









Russian Federation
Russian Federation
Russian Federation
from 01.01.2018 to 01.01.2023
Russian Federation
The analysis of modifications of modern noninvasive methods of collecting muscle activity data for controlling robotic prostheses and exoskeletons is carried out. The main focus is on non-invasive control methods based on electromyography (EMG) and electroencephalography, as well as the use of artificial neural networks for signal classification. Key issues are considered, in particular, the presence of low-frequency noise in EMG data, the high computational complexity of neural network training, and the formation of a sufficiently large dataset for neural network training. To eliminate noise, digital filtering and wavelet transform methods are proposed, the use of which eliminates most of the noise, improving the accuracy of gesture recognition by up to 94%. Data storage formats (XDF, WFDB) and existing devices for recording EMG signals, such as hardware and software complexes using SVM and neural networks, are analyzed. An analysis of the existing dataset, which was formed by eight EMG sensors, was carried out, which made it possible to study the structure of EMG signals. The features, target variables, and their maximum and minimum values for the training dataset are defined. The analysis of the muscles of the upper extremities made it possible to conditionally group them into functional groups and select in each group the surface muscles that make the greatest contribution to the movement of the limb, which made it possible to determine the attachment of EMG electrodes. A prototype device based on an Arduino Nano microcontroller, EMG sensors from BiTronics Lab and MPU6050 6DOF sensors designed for synchronous recording of muscle biopotentials and spatial position of limbs has been developed. The device generates a dataset containing bioelectric muscle signals, acceleration, and angular velocities along three axes for each 6DOF sensor. A preliminary training dataset has been formed, which will be processed by the proposed filtering methods and used in the future for the development and training of a neural network.
upper limb prosthesis, lower limb prosthesis, exoskeleton, electromyography, neural network, signal recognition, muscles, control method
Введение
На протяжении всей истории человечества наи-
более губительными травмами являлись те, в результате которых человек теряет одну или несколько конечностей. Такие травмы приводят к частичной или полной утрате трудовых способностей. Для решения данной проблемы придумано множество как вспомогательных устройств, упрощающих взаимодействие с окружающим миром, так и протезов, задача которых – по возможности максимальное возвращение функций утраченной конечности. Помимо проблемы травм вспомогательные устройства помогают обойти ограничения и здорового человеческого тела, увеличивая производительность труда.
Современное развитие технологий и методов в области машинного обучения позволяет решить практически любую проблему классификации, предсказания и генерации данных. Вместе с тем постоянно улучшаются аппаратные средства в области микроэлектроники, такие как цифровые камеры, электромагнитные датчики, микроконтроллеры, сервоприводы, акселерометры и гироскопы. Последний фактор уже несколько десятилетий позволяет создавать роботизированные протезы, которые имеют ряд ограничений по управлению и функциям, применение которых в области машинного обучения может значительно улучшить управление и расширить возможности роботизированных протезов.
В настоящей статье представлены результаты анализа современных методов управления роботизированными протезами верхних и нижних конечностей, а также рассмотрены возникающие препятствия для использования искусственной нейронной сети для управления протезами и возможные способы их решения.
Анализ методов управления протезами конечностей
При утрате верхней конечности на уровне плеча протезирование является затруднительным и подавляющие количество методов управления (МУ) для данного вида протезов являются инвазивными.
В данной же работе будут рассмотрены неинвазивные МУ протезов на уровне кисти и предплечья.
Современные МУ протезами прежде всего подразделяются на следующие виды: миотонический, биоэлектрический и контактный [1]. При биоэлектрическом МУ используется биоэлектрический компонент мышечной активности, при миотоническом – объемное изменение мышц, при контактном – воздействие на элемент управления (переключатель). Также можно использовать вместе два или все три МУ, такой тип МУ называется комбинированным.
Для протезов на уровне предплечья часто применяются нейроинтерфейсы и нейронные сети, а также алгоритмы самообучения, т. к. степень компенсации утраченных способностей для данных протезов выше, чем для протезов на уровне кисти.
