











The article presents a new theory of designing commercial fishing gear based on the use of the theory of similarity of multiphysical processes occurring in commercial fishing gear and their elements at all stages of operation, as well as digital twins of fishing vessels, fishing mechanisms. The new theory of designing tools for commercial fishing based on taking into account the multiphysical processes occurring in fishing units and fishing objects. Providing multiphysical processes, digitizing them on the basis of digital twins makes it possible to clarify the hydrodynamic coefficients of parts and elements of commercial fishing gear. There is described the relationship between physical processes and digital analogues (digital twins). The refinement of the coefficients is associated with iterative methods. The choice of the criterion of similarity of multiphysical processes of commercial fishing gears is justified. When solving design problems, the theory of similarity makes it possible to: substantiate the characteristics of industrial fishing gear related to its size, resistance, movement speed (movement of water masses for passive fishing gear and traps), based on ensuring the maneuverability of the trawl system and other systems with known energy and power characteristics of a fishing vessel and a warp winch and other fishing mechanisms; to substantiate the characteristics of the warp winch and other fishing mechanisms that provide the specified modes of performing fishing operations (for example, lowering and lifting the trawl) of known designs; substantiate the characteristics of a fishing vessel based on ensuring the rational operation of a known (designed and operated) design of a fishing gear under given modes; investigate emergency and critical situations associated with hitting underwater obstacles by fishing gear, a sharp increase in efforts in warps, a purse non-water tourniquet with a rapid change in control actions, etc.; to substantiate the characteristics of the warp winch and other fishing mechanisms, as well as the fishing vessel for the development of the Auto trawl system.
trawl, designing, similarity, digital twin, commercial fishing gear, operation
Введение
Проектирование орудий промышленного рыболовства непосредственно связано с созданием теории проектирования, которую разработали профессор Ф. И. Баранов и его ученики [1–3]. Профессором А. Л. Фридманом применена теория подобия с учетом прототипа для проектирования [2]. Специалистами в области промышленного рыболовства данный метод проектирования усовершенствовался и были получены хорошие результаты на промысле гидробионтов с новыми орудиями рыболовства [4, 5].
Теорию нестационарного движения траловой системы разработали А. Л. Фридман и Б. А. Альтшуль [2, 6]. Теория должна была послужить продолжением теории проектирования тралов, но в связи с ограниченным использованием ЭВМ в 80-х гг. ее внедрение в практическое использование отложили.
На современном этапе развития теории проектирования важным переходным этапом от традиционного проектирования орудий промышленного рыболовства и их элементов «по прототипам» к проектированию сложных динамичных систем являются прототипы, которые выполняют мультифизическое моделирование [7–9], и «цифровые двойники».
«Цифровой двойник» орудий рыболовства, выполненный с соблюдением всех требований, не просто является набором сведений об инженерном сооружении, которым является орудие промышленного рыболовства, переведенным в электронный формат, а становится важным инструментом при проектировании орудий промышленного рыболовства с учетом мультифизического моделирования (рис. 1).
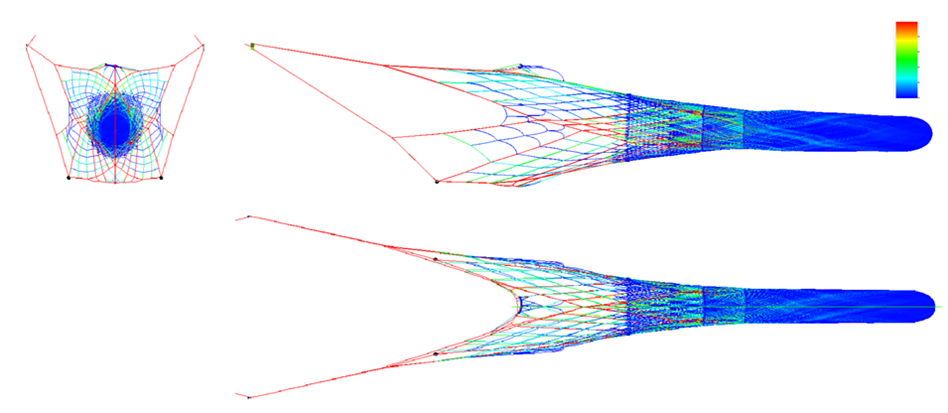
Рис. 1. «Цифровой двойник» разноглубинного трала
Fig. 1. Digital twin of a midwater trawl
«Цифровой двойник» является цифровой копией некоторого объекта или процесса, реализует их имитацию на вычислительном устройстве. В нашем случае «цифровой двойник» выполняет цифровую имитацию промыслового комплекса «судно – трал» (рис. 2).
