










Россия
Россия
Замена металлических электропроводников волоконно-оптическими элементами на морском и речном флоте приводит не только к экономии металла, но и к повышению энергоэффективности и пожаро-безопасности, т. к. кварцевое волокно пропускает бóльшие оптические мощности, чем медный провод ‒ аналогичные электрические мощности. Перспективным направлением в управлении автоматическими электроприводами и береговыми электроустановками водного транспорта служит применение лазера с модулятором добротности. Например, управляя лазером с помощью модулятора добротности на стоячей немодулированной ультразвуковой волне, подавляют хаотическую «пичковую» генерацию и получают автоколебательный режим, используемый на практике. Применение такого лазера в автоматическом электроприводе придает интеллектуальные свойства управлению объектом водного транспорта. Однако причины возникновения автоколебаний, методы управления автоколебаниями динамических объектов изучены еще недостаточно. В настоящей работе на цифровой модели (ЦМ), созданной на основе трехуровневой системы скоростных дифференциальных уравнений лазера, получены фазовые и временные характеристики автоколебаний лазера как динамической системы при управлении потерями энергии для фиксированных значений скорости доставки энергии. Цифровая модель позволяет в широком диапазоне изменения коэффициента управления, пропорционального потерям энергии, исследовать детально автоколебательный процесс от момента зарождения замкнутой траектории, появления и ликвидации второй гармоники до периодических незатухающих колебаний в форме предельных циклов. Применение ЦМ позволяет регистрировать динамические процессы на фазовой плоскости и временной развертке в широком диапазоне изменения скоростей доставки и потерь энергии. Результаты расчетов применимы для оптимизации автоматизированных электроприводов и береговых электроустановок водного транспорта с лазерными устройствами. Предложенная ЦМ позволяет проводить аналогичные исследования динамических систем разной природы, имеющих структуру энергетических уровней.
цифровая модель, управление, автоколебания лазера как динамической системы, автоматизация, оптимизация, электропривод, лазерное устройство, береговая электроустановка, водный транспорт
Введение
Оптоэлектронные устройства на базе лазеров внедряются в комплексы связи, управления объектов морского и речного флота [1, 2]. Структурная схема автоматического электропривода объекта водного транспорта с лазерным устройством предполагает, что лазер может входить в состав оптоэлектронного регулятора и выполнять для исполнительного устройства функции усилителя сигналов с выхода измерительно-информационного комплекса [3].
Динамика многоуровневой системы определяется соотношением вероятностей переходов атомов (заряженных частиц) между уровнями с учетом разрешенных и запрещенных переходов. Долгоживущие (метастабильные) уровни позволяют накапливать активные носители заряда, переходящие в дальнейшем на нижележащие энергетические уровни с излучением квантов энергии (фотонов). Примером служат трех- и четырехуровневые лазеры, в которых для усиления потока фотонов применены оптические резонаторы, позволяющие фотонам многократно проходить сквозь активную среду (АС) лазера. С увеличением объема АС возрастает число генерируемых типов колебаний (мод) и появляется хаотическое «пичковое» излучение из-за неоднородности усиления в каналах разных мод, что снижает энергоэффективность лазера. Экспериментально было показано, что многомодовый рубиновый лазер при возбуждении в модуляторе добротности (МД) перпендикулярно оси резонатора немодулированной стоячей ультразвуковой волны перестает генерировать хаотические «пички» и начинает излучать в режиме саморегулирования периодическую последовательность импульсов. Частота повторения излучаемых импульсов определяется не частотой ультразвука, а зависит от интенсивности ультразвука и мощности накачки (скорости доставки энергии). Можно полагать, что внутрирезонаторная дифракция Рамана – Ната на стоячей ультразвуковой волне связывает все области АС в пространственно-энергетический однородный континуум для лазерного излучения, что стимулирует самоорганизуемое поведение лазера [4]. Причины автоколебаний, методы управления автоколебаниями лазера как динамической системы требуют комплексного изучения. В настоящей работе предложена цифровая модель, с помощью которой осуществлено модельное управление автоколебаниями лазера как динамической системы; получены фазовые и временные характеристики в зависимости от скорости потерь для заданных значений скорости доставки энергии.
Модель управления автоколебаниями лазера как динамической системы
Адекватная модель для трехуровневого лазера может быть записана в виде системы двух дифференциальных уравнений [5, 6]:
 (1)
(1)
 (2)
(2)
где системные переменные: n(t) – приведенная населенность верхнего уровня лазерного перехода; m(t) – приведенное число фотонов; t – время; параметры: W – скорость накачки; τэ – эффективное время жизни возбужденного состояния АС; Nо = Nв + Nн – общая населенность лазерного перехода: Nв ‒ верхнего уровня, Nн – нижнего уровня; B – эйнштейновский коэффициент; Bm(t) – скорость индуцированных переходов; τр – время жизни фотона в резонаторе, τр = 2L / (Cα), где L, C, α – длина резонатора, скорость света, потери излучения соответственно.