Наиболее перспективными МУ протезами верхних конечностей на уровне предплечья на данный момент являются адаптивные МУ, использующие электромиографические (ЭМГ) сигналы как входные для формирования управляющего сигнала протеза, а также ПИД-регуляторы контролирования силы хвата и остальных движений протеза. Также популярным методом является электроэнцефалография (ЭЭГ). Данные, получаемые от обоих способов, практически совпадают и выражаются в виде кривой зависимости силы стимула от времени, однако есть недостаток, связанный с тем, что информация смещена из-за разницы во времени получаемых сигналов [2]. К минусам ЭЭГ можно отнести то, что они сильно зависят от психологического состояния пользователя [3]. Так, можно предположить, что при интенсивном беге с последующей остановкой данные ЭЭГ будут некорректны.
Отдельной категорией является сбор данных с нижних конечностей, т. к. для них необходимо, помимо данных с мышц, собирать данные о положении основной массы тела, которые бы говорили об устойчивости такого положения, с чем помогают гироскопы, т. к. при наклоне туловища происходят определенные перемещения нижних конечностей для поддержания баланса.
Методы управления протезами с использованием искусственных нейронных сетей называются самообучающимися системами и являются достаточно перспективными, позволяя выдавать ответ
о желаемом действии/жесте на основе входных данных за доли секунды [1]. Однако главным недостатком данных систем является высокое искажение выходных сигналов нейронной сети из-за наличия шума во входных данных, а также значительные требования к вычислительной стоимости по времени и памяти для обучения нейронной сети.
Одним из способов устранения шума и подготовки сигналов ЭМГ для использования в качестве входных данных для нейронной сети является фильтрация сигнала по частоте вместе с вейвлет-пре-
образованием, что позволяет значительно повысить точность результатов работы нейронной сети [4]. Еще один способ предобработки сигналов – цифровая фильтрация. Она обеспечивает выделение сигналов в шумах, разделение и их распознавание, а также подавление нежелательных сигналов [5]. Это достигается путем умножения сигнала на значение фильтра. Основная часть ЭМГ-сигналов лежит в диапазоне частот от 15 до 500 Гц, поэтому для устранения части шума можно использовать фильтр низких частот. Также большая часть шумов в данном сигнале представляет собой высокочастотные сигналы от электронных устройств и электродов. Увеличение расстояния между электродами ЭМГ и минимизация проводов будет способствовать уменьшению количества высокочастотных шумов. Вейвлет-преобразо-
вание позволяет перевести сигнал ЭМГ из временного представления в частотно-временное, что приводит к уменьшению размерности сигнала вдвое и устранению низкочастотных шумов [6]. Дополнительно вейвлет-преобразование хорошо локализовано по времени и частоте, что позволяет использовать данный метод для преобразования сигналов за небольшой промежуток времени, около 200 мс. Перечисленные методы устранения шума и преобразования ЭМГ-сигнала достаточны для получения точности классификаций жестов в 94 %.
Таким образом, использование в МУ протезами искусственных нейронных сетей, позволяющих классифицировать входные сигналы от ЭМГ-датчиков для определения желаемого движения/жеста, позволяет достичь высокой скорости и точности работы протезов. Хотя точность результатов нейронной сети в значительной мере зависит от отношения шум/сигнал во входных данных, вышеперечисленные методы позволяют уменьшить отношение шум/сигнал и использовать уже обработанные данные в качестве входных параметров нейронной сети, не искажая результаты ее работы. Но остается проблема высокой вычислительной стоимости по времени и памяти во время обучения искусственной нейронной сети, и вместе с тем возникает проблема формирования обучающего набора данных.
Способ хранения обучающего набора данных
При обучении классических моделей нейронных сетей количество объектов в обучающей выборке должно превосходить количество весов в модели примерно в 10 раз. Следовательно, для обучения нейронной сети, которая будет использоваться в МУ протезами конечностей, необходимо сформировать набор данных, количество объектов в котором будет примерно в 10 раз больше, чем параметров в сети. Для формирования обучающего набора данных (датасет) необходимо рассмотреть способы хранения данных, получаемых с датчиков ЭМГ, определить класс, к которым будет относиться нейронная сеть, после чего подготовить датасет для последующего обучения.
