












Россия
Россия
Россия
Россия
УДК 004.89 Прикладные системы искусственного интеллекта. Интеллектуальные системы, обладающие знаниями
Проведена оценка значимости технологии цифровых двойников для дальнейшего развития судоходной отрасли, представлены перспективы и возможные варианты применения этой технологии на морских судах (в частности, для цифрового представления процессов, связанных с навигацией и управлением судном). Показано, что степень сформированности цифрового двойника определяет среди прочего такие его сущностные признаки, как эффективность, точность, полноценность, адекватность и релевантность, которые так или иначе упоминаются во всем многообразии существующих развернутых определений термина «цифровой двойник» без сопровождения какими-либо измеримыми характеристиками. С использованием в качестве теоретико-методологической базы исследований содержания таких понятий, как «процесс», «эксплуатационный процесс судна», «эксплуатационный процессный цифровой двойник судна» (DTO), приведено обоснование методики определения адекватности (полноты, степени сформированности) DTO как совокупности векторного пространства входных векторов параметров и векторного пространства векторов характеристик процесса. При этом адекватность дифференцирована на формальную, при которой поступающая в цифровой двойник информация принимается во внимание равнозначной, и парциальную, учитывающую вес каждого наполняемого цифровой двойник элемента. Обоснованы критерий и методика исключения из векторного пространства параметров безадресных векторов, полученных в результате физически неразумного сочетания значений и не имеющих отображения в векторном пространстве характеристик. В итоге разработанная методика оценки парциальной адекватности эксплуатационного процессного цифрового двойника судна основана на сигмоидальной логистической функции, при этом приняты во внимание количество измерений параметров и характеристик (количество измеренных векторов) и однородность измеренных значений, а также результаты и качество работы по генерации характеристик процесса математическими моделями и нейронной сетью, являющихся составной частью цифрового двойника.
цифровые двойники в судоходстве, потенциал и перспективы, эксплуатационные процессы судна, процессный цифровой двойник, адекватность, методика оценки
Введение
В последнее десятилетие во многих сферах деятельности человека, в большинстве отраслей экономики не просто существует, а усиливается тенденция к автоматизации и роботизации производственных процессов. Можно сказать, что не только первая, но и вторая производная автоматизация и роботизация в настоящее время определяются значениями, большими нуля. Научно-технический прогресс способствовал рождению множества различных универсальных технологий. Последние позволили обосновать и реализовать такие технические и программные решения, которые еще 10–20 лет назад виделись чем-то фантастическим. Искусственный интеллект и машинное обучение, облачные технологии, аналитика больших данных, расширенная и виртуальная реальность кардинально поменяли и продолжают менять содержание многих видов деятельности человека.
Технология цифровых двойников
Одной из вышеобозначенных технологий является технология цифровых двойников (Digital Twins Technology, DTT) [1–4], под которыми в самом общем случае понимаются виртуальные представления реальных физических объектов, процессов или явлений, предельно точно описывающие их на протяжении всего жизненного цикла и находящиеся со «своим» объектом, процессом или явлением в постоянном взаимодействии. Результаты опроса [5], в котором участвовали 250 инженеров, проектировщиков, управленцев, демонстрируют несколько противоречивое отношение специалистов к DTT (рис. 1).
В действительности же технология цифровых двойников успешно используется многими крупными компаниями мира, но больше для проектирования и создания реальных объектов, чем для их эксплуатации. Вместе с тем потенциал цифровых двойников, в частности цифровых двойников судна и его эксплуатационных процессов, заслуживает большего внимания исследователей. Следует предположить, что такой инструмент прогнозирования, как цифровой двойник, может быть использован для моделирования и прогнозирования различных процессов, связанных с обеспечением навигационной безопасности судна. Так, например, можно формировать рекомендации по оптимизации маршрута и режима движения, прогнозировать траекторию судна при маневрировании при определенных управляющих воздействиях и, наоборот, определять управляющее воздействие (в частности, угол перекладки руля) для обеспечения безопасной траектории. Цифровой двойник скоростного проседания судна при плавании на мелководье даст возможность заранее оценивать фактическую глубину под килем. Кроме того, в 2024 г. специалистами Российского морского регистра судоходства была продекларирована возможность использования цифрового двойника для контроля состояния или управления физическим объектом при использовании технологий автономного судовождения [6]. Несколько ранее Регистром были утверждены и с 01.08.2020 вступили в силу «Положения по классификации морских автономных и дистанционно управляемых надводных судов (МАНС)». В указанном документе цифровые двойники не упоминаются напрямую. Однако очевидно, что они являются одним из эффективных инструментов создания и функционирования систем МАНС, требования к наличию которых на борту автономного судна Положениями установлены. В частности, технология цифровых двойников может быть использована при разработке системы ситуационной осведомленности и принятия решения по управлению, системы навигации и маневрирования и иных, регламентируемых Положениями Регистра, систем МАНС.
