ВЭП в установившемся режиме. Уравнения (2), (3) служат основой построения векторных диаграмм. Для неявнополюсной ВМ с УПР векторная диаграмма приведена на рис. 7, а, а для УПВЗ – на рис. 7, б.
Геометрические соотношения переменных состояния векторной диаграммы позволяют рассчитать все электромагнитные, электромеханические
и энергетические характеристики ВМ в ВЭП [12]:
1. Сдвиг по фазе между ЭДС якоря и напряжением  на стороне переменного тока АПП (этот сдвиг по фазе здесь назван фазой модуляции).
на стороне переменного тока АПП (этот сдвиг по фазе здесь назван фазой модуляции).
Фаза модуляции (φm)* определяется из геометрических соотношений векторной диаграммы (рис. 8) и равна:
– для УПР:
– для УПВЗ:

После определения фазы модуляции электромагнитные и энергетические характеристики ВЭП рассчитываются, опираясь на геометрические соотношения векторной диаграммы (см. рис. 7).
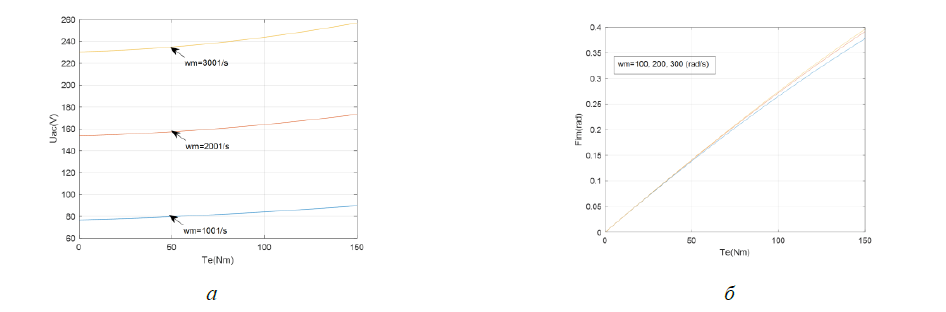
Рис. 8. Электромагнитные (а) и электромеханические (б) характеристики неявнополюсной CММ с вынужденным управлением ВМ в составе ВЭП при управлении, связанном с полем ротора
Fig. 8. Electromagnetic (a) and electromechanical (б) characteristics of an implicit-pole PMSM with forced VM control as part of a VED for control related to the rotor field
Расчет электромагнитных, электромеханических и энергетических характеристик ВЭП
В вентильном электроприводе независимыми переменными режима являются скорость и момент на валу исполнительного двигателя (эти переменные в дальнейшем отмечаются звездочкой в верхнем индексе ![]() . В ВЭП скорость вала исполнительного двигателя
. В ВЭП скорость вала исполнительного двигателя задается входным сигналом и поддерживается РС. Момент на валу исполнительного двигателя (
![]() – Torque), являясь переменной режима, определяется нагрузкой на валу. Электромагнитные, электромеханические и энергетические характеристики ВЭП при УПР рассчитываются с использованием геометрических соотношений векторной диаграммы (см. рис. 7, а) по (4) при заданных переменных режима
– Torque), являясь переменной режима, определяется нагрузкой на валу. Электромагнитные, электромеханические и энергетические характеристики ВЭП при УПР рассчитываются с использованием геометрических соотношений векторной диаграммы (см. рис. 7, а) по (4) при заданных переменных режима ![]() и при выбранном алгоритме управления ВМ (для УПР алгоритма управления СММ Id = 0, Iq = I1) [13]:
и при выбранном алгоритме управления ВМ (для УПР алгоритма управления СММ Id = 0, Iq = I1) [13]:
Электромагнитные и электромеханические характеристики, рассчитанные по (5), представлены на рис. 8. Характеристики (см. рис. 8, а) при УПР свидетельствуют о том, что напряжение на выходе АПП (Uac) в основном зависит от скорости вращения вала ![]() двигателя и незначительно растет при росте момента Te. Угол нагрузки двигателя (Fm) (см. рис. 8, б) зависит в основном от момента на его валу Te и практически не зависит от скорости вращения вала
двигателя и незначительно растет при росте момента Te. Угол нагрузки двигателя (Fm) (см. рис. 8, б) зависит в основном от момента на его валу Te и практически не зависит от скорости вращения вала
![]() двигателя. Активная и реактивная мощности, потребляемые ВЭП, увеличиваются с ростом скорости и момента двигателя.