Одним из форматов хранения данных ЭМГ является расширяемый формат данных (XDF). Это формат общего назначения для данных многоканальных временных рядов с обширной связанной метаинформацией [7]. Данный файл может содержать множество потоков данных, что удобно для получения данных с отдельных датчиков. Помимо этого, существует api для работы с данным форматом
в языке программирования Python, что облегчит обработку датасета для нейросети. Проблем с хранением данных гироскопов не будет, т. к. формат предполагает хранение столбчатых данных.
Также для работы с данными, полученными с ЭМГ, можно использовать иные форматы, например Biopac – формат файла AcqKnowledge (ACQ), однако работать с ним можно только на языке программирования C++. Так как C++ мало распространен для работы с нейросетями, данный вариант не подходит для последующего обучения выборки. Одним из рекомендуемых форматов является Physionet (WFDB), предназначенный для записи небольших объемов данных, в том числе и данных, получаемых с ЭМГ, его также можно использовать в Python.
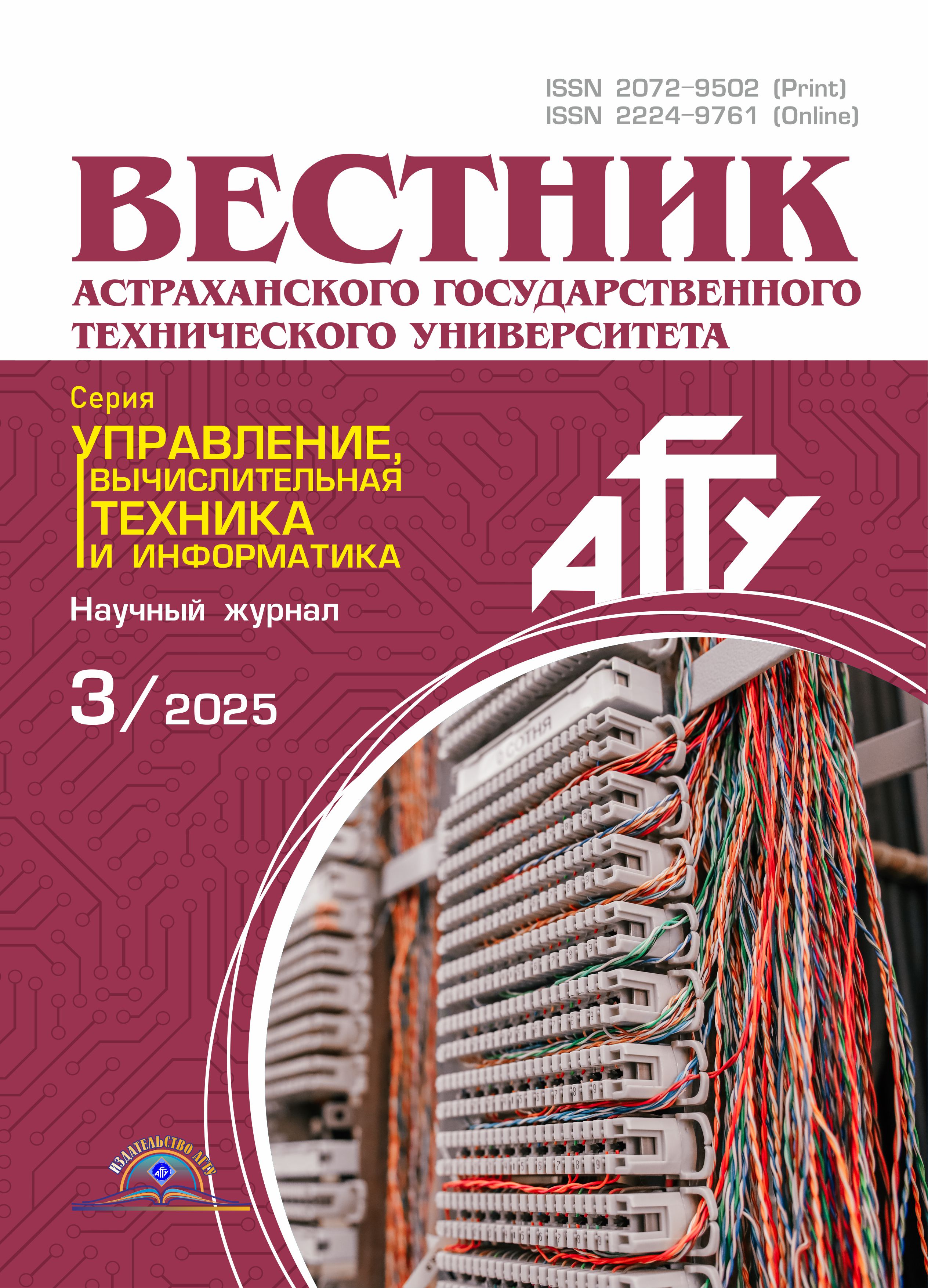
В качестве примера рассмотрим датасет необработанных данных с 8 датчиков ЭМГ, расположенных на предплечье, ближе к локтевому суставу [8]. Необработанные данные – это значения электрических сигналов с ЭМГ-датчиков, содержащие шум. Данные в этом датасете уже размечены на 8 категорий: неразмеченные данные, рука в состоянии покоя, рука сжата в кулак, сгибание