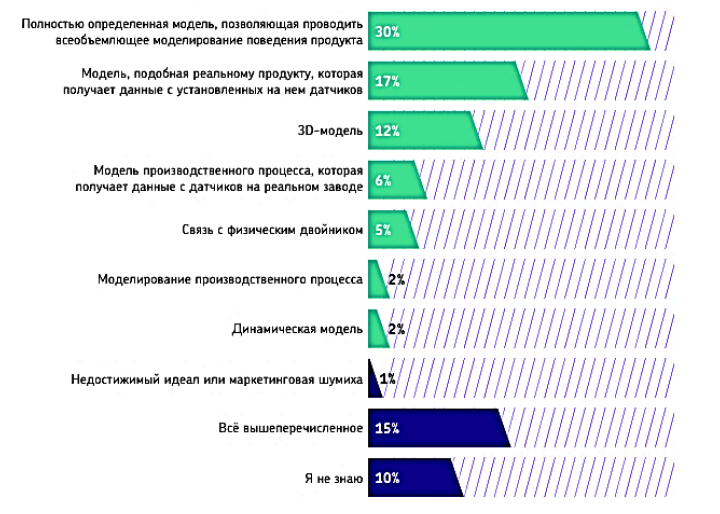
Рис. 1. Понимание концепции цифровых двойников (данные опроса [5])
Fig. 1. Understanding the concept of digital twins (survey data [5])
Цифровой двойник любого эксплуатационного процесса судна (эксплуатационный процессный двойник) прежде, чем его можно будет использовать, должен быть «собран» (записан), в первую очередь, по фактическим входным и соответствующим им выходным данным (параметрам и характеристикам), описывающим процесс. При этом множество сочетаний входных параметров должно включать в себя все возможные варианты, которые только могут встречаться при реализации процесса. Здесь очевидно, что эффективность и релевантность процессного цифрового двойника зависит от того, насколько полно и точно содержащиеся в нем совокупности значений параметров отражают совокупность возможных реализаций процесса. Вместе с тем большинство определений DT носят концептуальный характер и не содержат каких-либо измеримых характеристик, определяющих цифровой двойник. Определения термина, предложенные такими компаниями, как Siemens, General Electric, Dassault Systemes, Autodesk, CIMdata, Deloitte, включают необходимое требование по созданию точных (высокоточных, полноценных, адекватных) математических и численных моделей, но при этом зачастую не объясняется, что подразумевается под этим термином и с помощью каких подходов, методик, инструментов, решений и технологий достигается требуемая точность, полноценность и адекватность [7].
Таким образом, одной из существенных характеристик формируемого или уже используемого цифрового двойника будет являться некоторый показатель, оценивающий его полноту (адекватность), обоснованию методики определения которого и посвящена настоящая статья. При этом акцент в работе сделан на цифровых двойниках эксплуатационных процессов, связанных с навигацией и управлением судном (в частности, с маневрированием и скоростным проседанием).
Эксплуатационный процесс судна и его цифровой двойник
В общем случае под процессом необходимо понимать последовательную и необратимую смену состояний объекта (системы) во времени [8].
Количественно любая система описывается двумя классами величин, именуемыми параметрами и характеристиками. Параметры xi являются величинами, описывающими первичные свойства системы и условия ее функционирования, и одновременно исходными данными задачи анализа системы. В свою очередь характеристики yi, являясь функцией параметров и результатом решения задачи анализа, описывают уже вторичные свойства системы. Исходя из этого, состояние системы определяется совокупностью значений ее характеристик, зависящих от значений параметров и описывающих это состояние. Изменение хотя бы одной характеристики системы инициирует переход системы из одного состояния в другое, т. е. инициирует процесс (его начало или продолжение). Само изменение характеристики (характеристик) – как причина перехода системы из одного состояния в другое – называется событием [8].
Функционирование практически любой системы (в частности, судна) определяется совокупностью процессов, каждый из которых, по сути, является локальным, являющийся таковым, потому что либо он проходит в какой-либо подсистеме, либо с ним связано ограниченное число параметров и характеристик.
На рис. 2 представлена в общем виде структура локального процесса.
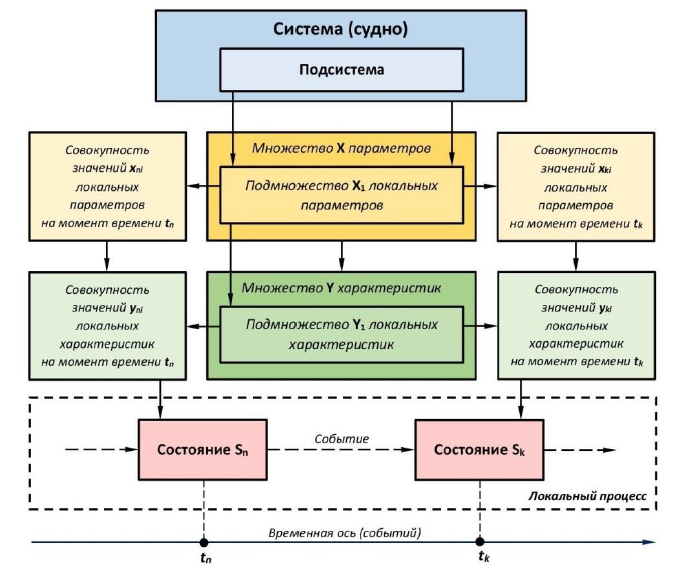
Рис. 2. Структура локального процесса
Fig. 2. Local process structure
В работе [9] представлена концепция цифрового двойника морского судна в период эксплуатации (эксплуатационного цифрового двойника судна). Схематически эта концепция изображена на рис. 3. Структурно концепция включает в себя внутренние и внешние значимые для цифрового двойника судна элементы из реального и виртуального пространства. Кроме самого судна реальное пространство содержит навигационное пространство, датчики S (сенсоры), другие суда V той же серии (того же проекта), суда T, которые осуществляют навигацию на той же акватории, что и наше судно, и могут считаться целями, как их понимают в задачах по расхождению судов [6].
