










Россия
Статья посвящена разработке и обоснованию метода анализа данных мониторинга, ориентированного на формирование управляющих воздействий в составе киберфизических систем, обусловленное необходи-мостью повышения эффективности автоматизированных систем управления за счет внедрения интеллектуальных методов обработки информации, которые обеспечивают адаптацию к изменяющимся условиям открытой внешней среды. Предлагаемый метод базируется на последовательном выполнении трех этапов: нормализации поступающих данных, прогнозировании параметров системы с использованием архитектуры рекуррентной нейронной сети LSTM и адаптации управляющих воздействий с помощью градиентного метода. В качестве примера применения разработанного метода рассмотрена система мониторинга параметров водной среды в рыбном хозяйстве, где осуществлялся сбор показателей температуры воды, уровня pH и содержания растворенного кислорода. Полученные экспериментальные данные позволили провести обучение модели и реализовать механизм автоматической корректировки управляющих параметров в режиме, приближенном к реальному времени. Оценка качества прогнозирования осуществлялась с использованием метрик MAE и MAPE, значения которых составили менее 0,2 %, что указывает на высокую точность модели. Разработка включает также модуль эмпири-ческих правил управления, реализующих логическую интерпретацию возможных отклонений и формирование соответствующих управляющих сигналов. Проведенные натурные испытания на предприятиях прудового хозяйства подтвердили эффективность предложенного подхода: зафиксировано повышение точности управления до 86 %, снижение потребления ресурсов на 9 % и сокращение времени, затрачиваемого на мониторинг, до 95 %. Разработанный метод может быть масштабирован и адаптирован для использования в других областях: промышленной автоматизации, экологическом мониторинге, интеллектуальных транспортных системах, а также в инфраструктуре «умных» городов, что подтверждает его универсальность и научную новизну.
нормализация данных, прогнозирование показателей, рекуррентная нейросеть LSTM, мониторинг, управление, киберфизические системы
Введение
В контексте развития киберфизических систем актуальной задачей становится автоматический мониторинг параметров открытой внешней среды и управление техническими процессами на основе полученной информации. Под открытой внешней средой понимается совокупность факторов, находящихся вне пределов непосредственно управляемой технической системы и обладающих свойством динамичности, неопределенности и нестационарности. К таким факторам относятся изменения окружающей среды, помехи, ошибки измерений и иные воздействия, которые способны повлиять на работоспособность киберфизических систем. Ключевым аспектом эффективного управления является разработка аналитических методов, которые позволяют не только обрабатывать данные мониторинга, но и формировать адаптивный контроль. В данной статье предлагается метод анализа данных мониторинга, который сочетает в себе нормализацию, прогнозирование с использованием рекуррентной нейронной сети (LSTM) и адаптивные алгоритмы управления.
Обзор методов управления на основе анализа данных мониторинга
Современные системы управления активно применяют методы анализа данных мониторинга для формирования управляющих воздействий. В результате анализа публикаций, посвященных этой теме, было выявлено, что ключевой тенденцией является переход от традиционного мониторинга к прогнозной аналитике. Данный подход позволяет адаптировать управленческие решения в различных областях – от промышленности до экономики.
В работе [1] В. В. Семенов рассматривает применение анализа временных рядов и ансамблевых моделей машинного обучения для повышения точности идентификации состояний систем. За счет предсказания возможных аномалий и адаптации системы управления к динамическим условиям достигается оптимизация управляющих воздействий.
В работе [2] Д. А. Волков демонстрирует, как автоматизация анализа данных способствует оптимальному управлению экономическими рисками. Использование цифровых платформ позволяет адаптировать стратегию предприятия к рыночным изменениям в режиме реального времени.
В статье [3] Д. Кононов и Е. Чибисова доказывают, что цифровые системы управления, основанные на анализе данных, позволяют оперативно реагировать на изменения внутренних и внешних факторов. Внедрение таких методов приводит к оптимизации процессов принятия решений и снижению затрат.
В исследовании [4] L. Sun и соавторы предлагают использовать методы машинного обучения и управления на основе данных для мониторинга, оптимизации и диагностики энергосистем, что позволяет оперативно реагировать на неопределенности, в результате чего повышается устойчивость, безопасность и эффективность управления.