запястья, разгибание запястья, лучевое отведение, локтевое отведение, ладонь вытянута. Так как в датасете представлены данные ЭМГ-датчиков для 36 испытуемых, то выберем первого и изобразим данные для первых 4-х каналов с выделением во времени жестов, которые делает испытуемый, на графике (рис. 1).

Рис. 1. Первые 4 канала для первого испытуемого
Fig. 1. The first 4 channels for the first subject
На рис. 1 выделены области, которые отвечают за тип жеста и включают следующую последовательность: рука в состоянии покоя, рука сжата в кулак, сгибания запястья, разгибание запястья, лучевое отведение, локтевое отведение, – данные действия повторяются дважды. Данный график позволяет увидеть форму ЭМГ-сигнала.
Теперь представим на графике изменение ЭМГ-сигнала для первого канала незадолго до, во время и после того, как первый испытуемый делает жест: сжатие руки в кулак. Данный график представлен на рис. 2.
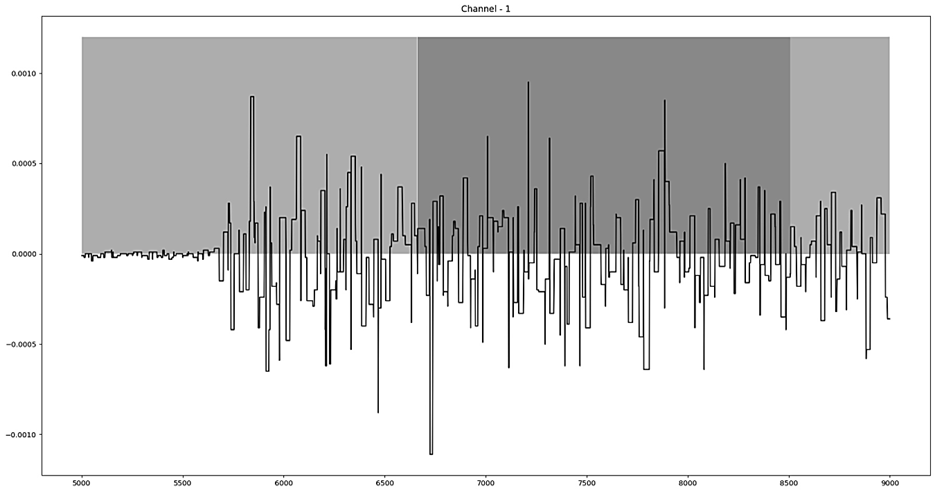
Рис. 2. Изменения ЭМГ-сигнала во время сжатия руки в кулак
Fig. 2. Changes in the EMG signal during hand clenching
Незадолго до того как рука полностью сожмется в кулак, амплитуда сигнала начинает увеличиваться (см. рис. 2). Из-за этого определить визуально, когда именно начался жест, становится сложнее. Даже во время покоя ЭМГ-сигнал не остается постоянным, а меняется хаотичным образом во времени из-за присутствия шума от других электрических источников и сопротивления тканей кожи и других мышц.