Коэффициент 2 системы (1), (2) учитывает, что в трехуровневой модели увеличение количества фотонов на единицу сопровождается уменьшением на единицу населенности верхнего уровня лазерного перехода. Наличие в уравнениях квадратичной нелинейности свидетельствует о возможности автоколебательной динамики системы.
Введем новые обозначения согласно синтаксису MATLAB.
Системные переменные: x(t) = n(t) – пропорциональна действующей концентрации населенности, y(t) = m(t) – пропорциональна числу квантов энергии (фотонов); коэффициенты: «k» = (W ‒ ![]() ) ×
) × – характеризует скорость доставки энергии, «c»*y(t) – характеризует скорость индуцированных переходов, «d» =
– характеризует скорость доставки энергии, «c»*y(t) – характеризует скорость индуцированных переходов, «d» = ![]() ~ α ‒ управляющий коэффициент, пропорциональный потерям энергии. Исследуемый объект имеет численные значения коэффициентов, причем «k», «c»*y(t), «d» имеют размерность 1 / с, где с – секунда.
~ α ‒ управляющий коэффициент, пропорциональный потерям энергии. Исследуемый объект имеет численные значения коэффициентов, причем «k», «c»*y(t), «d» имеют размерность 1 / с, где с – секунда.
Система дифференциальных уравнений при-
мет вид
В матричной форме

Для расчетов применен файл sah1064dst.m с встроенной строкой [Lorenz], содержащей оператор @(tx), решатель ode45 [7]. Моделирование выполняется на временном интервале t0 = 0, t1 = 10 c. Вектор начальных условий [2–5]:
% sah1064dst.m
k = 10, c = 1, d = 0;
[Lorenz]=@(t, x) [k*x(1) – 2c*x(1)*x(2); c*x(1)* – d*x(2)];
[t, x] = ode45(Lorenz, [0 10],[2,5]);
plot(x(:,1), x(:2)),grid
title (‘Аттрактор’)
xlabel (‘x(t)’);
ylabel (‘y(t)’);
%Для вывода временных характеристик:
plot(t,x(:,1),t,x(:,2)),grid
axis([0 1 6 4])
title(ꞌВременные характеристикиꞌ)
xlabel(ꞌВремя:t,cꞌ);
ylabel(ꞌПоток фотонов: y(t), относительные единицыꞌ);
Фазовые и временные характеристики
На рис. 1 представлены фазовые диаграммы
и временные характеристики трехуровневой динамической системы для фиксированных значений коэффициентов «k», «c» и разных значений коэффициента управления «d».
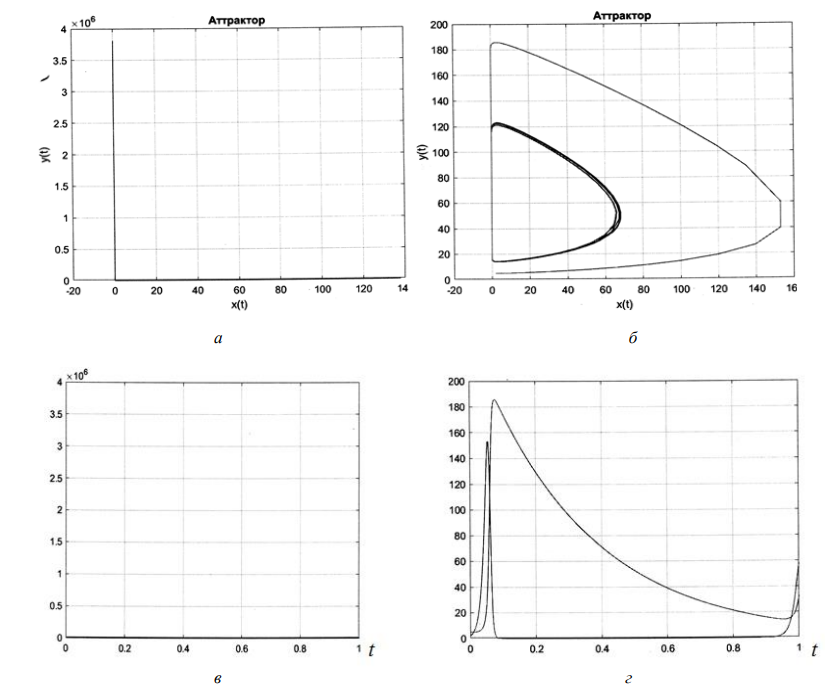

Рис. 1. Динамика системы уравнений (3), (4) при постоянных коэффициентах «k» = 100, «c» = 1
в зависимости от значений параметра управления «d»: 0 (а, в), 1 (д), 3 (б, г), 10 (е);
а, б, д, е, – аттракторы; в, г – временные характеристики
(по оси ординат отложены переменные x(t), y(t) в относительных единицах)
Fig. 1. Dynamics of the equations system (3), (4) at constant coefficients “k” = 100, “c” = 1 depending on the values
of the control parameter “d”: 0 (а, в), 1 (д), 3 (б, г), 10 (е); а, б, д, е, – attractors; в, г – time characteristics
(by ordinate axis placed variable x(t), y(t) in relative units)

Рис. 1 (окончание). Динамика системы уравнений (3), (4) при постоянных коэффициентах «k» = 100, «c» = 1
в зависимости от значений параметра управления «d»: 1 (ж), 10 (з), 100 (и, к); и – аттракторы;
ж, з, к – временные характеристики (по оси ординат отложены переменные x(t), y(t) в относительных единицах)