Цифровой двойник судна включает в себя цифровые двойники компонентов DTC и процессов DTO. К первым (DTC) относятся виртуальные представления навигационного оборудования, судовой энергетической установки, механизмов, агрегатов и т. п. Множество DTO содержит цифровые двойники навигации, маневрирования (включая циркуляцию), швартовки, постановки на якорь, погрузки, выгрузки и т. д. В число цифровых двойников компонентов и процессов входит также ретроспективная информация, которая являлась основой цифрового двойника судна в периоды его проектирования, постройки и испытаний [9].
Внешними по отношению к цифровому двойнику судна элементами виртуального пространства являются информационное навигационное поле (цифровой двойник навигационного пространства DTNS), цифровые двойники судов V и T (DTV и DTT), а также операционный цифровой двойник (DTE), представляющий собой некоторую среду цифровых двойников, которая предназначена для выполнения различных (в первую очередь, вычислительных) операций [9].
Далее выделим из схемы, представленной на рис. 3, цифровой двойник процесса (процессный эксплуатационный цифровой двойник судна) и обоснуем его структуру и содержание (рис. 4).
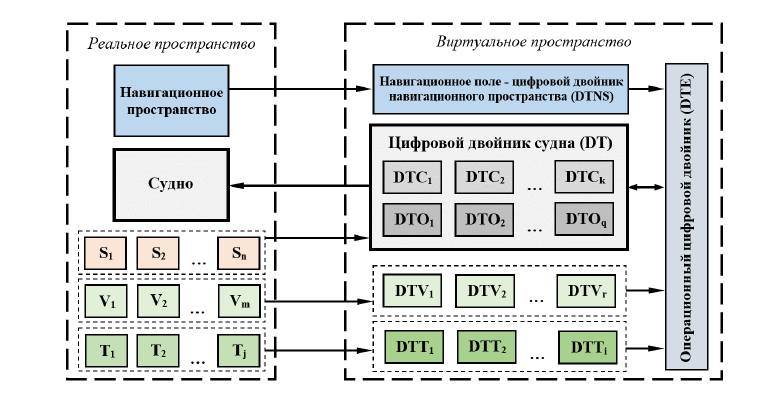
Рис. 3. Структура эксплуатационного цифрового двойника судна
Fig. 3. Structure of the operational digital twin of a vessel
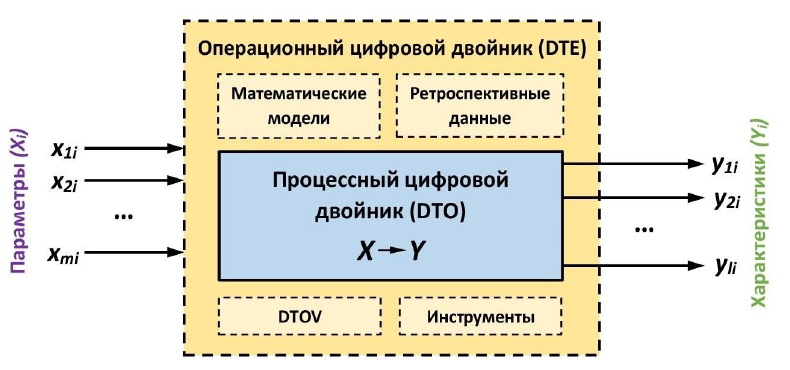
Рис. 4. Процессный эксплуатационный цифровой двойник судна
Fig. 4. Process-based operational digital twin of a vessel
Операционный цифровой двойник (DTE) является в таком представлении некоторой средой для процессного цифрового двойника (DTO). Входные для процессного двойника параметры первоначально «проходят» DTE.
Непосредственно цифровой двойник есть совокупность двух векторных (линейных) пространств X и Y, где пространство X представляет собой полную совокупность векторов параметров ![]() а пространство Y – также полную совокупность векторов характеристик
а пространство Y – также полную совокупность векторов характеристик![]() . При этом имеет место быть сюръективное отображение векторного пространства X на векторное пространство Y
. При этом имеет место быть сюръективное отображение векторного пространства X на векторное пространство Y ![]() , т. е. такое соответствие между двумя векторными пространствами, при котором каждому вектору пространства X поставлен в соответствие как минимум один вектор пространства Y (каждый вектор пространства Y является образом хотя бы одного вектора пространства X) [10, 11].
, т. е. такое соответствие между двумя векторными пространствами, при котором каждому вектору пространства X поставлен в соответствие как минимум один вектор пространства Y (каждый вектор пространства Y является образом хотя бы одного вектора пространства X) [10, 11].