Для подготовки данных к обучению нейронной сети можно использовать синхронное вейвлет-преобразование вместе с подбором порога в целях устранения шума [9]. Данный способ позволяет достаточно точно отделить шум от полезного ЭМГ-сигнала.
Обзор существующих устройств для регистрации ЭМГ-сигналов
После изучения МУ протезами и способов получения и хранения ЭМГ-сигналов проведем поиск и анализ существующих устройств, которые регистрируют ЭМГ-сигналы. Одним из существующих решений является аппаратно-программный комплекс, собирающий и транслирующий на вычислительный сервер ЭМГ-сигналы [10]. Данное решение использует два ЭМГ-датчика от компании BiTronics Lab. В режиме реального времени регистрируемые ЭМГ-сигналы передаются на вычислительный сервер, где они подвергаются обработке. На основе этих данных, используя метод опорных векторов (SVM) и нейронные сети, система распознает жесты, которые выполняет пользователь.
Существует также устройство классификации жестов запястья на основе методов нечеткой логики и сигналов ЭМГ [11]. В этом устройстве для получения ЭМГ-сигналов используются 3 датчика, расположенные на разгибателе пальцев, локтевом разгибателе запястья и поверхностном сгибателе пальцев. Регистрируемые данные отправляются на ПК для предварительной обработки и распознавания жеста на основе нечеткой логики. Выходными параметрами классификатора являются следующие нечеткие значения: нейтральное положение, разгибание, сгибание и супинация запястья. По представленным в статье результатам точность классификатора составляет 94,44 %.
Представленные существующие решения показывают отличные результаты классификации жестов верхних конечностей на основе ЭМГ-сигналов. Однако оба решения используют выделенный вычислительный сервер не только для обработки и обучения классификаторов, но и для определения жестов в реальном времени, что требует подключения устройства к вычислительному серверу. Данное решение хорошо подходит для дистанционного управления устройствами, однако создает задержку во времени, что является критическим фактором при управлении протезами. Поэтому для управления протезами предлагается использовать встроенный в протез вычислительный блок, способный локально запускать обученную нейронную сеть для классификации жестов в реальном времени.
Также в представленных решениях данные целевых переменных формируются вручную на основе нормализованных данных. Данный подход является трудозатратным и может содержать ошибки, т. к. составляется вручную. Поэтому для формирования набора данных целевых переменных предлагается регистрировать положение конечности в пространстве. Такие данные позволят сформировать цельный датасет, содержащий как ЭМГ-сигналы мышц, так и соответствующее положение конечности в пространстве. Предполагается, что собранный таким образом датасет позволит обучить нейронную сеть, которая будет способна достаточно точно определять жест и положение конечности в пространстве на основе ЭМГ-сигналов.
Проектирование устройства для регистрации ЭМГ-сигналов и положения верхних конечностей
Определим структуру обучающей выборки, а именно признаки объектов, метки и целевые переменные, т. к. обучение нейронной сети будет происходить при помощи метода обучения с учителем.
В качестве целевой переменной будет выступать желаемое положение предплечья и жеста кисти. Положение предплечья определяется двумя параметрами: сгиб в локтевом суставе и его ротация. Параметры, определяющие жест кисти, можно разбить на 2 группы: определяющие положение кисти и определяющие положения фаланг пальцев. К первой группе относится качание кисти по двум осям: вдоль предплечья и поперек предплечья. Ко второй группе для простоты моделирования и обучения нейронной сети будет относиться степень сжатия каждой фаланги в отдельности [12]. Таким образом, в качестве целевых переменных и, соответственно, меток в обучающей выборке будут выступать параметры, указанные в табл. 1.