Rath K. C в работе [5] рассматривает роль интернета вещей (IoT) в контексте Индустрии 4.0, предлагая его интеграцию с технологиями больших данных, искусственного интеллекта и робототехники для создания интеллектуальных фабрик и подключенных цепочек поставок. IoT позволяет собирать данные в реальном времени, оптимизировать производственные процессы, прогнозировать обслуживание и снижать издержки, что способствует росту эффективности и гибкости управления производством.
Современные подходы к моделированию сложных динамических систем в статье [6] рассматривают A. Ghadami и B. I. Epureanu, предлагая интеграцию методов машинного обучения и теории динамических систем для преодоления проблем высокой размерности и хаотичности. Они подчеркивают потенциал data-driven и AI-ориентированных методов в улучшении прогнозирования и анализа, а также необходимость дальнейших разработок для расширения их применимости в науке и инженерии.
В своей работе [7] M. Ammar рассматривает решения на базе программных платформ, интерактивных инструкций, электронных журналов, продвинутого SPC и аналитики данных, а также интеграцию умных материалов с IoT для повышения точности, выявления ошибок и повышения эффективности контроля качества в производстве.
Таким образом, можно сделать вывод, что адаптация управления на основе анализа данных мониторинга является одним из важнейших направлений в современных исследованиях. Ключевая перспектива дальнейших исследований заключается в развитии методов адаптивного управления, основанных на интеллектуальном анализе данных мониторинга, что позволит создавать гибкие самонастраивающиеся системы управления в различных областях – от промышленности до социальной сферы.
Метод анализа данных мониторинга для формирования управляющих воздействий
Предлагаемый метод базируется на анализе данных, поступающих от сенсорных систем, и включает в себя следующие основные этапы (рис. 1); мониторинг параметров системы (рис. 2): включает сбор данных с датчиков, их передачу на сервер и сохранение в базе данных.
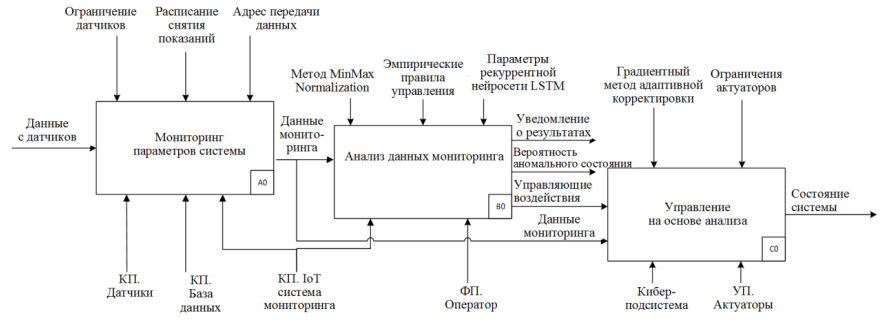
Рис. 1. Структурно-функциональная модель процесса управления киберфизической системой:
КП – кибер-подсистема; ФП – физическая подсистема; УП – управляющая подсистема
Fig. 1. Structural and functional model of the cyberphysical system management process:
КП – cyber subsystem; ФП – physical subsystem; УП – control subsystem

Рис. 2. Мониторинг параметров системы
Fig. 2. Monitoring of system parameters
Анализ данных мониторинга (рис. 3): нормализация данных, применение архитектуры LSTM для предсказания будущих состояний системы на основе временных рядов, обратная нормализация, уведомление оператора, а также формирование управляющих воздействий.