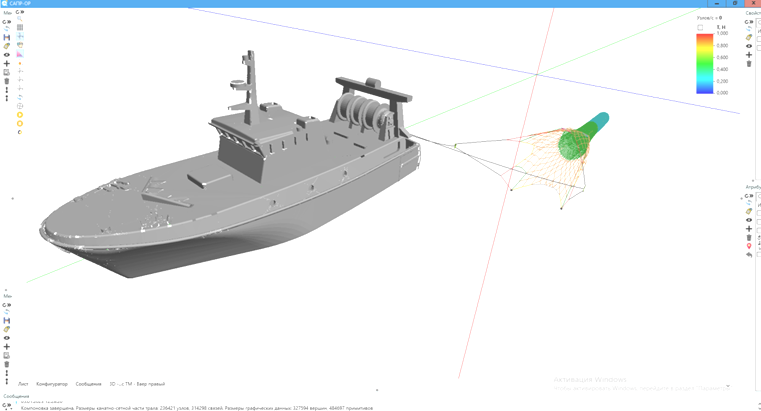
Рис. 2. «Цифровые двойники» рыболовного судна и разноглубинного трала
Fig. 2. Digital twins of a fishing vessel and a midwater trawl
В создании орудия промышленного рыболовства задействованы большие ресурсы, участвуют различные подразделения и подрядчики, поэтому важно использовать теорию мультифизического подобия [10, 11].
Следует отметить, что в настоящее время применение «цифровых двойников» в мире активно развивается, находясь на начальной стадии, поэтому российские производители систем автоматизированного проектирования (САПР) орудий рыболовства вполне могут опередить зарубежных коллег [12].
Основные этапы проектирования с применением «цифрового двойника» и эксплуатации разноглубинного трала показаны на рис. 3.
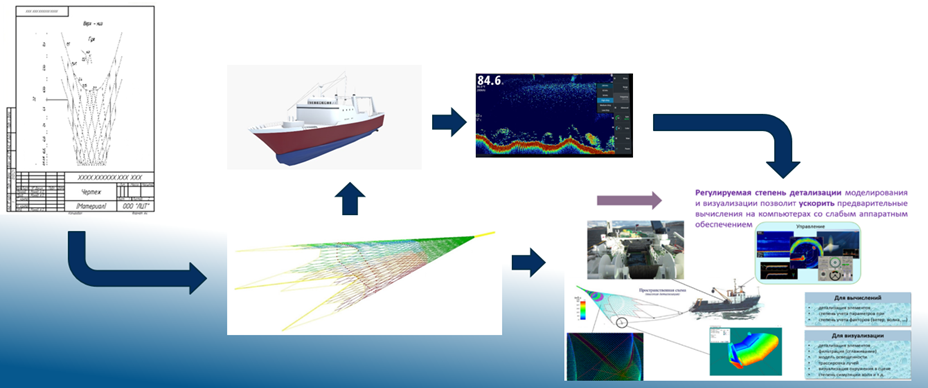
Рис. 3. Основные этапы проектирования с применением «цифровых двойников»
и эксплуатации разноглубинного трала
Fig. 3. Main stages of design using digital twins and a midwater trawl
Целевой рынок САПР орудий промышленного рыболовства показан на рис. 4.