Таблица 1
Table 1
Целевые переменные нейронной сети
Neural network target variables
|
Обозначение |
Ограничение значения |
Название целевой переменной |
|
y1 |
0 ≤ y1 ≤ 110º |
Сгиб в локтевом суставе |
|
y2 |
|
Ротация предплечья |
|
y3 |
|
Качение кисти поперек предплечья |
|
y4 |
|
Качение кисти вдоль предплечья |
|
y5 |
|
Степень сжатия большого пальца |
|
y6 |
|
Ротация большого пальца поперек кисти |
|
y7 |
|
Ротация большого пальца вдоль кисти |
|
y8 |
|
Степень сжатия указательного пальца |
|
y9 |
|
Ротация указательного пальца вдоль кисти |
|
y10 |
|
Ротация указательного пальца поперек кисти |
|
y11 |
|
Степень сжатия среднего пальца |
|
y12 |
|
Ротация среднего пальца вдоль кисти |
|
y13 |
|
Ротация среднего пальца поперек кисти |
|
y14 |
|
Степень сжатия безымянного пальца |
|
y15 |
|
Ротация безымянного пальца вдоль кисти |
|
y16 |
|
Ротация безымянного пальца поперек кисти |
|
y17 |
|
Степень сжатия мизинца |
|
y18 |
|
Ротация мизинца вдоль кисти |
|
y19 |
|
Ротация мизинца поперек кисти |
Теперь определим признаки объектов в обучающей выборке. Как упоминалось выше, в данной статье рассматриваются протезы верхних конечностей не выше локтевого сустава и МУ на основе ЭМГ-сигналов. Для протезов предплечья и кистив качестве признаков будем использовать положения в пространстве плеча, а также сигналы с пары электродов, расположенных у оснований мышц протагониста и антагониста плеча, и один компенсационный электрод. Для протезов части предплечья и кисти будут использоваться те же признаки, что и для протезов предплечья, вместе с сигналами электродов, расположенных у основания мышц протагониста и антагониста предплечья.
Расположение и количество электродов для получения ЭМГ-сигналов обусловлено целевыми переменными и наиболее эффективным расположением электродов на мышцах. Для измерения биопотенциалов мышц при помощи ЭМГ-электродов необходимо использовать как минимум 3 электрода: 1 компенсационный и 2, расположенные у основания исследуемой мышцы [13]. Так как в качестве целевых переменных, относящихся к предплечью, выступают сгиб в локтевом суставе и ротация, нужно фиксировать биопотенциал мышц, выполняющих функцию сгиба в локтевом суставе, и ротацию предплечья. В качестве таких мышц будут выступать двуглавая и трехглавая мышцы плеча. Первая отвечает как за сгиб в локтевом суставе, так и за ротацию предплечья, а вторая отвечает за разгибание в локтевом суставе [14].
При изменении положения кисти и пальцев задействуется гораздо больше мышц, но т. к. будет использоваться поверхностный ЭМГ, целесообразнее рассмотреть только поверхностные мышцы предплечья. В табл. 2 представлен список мышц предплечья и плеча, отвечающих за выполнение исследуемых параметров.