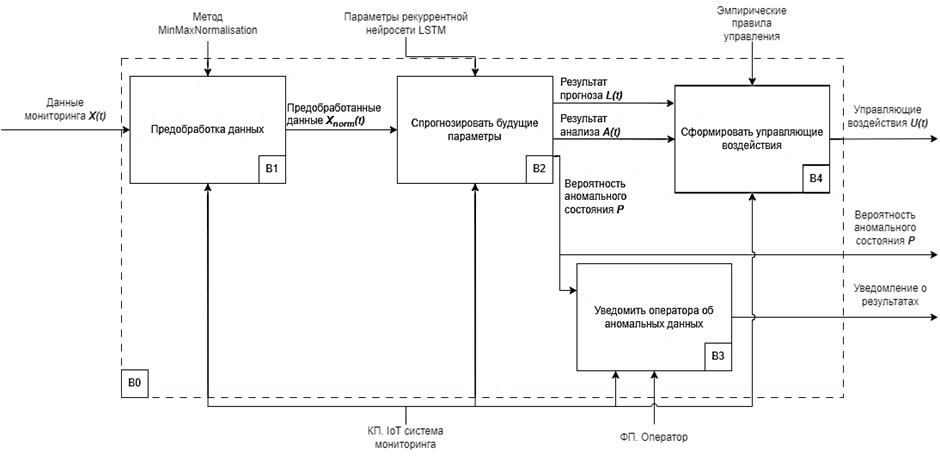
Рис. 3. Метод анализа данных мониторинга для формирования управляющих воздействий
Fig. 3. Method of monitoring data analysis for the formation of control actions
Управление на основе анализа: исполнение управляющих команд, оценка точности управления и адаптация управления.
Мониторинг в киберфизических системах – это процесс непрерывного наблюдения за состоянием системы с использованием датчиков, сенсоров и других устройств, которые собирают данные о физических и вычислительных процессах. Эти данные передаются в системы анализа для принятия решений
в реальном времени. Мониторинг позволяет:
– отслеживать текущее состояние системы;
– выявлять отклонения от нормальной работы;
– прогнозировать возможные сбои и аварии;
– адаптировать производительность системы.
Для расчета вероятности аномальных состояний данной модели используется формула
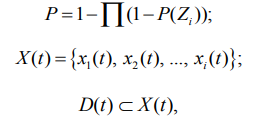
где P – вероятность аномального состояния; Zi – Z-оценка i-го параметра; X(t) – множество входных данных, содержащее показания всех датчиков в мо-
мент времени t; D(t) – множество данных из базы в момент времени t.
Z-оценка содержит в себе вектор входных данных и рассчитывается по формуле
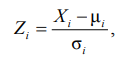
где μi – среднее значение параметра; σi – стандартное отклонение данных в этих же единицах.
Для анализа данных мониторинга необходимо
в первую очередь привести их к унифицированному виду, используя метод MinMax Normalisation [8], определяемый следующим выражением:
где Xnorm(t) – множество нормализованных с помощью метода MinMax Normalisation данных; Xmin, Xmax – минимальное и максимальное значение в данных.
Результат работы нормализации на примере входных данных представлен в табл. 1.
Таблица 1
Table 1
Входные данные и их нормализованные значения за 10 дней
Input data and their normalized values for 10 days
|
День |
Температура |
Температура |
pH X2 |
pH Xnorm,2 |
Кислород |
Кислород Xnorm,3 |
|
1 |
22,1 |
0,29 |
6,9 |
0,33 |
8,1 |
0,64 |
|
2 |
23,4 |
0,53 |
7,0 |
0,67 |
7,9 |
0,45 |
|
3 |
24,0 |
0,64 |
8,2 |
0,73 |
||
|
4 |
21,8 |
0,24 |
7,1 |
1,00 |
8,4 |
0,91 |
|
5 |
20,5 |
0,00 |
7,0 |
0,67 |
8,3 |
0,82 |
|
6 |
25,2 |
0,85 |
7,5 |
0,09 |
||
|
7 |
26,0 |
1,00 |
6,9 |
0,33 |
7,4 |
0,00 |
|
8 |
22,5 |
0,36 |
6,8 |
0,00 |
8,0 |
0,55 |
|
9 |
21,3 |
0,15 |
8,5 |
1,00 |
||
|
10 |
24,8 |
0,78 |
7,0 |
0,67 |
7,8 |
0,36 |
Нормализованные данные поступают на вход модели LSTM (рис. 4), работа которой описывается следующими уравнениями [9]:

где входной шлюз it определяет, какую новую информацию добавить; забывающий шлюз ft определяет, какие старые данные удалить; выходной шлюз ot формирует выходной сигнал; ht–1 – скрытое состояние из прошлого шага; Ct – состояние ячейки памяти; W – обучаемые веса; σ – сигмоида, которая дает значения от 0 до 1; xt – вход в момент времени t; b – смещение; ![]() – состояние новой ячейки памяти.