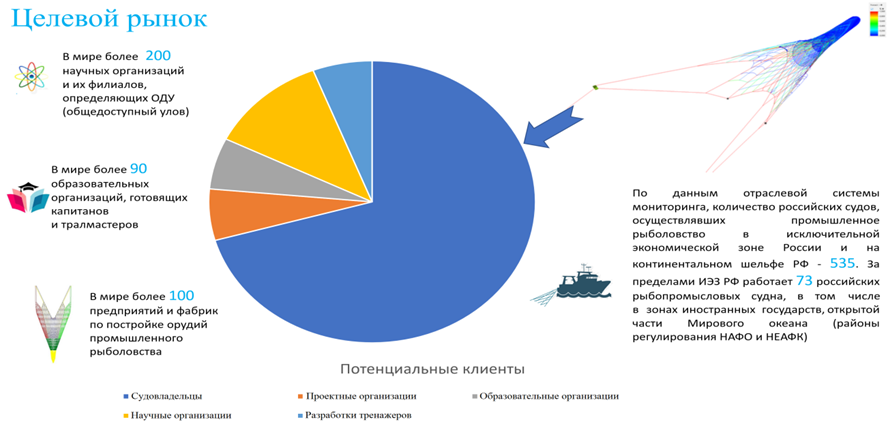
Рис. 4. Целевой рынок САПР
Fig. 4. Target market for CAD
К достоинствам САПР орудий рыболовства относятся:
– внедрение САПР на фабрики по проектированию и постройке орудий промышленного рыболовства;
– использование САПР на рыболовных судах и в организациях по подготовке и контролю промысла;
– внедрение цифровых технологий в учебный процесс;
– разработка дополнительных программ образования;
– стандартизация общих требований конструкторской документации на орудия рыболовства;
– ведение базы данных орудий рыболовства;
– совершенствование и разработка отраслевых стандартов;
– разработка 3D орудий рыболовства;
– загрузка 3D рыболовных судов в САПР;
– статика и динамика (проект) процессов эксплуатации орудий рыболовства (настройка орудий рыболовства);
– разработка тренажера эксплуатации орудий рыболовства.
Постановка задачи
Проблема проектирования орудий промышленного рыболовства решается с использованием технологий искусственного интеллекта и предсказательных моделей на нейронной сети [13–15]. Для решения обозначенной проблемы ставятся задачи долгосрочного, среднесрочного и краткосрочного прогнозирования по заданным критериям с использованием архивных данных с промысла и текущих выборок эхолокации. Определяются входные параметры нейронной сети, задаваемые пользователем (коды района промысла, трала, объекта лова, его размеры и др.); расчетные значения, вычисляемые по динамическим математическим моделям и пользовательским критериям (код места промысла, время суток и др.); выходные характеристики (величина улова, расход топлива, финансовые затраты); критерии отбора и группировки выходной информации.
Автоматизация проектирования орудий промышленного рыболовства позволит решать вопросы по определению оптимальных мест промысла с учетом энергетических и экономических затрат, собирать статистику уловов, ускорять, уточнять и упрощать ее анализ, генерировать аналитические отчеты. Важным элементом САПР являются математические модели гидробионтов, на основании которых прогнозируются уловы всех орудий промышленного рыболовства [16]. Так, к примеру, создана программа для ЭВМ для расчета гидродинамики распорных траловых досок [17]. Программа написана на языках программирования C++ и HLSL. Данная компьютерная программа позволяет решать системы дифференциальных уравнений Навье – Стокса итерационно с использованием метода покоординатного расщепления, линеаризации с получением трехдиагональных систем и их последующим решением методом прогонки.
На рис. 5 изображена траловая доска при ее буксировке в воде, точнее, имитационное моделирование процесса обтекания траловой доски потоком воды.
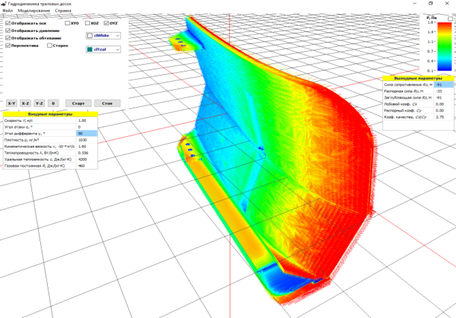
Рис. 5. «Цифровой двойник» траловой доски
Fig. 5. Digital twin of a trawl board
В вышеуказанной программе возможно моделировать любые детали и элементы орудий промышленного рыболовства. На рис. 6 изображено имитационное моделирование кухтыля в форме шара, на рис. 7 изображен процесс обтекания частицами воды крученого каната (его элемента).