двигателя. Активная и реактивная мощности, потребляемые ВЭП, увеличиваются с ростом скорости и момента двигателя.
Электромагнитные, электромеханические и энергетические характеристики ВЭП с неявнополюсной СММ в ВМ c вынужденным управлением при УПВЗ в ВЭП рассчитываются с использованием геометрических соотношений векторной диаграммы (см. рис. 7, б) по уравнениям (5). Для компьютерного исследования ВЭП разработана универсальная структурная модель ВЭП [14, 15], позволяющая исследовать переходные и установившиеся электромагнитные, электромеханические и энергетические процессы. Модель позволяет исследовать перечисленные процессы во всех описанных и проанализированных выше конструкциях СММ, структурах ВЭП и алгоритмах управления в ВМ.
Заключение
Особенности конструкции машин обусловливают не только их различные названия, но и различные способы их математического описания, различные способы их управления и различные способы построения электроприводов на их основе. В конструкциях СММ с сосредоточенной якорной обмоткой прямоугольные токи и трапецеидальные потокосцепления БДПТ могут быть представлены рядами Фурье, в которых коэффициенты амплитуды тока и потокосцепления для первых гармоник равны, соответственно, kai = 1,11, kaψ = 1,22 [15]. С учетом этих коэффициентов расчет электромагнитных, электромеханических и энергетических характеристик БДПТ осуществляется так же, как и для ВМ во вращающейся системе координат. Модельное исследование ВЭП при рассмотренных конструктивных вариантах СММ и различных алгоритмах управления ВМ свидетельствует о том, что наибольшее влияние на процессы и характеристики ВЭП оказывает алгоритм управления ВМ. Результаты моделирования планируется опубликовать отдельным материалом.
1. Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974. 168 с.
2. Калачев Ю. Н., Самохвалов Д. В. Основы регулируемого электропривода. Антиучебник. URL: https://privod.news/files/sayt_anti_12_65a.pdf?ysclid=mosjw6k6pg158406303 (дата обращения: 12.02.2026).
3. Калачев Ю. Н., Окулов Е. В. Проектирование электроприводов. URL: https://privod.news/files/kniga1.pdf?ysclid=mosk1eehf8232618105 (дата обращения: 19.02.2026).
4. Oвчинников И. Е. Вентильные электрические двигатели и привод на их основе (курс лекций). СПб.: Корона-Век, 2006. 336 с.
5. Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983. 256 с.
6. Электронная техника в автоматике / под ред. Ю. И. Конева. М.: Сов. радио, 1973. Вып. 5. 136 с.
7. Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970. 320 с.
8. Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006. 272 с.
9. Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. М.; Л.: Госэнергоиздат, 1963. 744 с.
10. Черных И. В. SIMULINK: среда создания инженерных приложений. М.: Диалог-МИФИ, 2004. 496 с.
11. Горев А. А. Переходные процессы синхронной машины. М.; Л.: Госэнергоиздат, 1950. 552 с.
12. Дьяконов В. П. Simulink. Самоучитель. М.: ДМК Пресс, 2015. 781 с.
13. Токарев Л. Н. Математическое описание, расчет и моделирование физических процессов в судовых электростанциях. Л.: Судостроение, 1980. 119 с.
14. Герман-Галкин С. Г. Matlab – Simulink: проектирование мехатронных систем. СПб.: Корона-Век, 2008. 367 с.
15. Герман-Галкин С. Г. Школа MATLAB. Моделирование полупроводникового электропривода в среде Matlab – Simulink. Урок 23. Многовариантный анализ вентильного электропривода c бесконтактным двигателем постоянного тока // Силовая электроника. 2017. № 4. С. 30–37.