– состояние новой ячейки памяти.

Рис. 4. LSTM-модель прогнозирования параметров [10]: А – LSTM-ячейка
Fig. 4. LSTM model of parameter prediction [10]: А – LSTM cell
Рассмотрим данную модель на примере управления рыбным хозяйством.
Система получает данные о состоянии водоема от датчиков:
– температура воды X1, °C, допустимый диапазон 20 °C ≤ X1 ≤ 28 °C;
– pH воды X2, допустимый диапазон 6,5 ≤ X2 ≤ 8,5;
– растворенный кислород X3, мг/л, допустимый диапазон 6,0 ≤ X3 ≤ 8,5.
В качестве исходных данных используются 100 значений временного ряда. Далее данные делятся в пропорции:
– 75 % (75 точек) – обучающая выборка;
– 25 % (25 точек) – тестовая выборка.
Разделение выполняется таким образом, чтобы обучающая выборка содержала достаточное количество примеров для корректного выявления временных зависимостей.
Модель состоит из следующих слоев (рис. 5):
– входной слой принимает 3 входных параметра (температура, pH, кислород);
– два LSTM-слоя, которые позволяют выявлять сложные временные зависимости;
– полносвязный слой преобразует выход LSTM в 3 прогнозируемых параметра;
– регрессионный слой используется для предсказания числовых значений.

Рис. 5. Архитектура модели прогнозирования параметров воды
Fig. 5. Architecture of the water parameter prediction model
Модель использует 100 нейронов в первом LSTM-слое и 50 нейронов во втором, что повышает способность сети к обобщению данных.
Модель обучается с использованием оптимизатора Adam, который является улучшенным градиентным спуском [11], и следующими параметрами:
– количество эпох: 500;
– мини-пакет: 10;
– начальная скорость обучения: 0,001;
– снижение скорости обучения каждые 100 эпох (в 2 раза);
– порог градиента: 1 (ограничение градиента для предотвращения резких скачков).
Эти параметры позволяют сбалансировать скорость и точность обучения, предотвращая переобучение. Результат работы прогноза представлен на рис. 6.
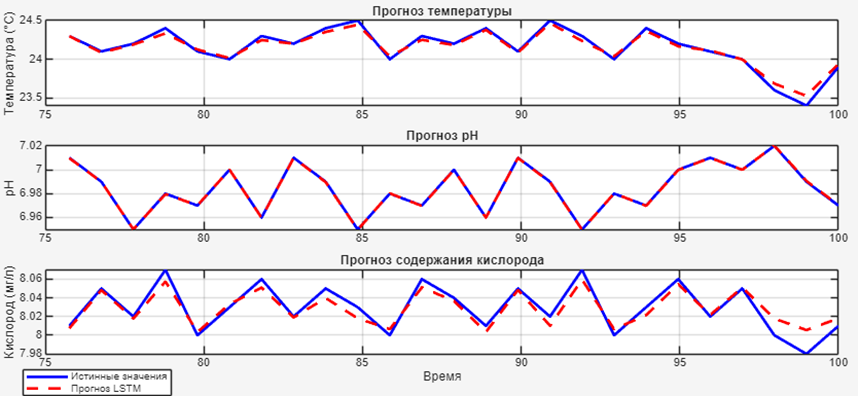
Рис. 6. Истинные значения параметров и результат прогноза LSTM
Fig. 6. The true values of the parameters and the result of the LSTM forecast
Модель получает нормализованные данные в виде последовательностей временных рядов. Сеть обучается минимизировать среднеквадратичную ошибку (MSE) между прогнозами и реальными значениями. По завершении обучения модель сохраняет веса, необходимые для предсказания новых значений.