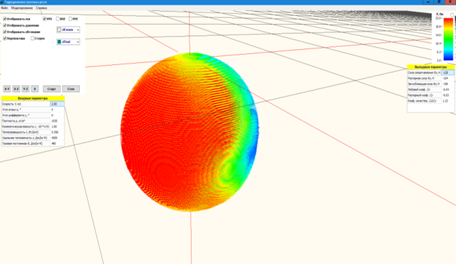
Рис. 6. «Цифровой двойник» кухтыля
Fig. 6. Digital twin of a large float
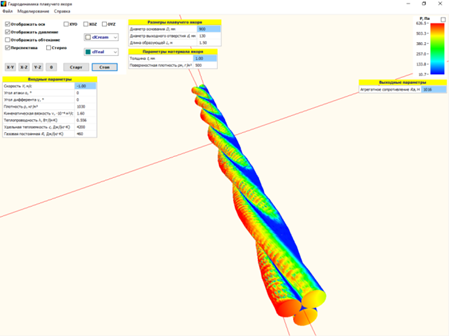
Рис. 7. «Цифровой двойник» крученого каната
Fig. 7. Digital twin of a twisted rope
Отметим, что для «цифровых двойников» нет понятия «преобладающее значение» для условий движения или эксплуатации орудий промышленного рыболовства. Дело в том, что в «цифровых двойниках» моделируются все процессы (значимые и второстепенные), т. к. на разных стадиях эксплуатации они могут поменять первостепенность. Не может идти речи о несущественности того или иного критерия подобия для управления орудиями рыболовства в 6D. Таким образом, проектирование «жизненного цикла» орудий промышленного рыболовства возможно только при использовании теории мультифизического подобия и «цифровых двойников».
Методы
Буксировочная мощность рыболовного судна (далее судна) Nб будем рассматривать как мощность траления Ns. Мощность траления, или эффективная мощность рыболовного судна, зависит от секундного расхода энергии двигателя (т. е. его мощности Nd), а также КПД двигателя ηd. При данной скорости траления v сила тяги уравновешивается силой сопротивления трения, волнового и вихревого сопротивления, сопротивления воздуха, сопротивления винта, создаваемой как рыболовным судном, так и активным (буксируемым) орудием рыболовства (к примеру, тралом), что в конечном итоге при данной мощности двигателя определяет скорость траления. Грубо для рыболовного судна мощность может быть определена на стадии его проектирования в гидроканале или опытовом бассейне на моделях рыболовного судна и орудия рыболовства (трала).
Мощность траления Ns – мощность, которую необходимо затратить на преодоление сил сопротивления. Мощность траления необходимо затратить непосредственно на движение судна с заданной скоростью. Согласно определению понятия мощности, она равна
![]() , (1)
, (1)
где Rsh – сила сопротивления трения, волнового и вихревого сопротивления воды, сопротивления воздуха, сопротивления винта, создаваемая рыболовным судном (буксировочное сопротивление); Ra – сила сопротивления тралового комплекса (агрегатное сопротивление трала).
Так как силу сопротивления воды движению натурного судна можно определить путем измерения динамометром, включенным в буксирный канат при буксировке его со снятым движителем, то ее называют буксировочным сопротивлением Rsh. Для поддержания движения судна необходимо преодолеть силу буксировочного сопротивления и агрегатного сопротивления трала путем приложения равной и противоположно направленной толкающей силы, создаваемой движителем. Таким образом, при буксировке трала на определенное расстояние совершается работа As. Мощность, затрачиваемая на продвижение судна, ввиду непрерывности процесса движения, оценивается расходом энергии Es в единицу времени t. Эффективную и пропульсивную мощности представим на рис. 8.
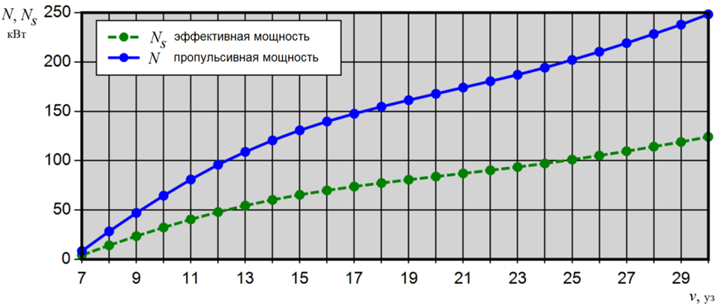
Рис. 8. Зависимости N = f(v) и Ns = f(v)
Fig. 8. Dependencies N = f(v) and Ns = f(v)
Важным элементом проектирования орудий промышленного рыболовства является связка с параметрами рыболовного судна, такими как мощность траления Ns и располагаемая тяга рыболовного судна Pp. Так как мощность рыболовного судна находится в прямой зависимости от мощности двигателя, разделим выражение (1) на время t процесса тралового лова (эксплуатации):
![]() . (2)
. (2)
Так как производительность сил буксировки рыболовного судна Нs равна [18]
Нs = Ns / t, (3)
а отношение w = v / t представим как ускорение процесса тралового лова, тогда (2), с учетом, что производительность сил сопротивления рыболовного судна и трала Нa, примет вид
Ha = Rsh + Ra; (4)
Hs = Hsh + Ha, (5)
где Hsh = Rsh w – производительность сил сопротивления рыболовного судна; Ha = Ra w – производительность сил сопротивления трала (агрегатного сопротивления).