Понятие адекватности процессного эксплуатационного двойника судна. Элементарная адекватность
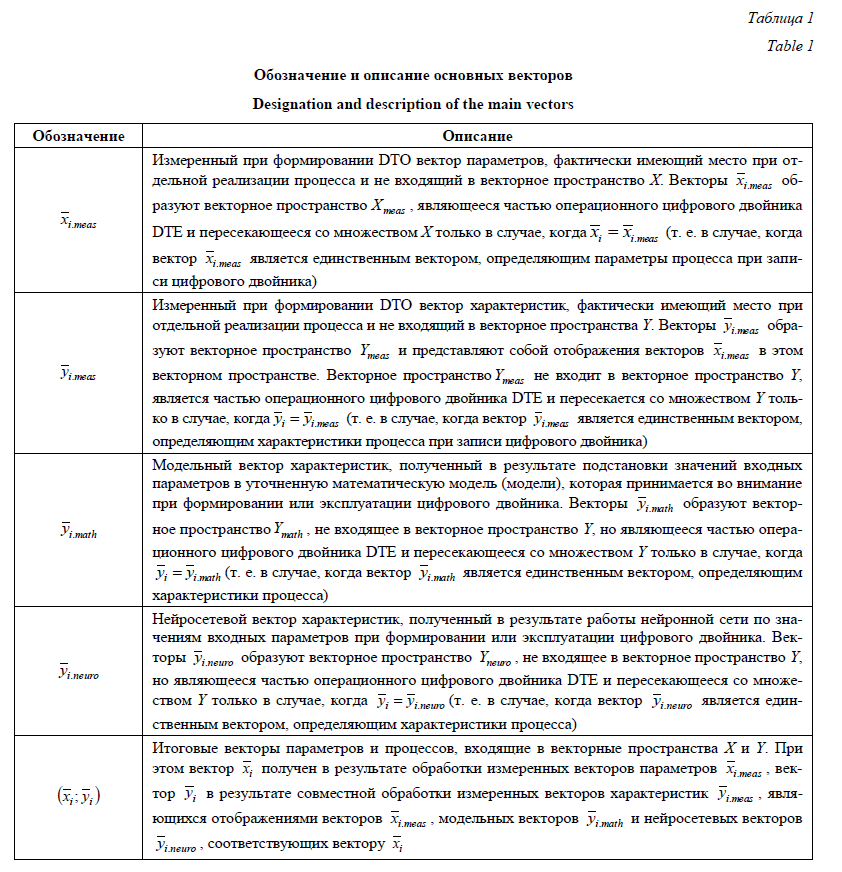
С целью внесения определенности в многообразие обозначений, используемых в настоящем исследовании для векторов, рациональным будет предварительно представить основные обозначения отдельной таблицей (табл. 1).
Понимая процессный цифровой двойник так, как это показано выше, первоначально определим, что именно необходимо считать адекватностью цифрового двойника.
Под адекватностью AdDTO (или А) процессного цифрового двойника следует понимать выраженное в процентах количество векторов, фактически составляющих векторное пространство X на текущий момент формирования или использования цифрового двойника, к числу всех возможных векторов этого пространства. Здесь очевидно, что в число последних входят безадресные векторы, т. е. векторы, полученные в результате физически неразумного сочетания значений параметров, для которых в векторном пространстве Y нет и не может быть отображения.
Для априорного исключения безадресных векторов с целью оценки адекватности DTO представим векторное пространство X следующим образом:
,
где XC – векторное пространство, полученное сочетанием всех существующих значений параметров; Xба – векторное пространство безадресных векторов.
Пространство безадресных векторов составят векторы, не прошедшие проверку по критерию совместимости значений (проверку на совместимость). Для обоснования критерия совместимости сделаем следующее допущение: если в любом подмножестве xn, содержащим n координат отдельно взятого вектора с m координатами, образующим множество xm, все элементы (значения) подмножества xn попарно совместимы и каждый из них совместим с некоторым элементом (значением) из подмножества  то последний элемент и векторы подмножества xn образуют подмножество совместимых значений
то последний элемент и векторы подмножества xn образуют подмножество совместимых значений ![]() . Так, например, если процесс имеет четыре входных параметра (вектор имеет четыре координаты), причем значения трех из них попарно совместимы, а каждое из них в отдельности совместимо со значением четвертого параметра, то все четыре значения (координаты вектора) являются совместимыми.
. Так, например, если процесс имеет четыре входных параметра (вектор имеет четыре координаты), причем значения трех из них попарно совместимы, а каждое из них в отдельности совместимо со значением четвертого параметра, то все четыре значения (координаты вектора) являются совместимыми.
Таким образом, проверку координат каждого вектора множества XC можно осуществить по критерию (критериям) попарной совместимости значений (табл. 2) сравнением наблюдаемого и критического значений критерия.
Таблица 2
Table 2
Критерии попарной совместимости значений параметров (критические значения)
Criteria for pairwise compatibility of parameter values (critical values)
|
Значения параметра |
x1 |
x2 |
x3 |
… |
xn |
|
x1 |
– |
kпс.12 |
kпс.13 |
… |
kпс.1n |
|
x2 |
kпс.12 |
– |
kпс.23 |
… |
kпс.2n |
|
x3 |
kпс.13 |
kпс.23 |
– |
… |
kпс.3n |
|
… |
… |
… |
… |
– |
… |
|
xn |
kпс.1n |
kпс.2n |
kпс.3n |
… |
– |
В случае, если хоть для какой-нибудь пары значений имеет место kпс.набл > kпс.крит, то такие значения считаются несовместимыми, а вектор, координаты которого определяют среди прочих эти значения, признается безадресным.