Для оценки качества работы предложенной модели используются метрики MAE (Mean Absolute Error) и MAPE (Mean Absolute Percentage Error) [12]:
– MAE – средняя абсолютная ошибка. Эта метрика показывает среднюю величину ошибки предсказания без учета направления отклонения. Низкие значения MAE свидетельствуют о высокой точности модели;
– MAPE – средняя относительная процентная ошибка. MAPE выражает ошибку в процентах, что делает ее удобной для интерпретации в масштабах разных систем. Значения MAPE ниже 5 % (табл. 2) указывают на высокую точность предсказания.
Таблица 2
Table 2
Результат расчета средней абсолютной ошибки (MAE) и средней относительной ошибки (MAPE)
The result of calculating the mean absolute error (MAE) and the mean relational percentage error (MAPE)
|
Параметр |
Средняя абсолютная ошибка MAE |
Средняя относительная ошибка MAPE, % |
|
Температура X1 |
0,036 |
0,15 |
|
pH X2 |
0,0003 |
0,0034 |
|
Кислород X3 |
0,007 |
0,09 |
Чем ниже MAE и MAPE, тем выше точность модели. Исходя из полученных результатов, можно сделать вывод, что модель является достаточно точной.
На основе прогнозируемых данных выполняется сравнение с установленными пороговыми значениями, что позволяет адаптивно корректировать параметры системы.
Метод управления на основе анализа данных мониторинга
Алгоритм управления основывается на сравнении прогнозируемых и целевых параметров системы. Также система учитывает эмпирические правила управления. Пример этих правил:
– если x1 > 28 °C, необходимо осуществлять охлаждение воды путем подкачки холодной воды;
– если x1 < 20 °C, необходимо осуществлять циркуляцию воды через нагревательный элемент;
– если x2 > 8,5, необходимо внесение в воду 10–12 % щелочного вещества от дозировки корма;
– если x2 < 6,5, необходимо внесение в воду извести 20 % от массы внесенного за сутки до этого корма;
– если x3 > 8,5, прекратить аэрацию;
– если x3 < 6,0, увеличить аэрацию.
Метод управления на основе анализа данных мониторинга представлен на рис. 7.
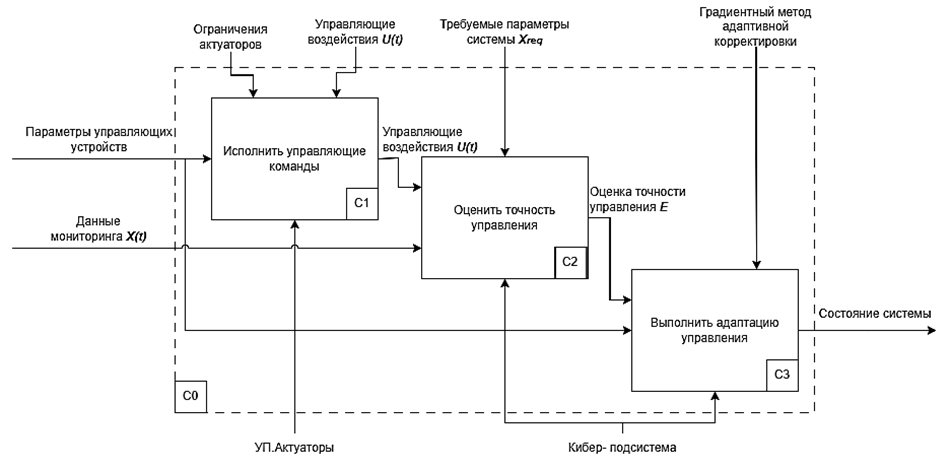
Рис. 7. Метод управления киберфизической системой на основе данных мониторинга
Fig. 7. A method for managing a cyber-physical system based on monitoring data
Для адаптации управления необходимо рассчитать среднюю относительную ошибку, %:
где Xreq – желаемые параметры; Xcur – текущие параметры.
Критериями оценки MAPE являются следующие:
– MAPE < 5 % – очень высокая точность, ошибки практически нет;
– 5 % ≤ MAPE < 10 % – хорошая точность, небольшие отклонения;
– 10 % ≤ MAPE < 20 % – средняя точность, могут быть заметные ошибки;
– MAPE ≥ 20 % – плохая точность, требуется улучшение модели.