Fig. 1 (ending). Dynamics of the equations system (3), (4) at constant coefficients “k” = 100, “c” = 1
depending on the values of the control parameter “d”: 1 (ж), 10 (з), 100 (и, к); и – attractors;
ж, з, к – time characteristics (by ordinate axis placed variable x(t), y(t) in relative units)
Система уравнений (3), (4) управляема в широком диапазоне значений коэффициента «d», определяющего потери квантов энергии (фотонов) (см. рис. 1). При «d» ≤ 0 автоколебательность «запрещена» (см. рис. 1, а, в). При «d» ≥ 0 система проходит несколько этапов автоколебательного движения. Так, при «d» = 1 только зарождается циклическое движение (см. рис. 1, д, ж). При «d» = 3 система демонстрирует появление второй гармоники (рис. 1, б, г). При дальнейшем развитии динамики вторая гармоника не поддерживается, наблюдается на фазовой плоскости рост ширины полосы непересекающихся витков и на временной зависимости – равенство частот повторения и амплитуд импульсов переменных x(t) и y(t), «d» = 10 (см. рис. 1, е, з). С ростом частоты автоколебаний может наблюдаться слияние витков около предельного цикла и превышение амплитуды импульсов переменной y(t) над амплитудой импульсов переменной x(t) при той же частоте их повторения, например двойное превышение при «d» = 100 (см. рис. 1, и, к). Исследованные асимптотически устойчивые стационарные движения можно рассматривать как аттракторы – притягивающие множества [8].
Отметим, что обнаруженное превышение амплитуды импульсов переменной y(t) над амплитудой импульсов переменной x(t) с ростом частоты автоколебаний наблюдается при постоянной скорости накачки, характеризуемой коэффициентом «k» = 100. Этой скорости накачки уже недостаточно для выравнивания амплитуд импульсов переменных x(t) и y(t) на частоте следования импульсов fи = 8,9 Гц (см. рис. 1, и, к). Следовательно, недостаточная скорость накачки накладывает ограничение на максимальную частоту автоколебаний. Максимальная частота автоколебаний рассматриваемой системы при «k» = 100; «c» = 1; «d» = 100 не превышает fи max = 10 Гц. Аналогичное ограничение действует при кратном уменьшении коэффициента накачки «k» (рис. 2).

Риc. 2. Динамика системы уравнений (3), (4) при двух значениях коэффициента «k»
и постоянных значениях коэффициентов «c» = 1 и «d» = 100: «k» = 25 (а, в), «k» = 6,25 (б, г);
а, б – аттракторы; в, г – временные характеристики (по оси ординат отложены переменные x(t), y(t)
в относительных единицах)
Fig. 2. Dynamics of the equation system (3), (4) at two values of the coefficient “k”
and constant values of coefficients “c” = 1 and “d” = 100: “k” = 25 (a, в), “k” = 6.25 (б, г);
а, b – attractors; в, г – time characteristics (by ordinate axis placed variable x(t), y(t) in relative units)
Таким образом (см. рис. 1 и 2), при уменьшении «k» в 4 раза (от 100 до 25) максимальная частота автоколебаний уменьшилась с 8,9 до ~ 4 Гц, т. е. в 2 раза (см. рис. 2, в); при уменьшении «k» в 16 раз (до 6,25) частота автоколебаний уменьшилась до ~ 1 Гц (см. рис. 2, г).