Представим (5) в виде
Hs – Hsh = Ha, (6)
где Нp = Hs – Hsh – производительность располагаемой тяги рыболовного судна (100 %), или
Нp = Ha. (7)
В случае использования не 100 % располагаемой тяги рыболовного судна равенство (7) может быть представлено в виде
Ha = k Нp, (8)
где k – коэффициент производительности располагаемой тяги рыболовного судна, k ≤ 1.
Рассмотрим масштаб производительности сил, создаваемых траловой системой
CH = 1, (9)
где CH – масштаб производительности сил.
![]() , (10)
, (10)
где CR – масштаб сил; Cw – масштаб ускорения процессов тралового комплекса; Ct – масштаб времени; CN – масштаб мощности располагаемой тяги рыболовного судна; Cv – масштаб скорости.
При этом для рыболовного судна
CH = CN / Ct, (11)
для траловой системы
![]() , (12)
, (12)
где Cm – масштаб массы.
Необходимо отметить, что при изменении параметров орудий промышленного рыболовства в течение времени (переходные процессы, спуск и выборка орудий промышленного рыболовства и т. п.) нет необходимости пересчитывать масштабы подобия, т. к. они в динамике остаются равными и не зависят от продолжительности процесса во времени.
Для обеспечения подобия необходимо задаться линейным масштабом Cl. В некоторых случаях возможно задаваться и другими масштабами подобия. Так, к примеру, из выражения масштаба скорости
![]()
получим

или
![]() .
.
По аналогии выполним те же действия для выражения масштаба сил CR через масштаб массы Cm:
![]() ,
,
и для выражения масштаба эффективной (полезной) мощности рыболовного судна (лодки и другого плавсредства) CN:
![]() . (13)
. (13)
Выраженный через соответствующие масштабы масштаб сил CR позволяет обосновывать необходимые проектные характеристики тралового или другого активного комплекса. Вышеуказанные действия при необходимости возможно выполнять и с другим масштабом, отличным от CR, к примеру масштаб мощности CN в зависимости от масштаба скорости Cv:
![]() .
.
Следует отметить, что решение задач проектирования орудий промышленного рыболовства с учетом (1)–(12) базируется на условиях полного подобия, которое необходимо при использовании «цифрового двойника». Возможность отклонения от ряда требований геометрического и силового подобия управляется величиной масштабного эффекта, величина которого по искомым проектным характеристикам прогнозируема.
В «цифровых двойниках» моделируются все процессы, т. к. на разных стадиях эксплуатации они могут поменять первостепенность. Зная Cl, из приведенных формул можно определить все масштабы, причем возможно первоначально задать силовой масштаб CR, а далее из (13) определить значение Cl и все остальные масштабы. Также можно задать любой необходимый масштаб, а затем найти значение Cl и другие масштабы.
Результаты и обсуждение
В процессе проектирования орудий промышленного
рыболовства необходимо использовать математический аппарат, а именно математические, имитационные и предсказательные модели процессов эксплуатации орудий промышленного рыболовства. В процессе проектирования необходимо использовать теорию мультифизического подобия орудий и процессов рыболовства. Важно понимать, что все процессы эксплуатации орудий промышленного рыболовства описать математически
и имитационно невозможно, т. к. такие процессы очень сложны в описании. Это такие процессы, как спуск и выборка трала, выборка кошелькового невода (движение на поверхности неводовыборочного барабана слоев сетной части невода и др.), выборка донного невода и другие динамические процессы, не говоря уже о процессах износа и т. п., которые протекают в заданные промежутки эксплуатации орудий промышленного рыболовства. При этом все критерии подобия известны и представлены в индикаторном виде, и в этой связи теория мультифизического подобия обеспечивает схожесть процессов, протекающих в натурном орудии рыболовства и его модели. С помощью симуляции процессов возможно добиться наилучших результатов проектирования орудий промышленного рыболовства.