В случае выхода за допустимые значения формируются управляющие воздействия, где U – текущие параметры управляющего воздействия [13]:
1. U1 – охлаждение или нагрев воды. Величина U1 регулирует мощность работы системы подогрева или охлаждения:
– положительное значение U1 → увеличение температуры воды;
– отрицательное значение U1 → снижение температуры воды.
2. U2 – коррекция уровня pH. Величина U2 определяет дозировку регуляторов кислотности или щелочности (например, добавление извести или кислоты):
– положительное значение U2 → повышение pH (делает воду более щелочной);
– отрицательное значение U2 → снижение pH (делает воду более кислой).
3. U3 – аэрация воды (насыщение кислородом). Величина U3 задает интенсивность работы компрессоров и аэраторов:
– положительное значение U3 → усиление подачи кислорода;
– отрицательное значение U3 → снижение подачи кислорода (например, отключение аэрации).
4. U4 – подача корма. Величина U4 определяет дозировку корма и является целевой функцией. Для правильного расчета производится адаптация управляющих воздействий U1, U2, U3.
Адаптация параметров управления осуществляется посредством градиентного метода адаптивной корректировки [14]:


где U* – новые параметры управляющего воздействия; α – скорость обучения; ∇E – знак градиента ошибки; k – коэффициент чувствительности (определяется эмпирически); σi – стандартное отклонение данных в этих же единицах; ε – малое число для предотвращения деления на ноль.
Выбор градиентного метода обусловлен его эффективностью при оптимизации сложных многомерных функций, а также возможностью быстрой адаптации модели к изменяющимся условиям.
Каждое управляющее воздействие связано с реальным устройством (нагреватель, дозатор pH, аэратор), которое имеет ограничения мощности
и скорости регулирования:
– U1 (охлаждение/нагрев) – изменение температуры воды зависит от мощности нагревателя/охладителя (например, 1 кВт снижает температуру на 1 °C за 10 мин);
– U2 (коррекция pH) – изменение pH ограничено скоростью растворения химикатов (например, 10 мл реагента изменяют pH на 0,1 в 100 л воды);
– U3 (аэрация) – подача кислорода регулируется компрессорами (1 л/мин увеличивает концентрацию O2 на 0,5 мг/л за 10 мин).
Текущие значения управляющих воздействий:
– U1 = 3,5 кВт – мощность нагревателя;
– U2 = 1 мл/мин – дозировка щелочи;
– U3 = 2,5 л/мин – производительность компрессора.
В качестве примера рассматриваются показатели датчиков прудового хозяйства ООО «Прибой» (с. Новоникольское Быковского района Волгоградской обл.), которое насчитывает 7 прудов, а общая его площадь составляет 4 км2. Адаптированные значения управляющих воздействий представлены в табл. 3.
Таблица 3
Table 3
Оценка отклонения и оптимального шага параметров системы
Estimation of deviation and optimal step of system parameters
|
Параметр |
Целевое |
Реальное |
Разница |
Стандартное |
Оптимальный шаг |
|
Температура X1 |
22 °C |
27,2 °C |
+5,2 °C |
0,8 |
0,125 кВт |
|
pH X2 |
7,2 |
7,6 |
+0,4 |
0,2 |
–0,5 мл/мин |
|
Кислород X3 |
8,0 мг/л |
6,5 мг/л |
–1,5 мг/л |
1,1 |
0,091 л/мин |
В результате адаптированные значения управляющих воздействий будут выглядеть следующим образом:
U1 = 3,5 − 0,125 = 3,375 кВт;
U2 = 1,0 + 0,5 = 1,5 мл/мин;
U3 = 2,5 + 0,091 = 2,591 л/мин.
Для передачи данных между модулями мониторинга и управления с модулем анализа и принятия решений используется технология LoRaWAN, которая позволяет передавать данные на расстояния до 10 км. Архитектура прототипа киберфизической системы показана на рис. 8.