Таблица 2
Table 2
Разбиение мышц по функциональным группам
Breakdown of muscles by functional groups
|
Исследуемый параметр |
Название мышц |
|
Сгибание предплечья |
Двуглавая мышца плеча; плечевая мышца; плечелучевая мышца; круглый |
|
Разгибание предплечья |
Трехглавая мышца плеча; локтевая мышца |
|
Супинация предплечья |
Плечелучевая мышца; длинная мышца, отводящая большой палец кисти; |
|
Пронация предплечья |
Плечевая мышца; круглый пронатор; лучевой сгибатель запястья |
|
Приведение, отведение, |
Лучевой сгибатель запястья; локтевой сгибатель запястья; длинный лучевой |
|
Движение пальцев кисти |
Поверхностный сгибатель пальцев; разгибатель пальцев; разгибатель мизинца; длинная мышца, отводящая большой палец кисти; короткий разгибатель |
Фиксировать ЭМГ-сигнал для каждой указанной мышцы при помощи поверхностных электродовне представляется возможным из-за размеров электродов, количества мышц и помех, создаваемых близким расположением электродов друг к другу. Поэтому предлагается позиционировать электроды либо на брюшке крупных мышц, либо на геометрическом центре группы мышц, достаточно близких друг к другу. Всего таких точек крепления электродов 7 и еще две точки на локтевом отростке и у лучезапястного сустава на внутренней стороне предплечья для референсных электродов. Пары датчиков ЭМГ располагаются на брюшках следующих мышц: трехглавая мышца плеча, двуглавая мышца плеча, плечелучевая мышца, круглый пронатор, лучевой сгибатель запястья, длинная ладонная мышца, локтевой сгибатель запястья, длинный и короткий лучевые разгибатели запястья, разгибатель пальцев, локтевой разгибатель запястья и разгибатель мизинца. Такое расположение точек крепления электродов хорошо делится на 2 группы: электроды, находящиеся на плече, и электроды, находящиеся на предплечье, – это позволяет независимо друг от друга менять количество электродов в каждой группе. Однако максимальное количество электродов в группе ограничено размерами пары электродов, количеством аналоговых входов на регистрирующей плате и площадью брюшка мышцы.
Для формирования обучающей выборки необходимо регистрировать как указанные выше признаки, так и метки, соответствующие целевым параметрам, т. е. положение верхних конечностей. Распространенным способом фиксирования положения конечностей являются системы видеоанализа движений человека [15]. Однако данный подход имеет ряд ограничений. Во-первых, фиксация положения конечностей происходит в отдельном помещении, где установлены видеокамеры. Во-вторых, во избежание перекрытия предметами частей тела, для которых происходит фиксация положения, необходимо установить достаточно большое количество видеокамер по всему периметру помещения. В-третьих, сложность фиксирования положения пальцев. Данные ограничения сильно повышают финансовую и вычислительную стоимость обучения нейронной сети, поэтому данный способ является менее предпочтительным для фиксирования положения верхних конечностей.
Определять положение верхних конечностей можно при помощи экзоскелета с установленными магнитными энкодерами [16]. Однако данная конструкция имеет жесткий каркас, что сковывает движения оператора. Для определения положения верхних конечностей предлагается использовать 6DOF-датчики акселерометра и гироскопа, позволяющие определить относительное положение точки в пространстве и ее углы наклона. Данные датчики будут располагаться на плече, ближе к плечевому суставу, на тыльной стороне предплечья, рядом с лучезапястным суставом, на III и IV пястных костях кисти и на теле дистальных фаланг пальцев кисти. Такое расположение датчиков позволяет фиксировать требуемые параметры положения верхних конечностей. При помощи данных с датчика на предплечье можно определить угол ротации предплечья. При помощи данных с пары датчиков на плече и предплечье можно определить угол сгиба в локтевом суставе. При помощи данных с датчика на кисти можно определить углы движения кисти вдоль и поперек предплечья, а при помощи данных с датчиков на дистальных фалангах пальцев кисти можно определить их положение в пространстве [17].
Результаты использования разработанного прототипа устройства регистрации данных
Согласно описанным выше критериям был собран прототип с одним ЭМГ-датчиком и двумя 6DOF-датчиками. Электроды для регистрации разности биопотенциалов располагаются на брюшке плечелучевой мышцы, а референсный электрод располагается на внутренней стороне предплечья у лучезапястного сустава. Датчики 6DOF располагаются на тыльных сторонах предплечья и кисти, возле лучезапястного сустава. Собранный прототип представлен на рис. 3.