Естественно, содержание критериев, представленных в табл. 2 в общем виде, зависит от содержания параметров и подлежит дальнейшему обоснованию. В любом случае при обосновании должны и будут приниматься во внимание опыт эксплуатации объекта (судна), ретроспективные результаты наблюдений и др. Так, например, если параметрами процесса являются среди прочего волнение и сила ветра, а их значения определяются в баллах по соответствующим шкалам, то критерием совместимости будет являться разница значений параметров. Следует также заметить, что пока единственным методом обоснования видится метод экспертной оценки.
Следует различать формальную полноту DTO (fAdDTO, или AF) и парциальную или средневзвешенную полноту DTO (pAdDTO, или AP). По сути, выше дано определение именно для формальной адекватности, где все векторы считаются одинаково ценными (адекватными) для цифрового двойника.
В наименовании парциальной полноты смысл и причина использования прилагательного несколько отличны от общепринятых, но также восходят к латинским корням. Pars – часть, partialis – частичный, и при оценке адекватности цифрового двойника принимается во внимание вес каждого вектора пространства X и соответствующего ему отображения в векторном пространстве Y.
При определении веса вектора пространства X имеет значение источник его формирования, и здесь возможны несколько вариантов:
– координаты вектора из пространства X и соответствующего ему вектора отображения в пространстве Y получены непосредственным измерением параметров и характеристик;
– координаты вектора пространства Y получены по значениям параметров процесса с использованием уточненной математической модели (моделей);
– координаты вектора пространства Y сгенерированы нейросетью;
– для получения координат пары векторов использована информация DTA, т. е. аналогичного процессного цифрового двойника другого, но однотипного судна.
При этом оптимальным здесь видится комплексирование информации по первым трем источникам.
Здесь введем еще одно понятие – элементарная (единичная) адекватность (UnAdDTO, или AU), которая по сути является весом отдельно взятого вектора. При этом примем, что максимально возможные значения элементарной адекватности (веса векторов) различаются и определяются следующим образом вероятностью появления вектора параметров на входе цифрового двойника при отдельно взятой реализации процесса.
В первую очередь для каждого из параметров необходимо получить интервальный закон распределения, разбив всю область возможных значений параметра на несколько интервалов. Следует предположить, что число nrange таких интервалов в целях оценки парциальной полноты цифрового двойника не должно быть большим – достаточно ограничиться 3–5 интервалами (nrange = 3 ÷ 5). Тогда само векторное пространство X можно будет разбить на подпространства XX, содержащие векторы, каждая координата которых принадлежит отдельно взятому интервалу. В таком случае количество векторных подпространств XX в векторном пространстве X будет определяться формулой
где nrange.i – количество интервалов разбиения i-го из n параметров, а вероятность того, что вход цифрового двойника процесса будет определяться конкретным вектором , можно вычислить по формуле
, можно вычислить по формуле

где p(xi) – вероятность того, что i-й входной параметр будет иметь значение ![]() .
.
Формула (1) одновременно определяет максимальное значение элементарной адекватности AUmax i, а сумма этих максимумов – максимум парциальной адекватности цифрового двойника:
где ![]() – количество векторов в i-м подпространстве XXi.
– количество векторов в i-м подпространстве XXi.
Здесь следует заметить, что для первичного построения закона распределения параметров можно воспользоваться исключительно ретроспективной информацией, полученной в результате длительных наблюдений, регистрации параметров посредством Voyage Data Recorder (VDR, прибор регистрации данных) и др. С началом формирования цифрового двойника законы распределения могут корректироваться за счет потока текущих (актуальных) данных. Также из формулы (1) очевидно принятое допущение о независимости параметров. Кроме того, при таком подходе безадресные векторы пространства XC в случае пренебрежения ранее описанным алгоритмом их исключения образовали бы подпространства с AUmax = 0.
Формулы элементарной адекватности и парциальной адекватности
Исходя из сказанного выше, можно сделать вывод о том, что текущее значение элементарной адекватности (веса) вектора AUтек будет детерминировано точностью записанных при формировании DTO векторов, точностью векторов, полученных при помощи уточненных математических моделей и точностью прогнозов нейросети. С одной стороны, в предположении потенциально равного вклада указанных источников в элементарную адекватность при достижении последней своего максимального значения максимум веса информации отдельно взятого источника можно записать как AUmax / 3. Тогда значение текущей элементарной адекватности (текущего веса) будет определяться суммой весов каждого источника информации. Однако очевидно, что при определенных условиях для функционирования цифрового двойника вполне может быть достаточно и одного источника, который в итоге и будет обеспечивать максимум элементарной адекватности.
Первично рассмотрим случай, когда произвольная пара векторов ![]() была получена исключительно при помощи измерений значений параметров и характеристик, и будем считать, что элементарная адекватность такого вектора зависит от количества измерений (количества измеренных векторов). Кроме того, предположим, что на первом этапе «поступления» векторов элементарная адекватность будет изменяться (увеличиваться) медленно, затем соответствующий градиент резко возрастает, и при достижении AUтек.i больших, близких к APmax i, значений происходит насыщение. Иными словами, первая производная функции AUтек.i (n) имеет колоколообразную форму. Этому условию удовлетворяет сигмовидная логистическая функция вида [12]:
была получена исключительно при помощи измерений значений параметров и характеристик, и будем считать, что элементарная адекватность такого вектора зависит от количества измерений (количества измеренных векторов). Кроме того, предположим, что на первом этапе «поступления» векторов элементарная адекватность будет изменяться (увеличиваться) медленно, затем соответствующий градиент резко возрастает, и при достижении AUтек.i больших, близких к APmax i, значений происходит насыщение. Иными словами, первая производная функции AUтек.i (n) имеет колоколообразную форму. Этому условию удовлетворяет сигмовидная логистическая функция вида [12]:

где L – наибольшее (предельное) значение функции; k – крутизна кривой; x0 – абсцисса середины функции.