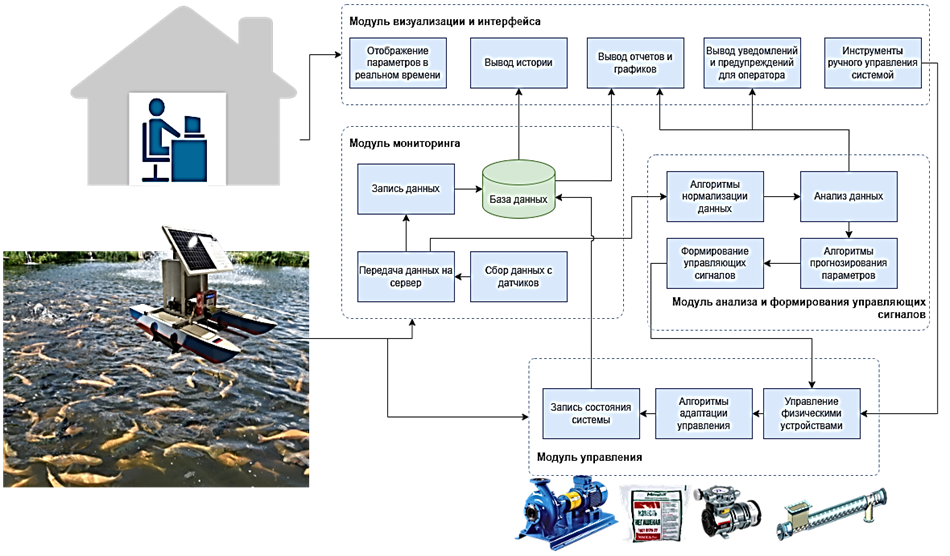
Рис. 8. Архитектура прототипа киберфизической системы
Fig. 8. Prototype architecture of the cyberphysical system
Эксперименты были проведены на предприятиях Волгоградской области, КФХ ИП Я. В. Лозина в поселке Волжанка Среднеахтубинского района и ООО «Прибой» с. Новоникольское Быковского района. Результаты экспериментов (табл. 4) показали, что применение предложенных концепций позволяет повысить точность управления системой на 86 % по сравнению с традиционными методами, снизить потребление ресурсов на 9 % и уменьшить время, затраченное на мониторинг, на 95 % (рис. 9).
Таблица 4
Table 4
Результат внедрения киберфизической системы
Prototype architecture of the cyberphysical system
|
Параметр |
До внедрения |
После внедрения |
Результат, % |
|
Время, затраченное на мониторинг, мин |
20 |
1 |
–95 |
|
Количество аномальных состояний в месяц, шт |
21 |
3 |
–86 |
|
Расход кормовой базы, т |
0,95 |
0,86 |
–9 |

Рис. 9. Временные затраты на выезд замера одного пруда
Fig. 9. Time spent on measuring one pond
Разработанный метод анализа данных мониторинга может применяться не только в системах контроля рыбных хозяйств, но и в других сферах:
– промышленная автоматизация: управление производственными процессами на основе мониторинга технологических параметров;
– медицинская диагностика: прогнозирование изменений физиологических показателей пациентов;
– интеллектуальные транспортные системы: адаптивное управление движением на основе анализа параметров трафика;
– «умные» города: регулирование потребления энергии и воды на основе прогнозирования потребностей.
Заключение
Таким образом, получены следующие новые научные результаты:
1. Новый метод анализа данных мониторинга, отличающийся от существующих процедурой прогнозирования аномальных состояний киберфизических систем в режиме реального времени и механизмом формирования управляющих воздействий на основе эмпирических правил, что позволяет снизить временные затраты на анализ параметров киберфизических систем и вероятность критических состояний системы.
2. Новый метод управления киберфизической системой на основе данных мониторинга, отличающийся адаптивным подходом к регулированию параметров системы с учетом прогнозируемых изменений внешней среды, что позволяет повысить точность управления в условиях открытой внешней среды и снизить затраты ресурсов и необходимость ручного вмешательства в процесс управления.
Предложенный подход применим в различных киберфизических системах, включая системы экологического мониторинга, промышленные автоматизированные комплексы и интеллектуальные инфраструктуры.
Программный продукт был внедрен и прошел испытания на предприятии ООО «Прибой» с. Новоникольское Быковского района Волгоградской области.