«Цифровые двойники» позволяют обеспечить оптимальные варианты проектов орудий промышленного рыболовства, критерии оптимизации позволяют достичь максимального соответствия поставленным требованиям.
Производительность сил рыболовной единицы, которой является рыболовное судно, промысловый механизм и орудие промышленного рыболовства, сопряжена с КПД [18]. Таким образом, увеличение КПД или производительности лова возможно при проектировании эффективных орудий промышленного рыболовства на основании теории мультифизических процессов и «цифровых двойников». Математические модели орудий и процессов рыболовства, используемые при проектировании, являются адекватными, они получены теоретическими и экспериментальными методами [19, 20].
Заключение
Изложенная теория находит применение при решении различных задач промышленного рыболовства. Эти задачи можно разделить на два класса: задачи, связанные с проектированием орудий промышленного рыболовства, и задачи, связанные с их эксплуатацией. В обоих случаях теория подобия позволяет еще на стадии проектирования проанализировать взаимозависимость параметров, характеризующих данную систему (к примеру, траловую систему), и выбрать их так, чтобы обеспечить максимальную эффективность орудия промышленного рыболовства в процессе его эксплуатации.
При решении задач проектирования теория подобия позволяет:
– обосновать характеристики орудий промышленного рыболовства, связанные с его размерами, сопротивлением, скоростью движения (движения водных масс для пассивных орудий рыболовства
и ловушек), исходя из обеспечения маневренных качеств траловой системы и других систем при известных энергетических и мощностных характеристиках рыболовного судна и ваерной лебедки и других промысловых механизмов;
– обосновать характеристики ваерной лебедки
и других промысловых механизмов, обеспечивающие заданные режимы выполнения промысловых операций (к примеру, спуск/подъем трала) известных конструкций;
– обосновать характеристики рыболовного судна, исходя из обеспечения рациональной эксплуатации известной (спроектированной и эксплуатируемой) конструкции орудия рыболовства при заданных режимах;
– исследовать аварийные и критические ситуации, связанные с задевом орудием рыболовства подводных преград, резким возрастанием усилий
в ваерах, жгуте кошелькового невода при быстром изменении управляющих воздействий и т. п.;
– обосновать характеристики ваерной лебедки
и других промысловых механизмов, а также рыболовного судна.
При решении задач эксплуатации орудий промышленного рыболовства теория позволяет:
– исследовать различные режимы спуска и подъема трала, донного невода и других орудий рыболовства при заданных энергетических и мощностных характеристиках рыболовного судна и веерной лебедки и других промысловых механизмов;
– исследовать режимы перевода трала с одного горизонта на другой путем изменения скорости рыболовного судна (шагового отношения) или длины вытравленных ваеров (крутящего момента на барабане ваерной лебедки), а также путем одновременного проведения обеих указанных операций;
– осуществлять заранее заданные режимы движения трала или других элементов облавливающего комплекса, например проведение трала по заданной траектории с целью обхода подводной преграды или облова на склоне, спуск трала с минимально допустимой горизонтальной составляющей скорости, ограничение усилий в ваерах и др.;
– решать задачи прицельного наведения трала на косяк;
– находить для тралового комплекса предельные значения различных эксплуатационных параметров (глубины хода трала, его скорости при тралении или выборке и др.);
– определять время перевода траловой системы при заданном законе управления;
Кроме того, на базе данной теории возможно обоснованно и грамотно решать вопросы оптимизации проектирования и управления. В задачах проектирования это означает создание методики, позволяющей так выбрать конструктивные параметры орудий рыболовства, чтобы обеспечить наибольшую эффективность ее работы в процессе эксплуатации. В задачах управления это означает разработку методов наиболее рационального осуществления промысловых операций (к примеру, прицельного наведения трала на косяк, спуска или подъема трала и др.).
В статье приводится отличная от всех существующих подходов методика проектирования орудий промышленного рыболовства, основанная на использовании теории подобия мультифизических процессов, протекающих с орудиями рыболовства и их элементами на всех стадиях эксплуатации, а также «цифровых двойников» рыболовных судов (промысловых механизмов), орудий рыболовства и их элементов. Обоснован выбор критерия подобия мультифизических процессов орудий промышленного рыболовства.