Здесь следует заметить, что несмотря на название функции, прямого отношения к управленческому термину «логистика» она не имеет. Наибольшее же распространение логистическая функция получила в нейронных сетях как функция активации.
Использование в чистом виде количества векторов ![]() , каждый из которых получен при одних и тех же входных параметрах, в качестве аргумента функции (2) здесь видится нецелесообразным, особенно в свете того, что эти векторы могут отличаться значениями характеристик (координатами).
, каждый из которых получен при одних и тех же входных параметрах, в качестве аргумента функции (2) здесь видится нецелесообразным, особенно в свете того, что эти векторы могут отличаться значениями характеристик (координатами).
Каждый эксплуатационный процесс на морском судне, связанный с навигацией и управлением судном, настолько уникален, что нет никаких причин и оснований ожидать частого повторения одинаковых (или близких) начальных условий процесса (а значит, одинаковых значений параметров). Исходя из этого, будем считать, что двух пар измеренных векторов ![]() будет вполне достаточно для обеспечения 50-процентной единичной полноты. Однако равенство
будет вполне достаточно для обеспечения 50-процентной единичной полноты. Однако равенство  (или в общем случае
(или в общем случае  ) еще не означает равенства
) еще не означает равенства  – значения одного и того же параметра в различных векторах
– значения одного и того же параметра в различных векторах ![]() могут отличаться. Такая неоднородность значений одной и той же характеристики, очевидно, имеет определяющий характер при вычислении текущей элементарной адекватности AUтек.i – чем больше неоднородность, тем больше S-образная логистическая кривая будет смещаться вправо. Для оценки же однородности значений характеристик в совокупности векторов
могут отличаться. Такая неоднородность значений одной и той же характеристики, очевидно, имеет определяющий характер при вычислении текущей элементарной адекватности AUтек.i – чем больше неоднородность, тем больше S-образная логистическая кривая будет смещаться вправо. Для оценки же однородности значений характеристик в совокупности векторов ![]() используем частоту vk появления наиболее повторяемого значения каждой характеристики. Тогда однородность отдельно взятого вектора характеристик
используем частоту vk появления наиболее повторяемого значения каждой характеристики. Тогда однородность отдельно взятого вектора характеристик![]() , состоящего из m координат (значений) будет оцениваться произведением частот vik всех характеристик:
, состоящего из m координат (значений) будет оцениваться произведением частот vik всех характеристик:
Так, например, при одних и тех же значениях входных параметров, наблюдавшихся трижды, были получены три вектора характеристик
Тогда ![]() , а однородность вектора будет равна vi = 0,449. Здесь необходимо указать, что одинаковыми (повторяющимися) значениями следует считать и те значения характеристик, которые, по сути, различаются, но либо попадают в заранее установленный один и тот же интервал, либо отличие не превышает также заранее установленного значения.
, а однородность вектора будет равна vi = 0,449. Здесь необходимо указать, что одинаковыми (повторяющимися) значениями следует считать и те значения характеристик, которые, по сути, различаются, но либо попадают в заранее установленный один и тот же интервал, либо отличие не превышает также заранее установленного значения.
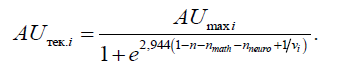
Основываясь на сказанном и формуле (2) для текущего значения элементарной адекватности можно записать:
Для определения крутизны k сигмоиды условимся, что один измеренный вектор обеспечивает единичную полноту, равную 5 %, при этом vi = 1, т. е.:
откуда k = –ln19 = –2,944, а формула (3) примет вид:
На рис. 5 представлены три S-кривые: для vi = 1, vi = 0,8 и vi = 0,4.