В качестве перспективы дальнейших исследований следует выделить масштабирование данных методов в такие сферы, как промышленность, энергетика, здравоохранение.
1. Семенов В. В. Метод мониторинга состояния элементов киберфизических систем на основе анализа временных рядов // Науч.-техн. вестн. информац. технологий, механики и оптики. 2022. Т. 22. № 6. С. 1150–1158. DOI:https://doi.org/10.17586/2226-1494-2022-22-6-1150-1158.
2. Волков Д. А. Комплексный подход к управлению экономической безопасностью предприятий на основе анализа данных и автоматизации в условиях глобальной экономической нестабильности и изменения рыночных условий // Вопр. природопользования. 2024. Т. 3. № 4. С. 58–68. DOI:https://doi.org/10.25726/f7243-7057-1752-x.
3. Кононов Д. В., Чибисова Е. И. Оптимизация бизнес-процессов через инструментальный мониторинг // IP: теория и практика. 2023. № 4. С. 140–152.
4. Sun L., You F. Machine learning and data-driven techniques for the control of smart power generation sys-tems: An uncertainty handling perspective // Engineering. 2021. V. 7. N. 9. P. 1239–1247.
5. Rath K. C., Khang A., Roy D. The role of Internet of Things (IoT) technology in Industry 4.0 economy // Advanced IoT technologies and applications in the industry 4.0 digital economy. CRC Press, 2024. P. 1–28.
6. Ghadami A., Epureanu B. I. Data-driven prediction in dynamical systems: recent developments // Philosophical Transactions of the Royal Society A. 2022. V. 380. N. 2229. P. 20210213.
7. Mohd Ammar, Abid Haleem, Mohd Javaid, Shashi Bahl, Ajay Singh Verma. Implementing Industry 4.0 tech-nologies in self-healing materials and digitally managing the quality of manufacturing // Materials Today: Proceedings. 2022. V. 52. P. 2285–2294.
8. Md Manjurul Ahsan, Parvez Mahmud M. A., Pritom Kumar Saha, Kishor Datta Gupta, Zahed Siddique. Effect of Data Scaling Methods on Machine Learning Algorithms and Model Performance // Technologies. 2021. V. 9. N. 3. P. 52. DOI:https://doi.org/10.3390/technologies9030052.
9. Yu Y., Si X., Hu C., Zhang J. A review of recurrent neural networks: Lstm cells and network architectures // Neural Computation. 2019. V. 31. N. 7. P. 1235–1270. DOI:https://doi.org/10.1162/neco_a_01199.
10. Генов А. А., Русаков К. Д., Хиль С. Ш. Методика решения задачи антиспуфинга по ограниченному количеству фотографий // Программные продукты и системы. 2020. № 1. С. 54–60.
11. Апарнев А. Н., Бартеньев О. В. Анализ функций потерь при обучении сверточных нейронных сетей с оптимизатором Adam для классификации изображений // Вестн. Моск. энергет. ин-та. Вестн. МЭИ. 2020. № 2. С. 90–105. DOI:https://doi.org/10.24160/1993-6982-2020-2-90-105.
12. Khullar S., Singh N. Water quality assessment of a river using deep learning Bi-LSTM methodology: forecast-ing and validation // Environmental Science and Pollution Research. 2022. V. 29. N. 9. P. 12875–12889. DOI:https://doi.org/10.1007/s11356-021-13875-w.
13. Анохина А. З., Ясин Ф. Х., Васильева Л. М. Влияние температуры и гидрохимических показателей воды в прудах на темпы роста карпа и растительноядных рыб // Охрана окружающей среды – основа безопасности страны: cб. ст. по материалам Междунар. науч. эколог. конф., посвящ. 100-летию КубГАУ (Краснодар, 29–31 марта 2022 г.). Краснодар: Изд-во Куб. гос. аграр. ун-та им. И. Т. Трубилина, 2022. С. 176–179.
14. Каширина И. Л., Демченко М. В. Исследование и сравнительный анализ методов оптимизации, используемых при обучении нейронных сетей // Вестн. Воронеж. гос. ун-та. Сер.: Системный анализ и информационные технологии. 2018. № 4. С. 123–132.