Обсуждение
Получены фазовые и временные характеристики управления автоколебаниями лазера как динамической системы на цифровой модели, представленной трехуровневой системой скоростных дифференциальных уравнений. Модель позволяет в широком диапазоне изменения коэффициента управления «d», пропорционального потерям энергии на излучение, исследовать автоколебательный процесс (с регистрацией на фазовой плоскости и на временной развертке) от момента зарождения замкнутой траектории до периодических незатухающих колебаний в форме предельных циклов. В частности, обнаружено появление траектории второй гармоники при малых значениях управляющего коэффициента «d» = 3 («k» = 100, «c» = 1) (см. рис. 1, б, г), которая пропадает с ростом «d»; выявлена зависимость максимальной частоты автоколебаний от накачки (скорости доставки энергии) при остальных неизменных параметрах. Из сравнения длительности синхронных импульсов переменных x(t) и y(t) можно оценить разницу переходных процессов при доставке и расходе энергии для остальных известных параметрах динамической системы. На основе полученных результатов можно полагать, что автоколебательному поведению динамической системы способствует ряд свойств: трех- (и более) уровневая энергетика с квантовыми переходами между уровнями; управление выходными потоками квантов энергии; контроль баланса доставляемой и расходуемой энергии, обеспечивающего стабильность пространственно-временных характеристик системы. Цифровая модель, созданная на основе системы скоростных дифференциальных уравнений лазера, обладает высокой чувствительностью к управлению потерями энергии и позволяет изучить динамику различных по природе динамических объектов при наличии в них энергетических структур.
Заключение
Исследовано управление автоколебаниями лазера как динамической системы в зависимости от внутрирезонаторных потерь излучения. Показано, что при малых потерях излучения, пропорциональных коэффициенту управления «d» (3 % от максимального значения), лазер излучает вторую гармонику, которая пропадает с ростом коэффициента «d». Частота следования импульсов переменных x(t) и y(t) одинакова, но амплитуды импульсов могут отличаться. Могут отличаться и длительности импульсов, например, полуширина импульса переменной y(t) превышает полуширину импульса переменной x(t) в 15 раз (см. рис. 2, г). Отмеченные отличия при автоколебаниях могут быть связаны
с разными как длительностями переходных процессов, так и значениями отношений доставляемой и расходуемой энергии. Предложенная цифровая модель создана на основе трехуровневой лазерной системы скоростных дифференциальных уравнений; для расчетов применен файл sah1064dst.m с встроенной строкой, содержащей оператор @(tx), и решатель ode45. Автоколебательный процесс исследовался детально от момента зарождения замкнутой траектории, появления и ликвидации второй гармоники до периодических незатухающих колебаний в форме предельных циклов. Цифровая модель позволяет вести исследования с регистрацией на фазовой плоскости и временной развертке в широком диапазоне изменения скоростей как доставки, так и потерь энергии. Предложенная цифровая модель позволяет проводить аналогичные исследования на объектах разной природы, в которых имеется энергетическая структура.
Результаты расчетов важны для оптимизации автоматических электроприводов и береговых электроустановок объектов водного транспорта с оптоэлектронными лазерными устройствами.
1. Катанович А. А., Николашин Ю. Л. Корабельные оптические системы связи. СПб.: Судостроение, 2009. 248 с.
2. Терентьев В. Е., Очина Л. Б., Белоусова И. М., Русов В. А., Андреев А. А. Оптическая генерация тока и магнитного поля в динамических электротехнических комплексах // Вестн. Астрахан. гос. техн. ун-та. 2022. № 2 (74). С. 38‒47.
3. Терентьев В. Е. Особенности применения многомодовых лазеров в электроприводах // Сб. науч. ст. Национ. науч.-практ. конф. проф.-препод. состава ФГБОУ ВО «ГУМРФ им. адм. С. О. Макарова» (Санкт-Петербург, 30 сентября – 20 октября 2024 г.). Санкт-Петербург: Изд-во ГУМРФ им. адм. С. О. Макарова, 2025. Т. 3. С. 125–129.
4. Терентьев В. Е. Лазерно-ультразвуковое когнитивное преобразование энергии и информации в электроприводе // Вестн. Астрахан. гос. техн. ун-та. Сер.: Управление, вычислительная техника и информатика. 2025. № 1. С. 39‒45.
5. Айрапетян В. С., Ушаков О. К. Физика лазеров: учеб. пособие. Новосибирск: Изд-во СГГА, 2012. 134 с.
6. Красильников С. С., Красильникова Н. А., Савченко И. А., Тарасова В. В. Оптический квантовый генератор на рубине. Лазер. М.: УНЦ ДО, 2005. 55 с.
7. Барышников С. О., Вихров Н. М., Кузьмин А. А., Сахаров В. В. Компьютерные модели популяционной динамики в экологических системах: учеб. пособие. СПб.: Изд-во ГУМРФ им. адм. С. О. Макарова, 2024. 110 с.
8. Куликовская Н. В., Морозов В. М. Аттрактор Лоренца. М.: Изд-во МГУ им. М. В. Ломоносова, 2022. 23 с.