При самом упрощенном подходе результаты работы математической модели (моделей) и нейросети, а именно вырабатываемые ими векторы характеристик ![]() , можно было бы рассмотреть как дополнительные векторы к принятым во внимание в формуле (4). Однако как уточненные математические модели, так и нейросети обладают некоторой точностью прогноза, а векторы
, можно было бы рассмотреть как дополнительные векторы к принятым во внимание в формуле (4). Однако как уточненные математические модели, так и нейросети обладают некоторой точностью прогноза, а векторы ![]() своими весами, которые только в частном случае могут совпадать с весами измеренных векторов
своими весами, которые только в частном случае могут совпадать с весами измеренных векторов ![]() и приниматься в расчетах во внимание одинаково с ними. Вместе с тем для учета матмодели и нейросети при определении элементарной адекватности итогового вектора будет использован не вес как таковой, а некоторый векторный эквивалент. Под последним подразумевается количества векторов nmath и nneuro, которые можно добавить к измеренным векторам в формуле (4) и которые определяются формулами
и приниматься в расчетах во внимание одинаково с ними. Вместе с тем для учета матмодели и нейросети при определении элементарной адекватности итогового вектора будет использован не вес как таковой, а некоторый векторный эквивалент. Под последним подразумевается количества векторов nmath и nneuro, которые можно добавить к измеренным векторам в формуле (4) и которые определяются формулами
где Sмм – количество векторов пространства Y, по которым было проведено уточнение математической модели (оптимально – все векторы пространства); ![]() – удельное количество векторов пространства Y, по которым было проведено уточнение математической модели, эквивалентное одному измеренному вектору; Sнс – количество векторов пространства Y, по которым было проведено обучение нейронной сети;
– удельное количество векторов пространства Y, по которым было проведено уточнение математической модели, эквивалентное одному измеренному вектору; Sнс – количество векторов пространства Y, по которым было проведено обучение нейронной сети; ![]() – удельное количество векторов пространства Y, по которым была проведена оценка точности нейросети, эквивалентное одному измеренному вектору; vмм – комплексная оценка сравнения результатов работы математической модели (модельного вектора) и векторов пространства Y – определяется аналогично однородности vi; vнс – комплексная оценка сравнения результатов работы нейросети (нейросетевого вектора) и векторов пространства Y, не участвовавших в обучении нейросети – определяется аналогично однородности vi.
– удельное количество векторов пространства Y, по которым была проведена оценка точности нейросети, эквивалентное одному измеренному вектору; vмм – комплексная оценка сравнения результатов работы математической модели (модельного вектора) и векторов пространства Y – определяется аналогично однородности vi; vнс – комплексная оценка сравнения результатов работы нейросети (нейросетевого вектора) и векторов пространства Y, не участвовавших в обучении нейросети – определяется аналогично однородности vi.
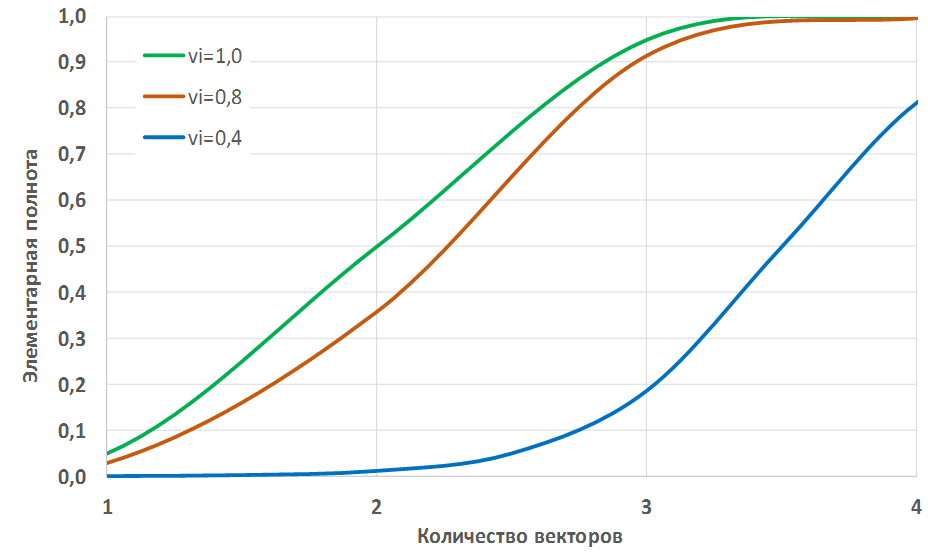
Рис. 5. Графическое изображение сигмоиды (S-кривой) для различных случаев
Fig. 5. Graphical representation of the sigmoid (S-curve) for various cases
Для определения величин  оптимальным вновь видится метод экспертного оценивания, при котором эксперты будут принимать во внимание особенности процесса, скорость насыщения цифрового двойника измеренными векторами и другие факторы.
оптимальным вновь видится метод экспертного оценивания, при котором эксперты будут принимать во внимание особенности процесса, скорость насыщения цифрового двойника измеренными векторами и другие факторы.
В результате, учитывая предвычисления векторов математической моделью (моделями) и нейросети, т. е. модельный и нейросетевой векторы, и формулу (4), имеем:
В целях настоящего исследования, объектами которого являются такие эксплуатационные процессы судна, как маневрирование и скоростное проседание, принято 
В итоге адекватность цифрового двойника APтек можно оценить следующим образом:

Масштабируя (5) по единице, получим резолютивную формулу для парциальной адекватности цифрового двойника:

Без обоснования критерия достаточности цифрового двойника содержательность, релевантность, полезность и применимость как самого понятия «адекватность», так и формулы (6) будут неполными и ограниченными. Однако установить критерий достаточности, т. е. некоторое значение (или значения) парциальной адекватности, при котором процессный цифровой двойник можно использовать в тех целях, для которых он создавался, – задача, решение которой затруднительно и может иметь исключительно интуитивный, эвристический и/или формальный характер. Так, например, цифровой двойник с APтек ≤ 0,33 можно считать зарождающимся и неприменимым в целях навигации судна. В случае, если 0,33 < APтек ≤0,67, то цифровой двойник возможно позиционировать как ненадежный и применять его с осторожностью. В свою очередь, цифровой двойник с APтек > 0,67 будет уже, наоборот, надежным, полноценным и полностью применимым. Естественно, что при надлежащем обосновании указанные критерии (границы) могут быть изменены. Здесь следует заметить, что небольшое значение адекватности, относящее цифровой двойник к числу зарождающихся, не означает, что такой DTO при некоторых входных параметрах не выдаст вектор характеристик. Проблема здесь заключается в том, насколько точно выданные характеристики будут отражать реальные.