1. Baranov F. I. Izbrannye trudy. Tehnika promyshlennogo rybolovstva. M.: Pisch. prom-st', 1969. T. 1. 719 s.
2. Fridman A. L. Teoriya i proektirovanie orudiy promyshlennogo rybolovstva. M.: Leg. i pisch. prom-st', 1981. 327 s.
3. Rozenshteyn M. M. Proektirovanie orudiy rybolovstva: ucheb. M.: Kolos, 2009. 400 s.
4. Levchenko S. V. Gibridnaya model' processa lova atlanticheskoy sel'di raznoglubinnym tralom // Izv. Kaliningr. gos. tehn. un-ta. 2010. № 20. S. 187-194.
5. Levchenko S. V. Gibridnaya model' processa lova okunya-klyuvacha v more Irmingera // Rybnoe hozyaystvo. 2012. № 3. S. 94-97.
6. Al'tshul' B. A., Fridman A. L. Dinamika tralovoy sistemy. M.: Agropromizdat, 1990. 237 s.
7. Nedostup A. A. Fizicheskoe modelirovanie gidrodinamicheskih processov dvizheniya orudiy rybolovstva // Vestn. Tom. gos. un-ta. Matematika i mehanika. 2012. № 3 (19). S. 55-67.
8. Nedostup A. A. Fizicheskoe modelirovanie orudiy i processov rybolovstva: monogr. Kaliningrad: Izd-vo KGTU, 2012. 375 s.
9. Nedostup A. A., Razhev A. O. Proizvoditel'nost' sil tralovoy sistemy - II: fizicheskoe modelirovanie // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Rybnoe hozyaystvo. 2021. № 3. S. 86-93.
10. Nedostup A. A., Razhev A. O. Sozdanie pravil mul'tifizicheskogo podobiya tralovogo kompleksa // Morskie intellektual'nye tehnologii. 2021. T. 1, № 1. S. 132-137.
11. Nedostup A. A., Razhev A. O. Kriterii mul'tifizicheskogo podobiya tralovogo kompleksa // Morskie intellektual'nye tehnologii. 2021. T. 1, № 4. S. 237-242.
12. OOO «LCT»: oficial'nyy sayt. URL: https://digitechlab.ru (data obrascheniya: 12.12.2022).
13. Nedostup A. A., Razhev A. O., Nasenkov P. V., Konovalova K. V. Proizvoditel'nost' sil tralovoy sistemy - V: predskazatel'noe modelirovanie // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Rybnoe hozyaystvo. 2022. № 2. S. 23-33.
14. Nedostup A. A., Razhev A. O. Primenenie neyronnoy seti dlya upravleniya tralovym promyslom // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Rybnoe hozyaystvo. 2021. № 1. S. 31-37.
15. Razhev A. O., Nedostup A. A. Razrabotka metodov upravleniya tralovym kompleksom s primeneniem predskazatel'nogo modelirovaniya na neyronnoy seti // Izv. Kaliningr. gos. tehn. un-ta. 2022. № 67. S. 61-70.
16. Nedostup A. A., Al'tshul' B. A., Razhev A. O., Dyatchenko S. V., Bedareva O. M., Bagrova A. A. Matematicheskoe modelirovanie povedencheskih harakteristik stai ryb pri oblove raznoglubinnym tralom // Morskie intellektual'nye tehnologii. 2019. T. 4, № 4 (46). S. 181-185.
17. Nedostup A. A., Razhev A. O. Matematicheskaya model' vzaimodeystviya raspornoy tralovoy doski s vodnoy sredoy // Morskie intellektual'nye tehnologii. 2017. T. 1, № 3 (37). S. 154-157.
18. Nedostup A. A., Razhev A. O. Proizvoditel'nost' sil tralovoy sistemy: postanovka zadachi // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Rybnoe hozyaystvo. 2021. № 2. S. 55-65.
19. Nedostup A. A., Razhev A. O. Modelirovanie orudiy i processov rybolovstva. Chast' I: ucheb. posobie. Kaliningrad: Izd-vo KGTU, 2019. 433 s.
20. Nedostup A. A., Razhev A. O. Modelirovanie orudiy i processov rybolovstva. Chast' II: ucheb. posobie. Kaliningrad: Izd-vo KGTU, 2019. 444 s.