Заключение
При всем многообразии дефиниций понятия «цифровой двойник» и направлений развития соответствующих концепции и технологии широкое внедрение DTT на морском флоте, в частности на морских судах в целях обеспечения их навигационной безопасности, видится достаточно перспективным, особенно в интеграции с другими инновационными и прогрессивными технологиями. Кроме как для решения известных задач эксплуатации современного морского флота и классических (пилотируемых человеком) судов, создания узкоспециализированных систем поддержки принятия решения, цифровые двойники могут быть эффективным инструментом обеспечения полноценного функционирования МАНС. Гипотетически даже можно предположить, что со временем технология цифровых двойников достигнет такого своего уровня развития, при котором цифровой двойник судна будет формироваться не в условиях его эксплуатации, а на стадии проектирования и строительства, и одновременно с готовностью МАНС как физического объекта будет полностью сформирована его полноценная виртуальная интерпретация.
При условии соблюдения общих принципов концепции развитие цифровых двойников в судоходной отрасли и методология их формирования и использования для навигации и управления судов будут иметь свой путь. Это обусловлено, в первую очередь, спецификой сопутствующих проблем. Так, например, обработка и хранение большого объема данных, являющихся сущностным признаком DTT, может быть обеспечена только на облачных ресурсах, требующих наличия на судне широкополосного высокоскоростного доступа в глобальную сеть. Кроме того, эксплуатационные процессы, связанные с обеспечением навигационной безопасности плавания судна, обладают таким комплексом особенностей и уникальностью реализаций, которые не позволяют скопировать в чистом виде методики формирования цифрового двойника, уже реализованные в других отраслях.
Интенсивные комплексные межотраслевые и прикладные исследования постепенно приводят и приведут к решению большинства проблем, препятствующих активному проникновению технологии цифровых двойников в морскую отрасль и на морские суда. К числу таких исследований относится и настоящая работа, в результате которой обоснована методика оценки адекватности эксплуатационного процессного двойника морского судна как часть формирующейся теоретико-методологической основы создания и эксплуатации такого двойника.
1. Нафиков А. М., Стучилин В. В. Особенности моделирования цифрового двойника для умного производства // Автоматизация. Соврем. технологии. 2026. Т. 80. № 1. С. 29–34. DOIhttps://doi.org/10.36652/0869-4931-2026-80-1-29-34.
2. Рудской А. И. Цифровая промышленность на основе цифровых двойников // Приборы. 2021. № 3 (249). С. 9–16.
3. Бахтадзе Н. Н., Коньков А. Е., Елпашев Д. В., Кушнарев В. Н., Мухтаров К. С., Пуртов А. В., Пятецкий В. Е., Черешко А. А. Методы синтеза цифровых двойников на основе цифровых идентификационных моделей производственных процессов // Информ. технологии и вычисл. системы. 2024. № 4. С. 100–111. DOIhttps://doi.org/10.14357/20718632240410.
4. Султан Н., Петров В. Е. Литературный обзор: применение автоматизированных цифровых производственных систем на основе цифровых двойников // Соврем. наука: актуал. проблемы теории и практики. Сер.: Естественные и технические науки. 2024. № 7-2. С. 168–172. DOIhttps://doi.org/10.37882/2223-2966.2024.7-2.32.
5. Боровков А. И., Рябов Ю. А., Щербина Л. А., Гамзикова А. А. Цифровые двойники: вопросы терминологии. СПб.: Политех-пресс, 2021. 28 с.
6. РС: Цифровые двойники судов могут применяться для проверки и подтверждения принятых технических решений. URL: https://portnews.ru/news/364426/ (дата обращения: 08.11.2025).
7. Боровков А. И., Гамзикова А. А., Кукушкин К. В., Рябов Ю. А. Цифровые двойники в высокотехнологичной промышленности: крат. докл. (сентябрь 2019 г.). СПб.: Изд-во СПбПУ Петра Великого, 2019. 62 с.
8. Алиев Т. И. Основы моделирования дискретных систем. СПб.: Изд-во СПбГУ ИТМО, 2009. 363 с.
9. Ермаков С. В., Мулина Е. В., Малинин Н. Ж. Цифровой двойник судна в период эксплуатации и оценка возможности его использования в целях построения и реализации траектории морских автономных надводных судов // Вестн. Астрахан. гос. техн. ун-та. Сер.: Морская техника и технология. 2025. № 2. С. 48–58. DOIhttps://doi.org/10.24143/2073-1574-2025-2-48-58.
10. Ершов Ю. Л., Палютин Е. А. Математическая логика. СПб.: Лань, 2004. 336 с.
11. Верещагин Н. К., Шень А. Лекции по математической логике и теории алгоритмов. Ч. 1. Начала теории множеств. М.: Изд-во МЦНМО, 2002. 128 с.
12. Han Jun, Morag Claudio. The influence of the sigmoid function parameters on the speed of backpropagation learning // From Natural to Artificial Neural Computation. Lecture Notes in Computer Science. 1995. V. 930. P. 195–201. DOIhttps://doi.org/10.1007/3-540-59497-3_175.