Представленное устройство состоит из 4-х компонентов: микроконтроллер, ЭМГ-датчик, 6DOF-датчики и micro SD Shield. В качестве микроконтроллера используется Arduino Nano, в качестве ЭМГ-датчиков используются датчики от BiTronics, для регистрации углов Эйлера используются датчики MPU 6050. Взаимодействие между Arduino Nano и MPU 6050 осуществляется по протоколу I2C. Взаимодействие Arduino Nano и micro SD Shield осуществляется по протоколу SPI. Все датчики располагаются на эластичном рукаве.
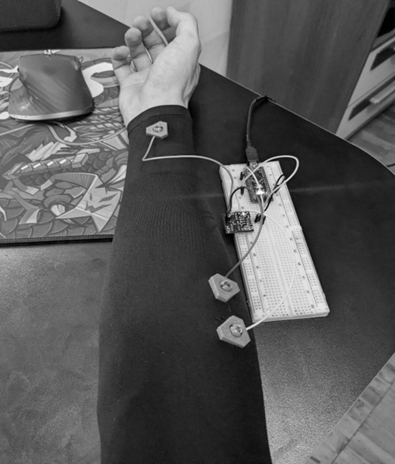
Рис. 3. Собранный прототип устройства
Fig. 3. Assembled prototype of the device
На рис. 4 представлены компоненты электрической схемы устройства.
Рис. 4. Схема разработанного устройства
Fig. 4. Diagram of the developed device
Собранный прототип устройства регистрирует и сохраняет данные на microSD card в следующем формате:
– time – временная метка, миллисекунды, прошедшие со старта микроконтроллера;
– emg1 – значение биоэлектрического сигнала с ЭМГ-датчика;
– ax1, ay1, az1 – значения линейного ускорения первого датчика вдоль осей;
– gx1, gy1, gz1 – значения угловых ускорений первого датчика вдоль осей.
На рис. 5 представлены данные, собранные за первые несколько секунд работы разработанного прототипа.
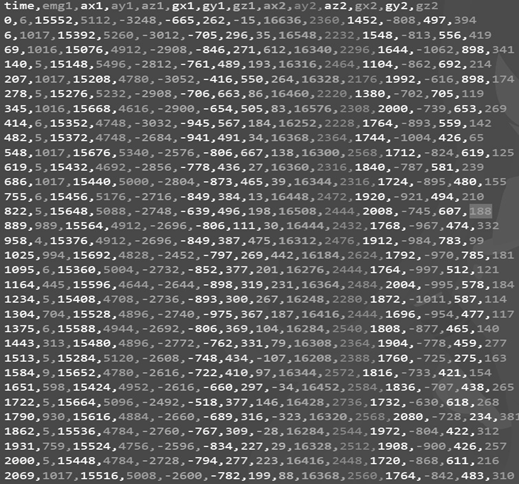
Рис. 5. Данные, собранные прототипом
Fig. 5. Data collected by the prototype
Таким образом, устройство позволяет получать данные о работе мышц руки, в зависимости от действия пользователя.
Заключение
На основе анализа методов управления роботизированными протезами верхних и нижних конечностей был определен метод управления (МУ), который будет использоваться как основной в дальнейших исследованиях. При анализе МУ было уделено особое внимание применению искусственных нейронных сетей для управления протезами, которые позволяют добиться высокой скорости и точности работы. Были выявлены методы устранения шума из сигналов ЭМГ, включая фильтрацию по частоте и вейвлет-преобразование, что позволит в дальнейшем получить высокую точность классификации жестов. Разработана структура обучающей выборки и выбраны оптимальные форматы хранения данных. В результате был создан прототип устройства для регистрации ЭМГ-сигналов и положения верхних конечностей, который успешно позволил собрать датасет для дальнейшего проведения исследований. Полученные результаты демонстрируют возможность создания эффективных систем управления протезами на основе искусственных нейронных сетей и ЭМГ-сигналов.
1. Gorokhova N. M., Golovin M. A., Chezhin M. S. Metody upravleniia protezami verkhnikh konechnostei [Management methods for upper limb prostheses]. Nauchno-tekhnicheskii vestnik informatsionnykh tekhnologii, mekhaniki i optiki, 2019, vol. 19, no. 2, pp. 314-325.
2. Xiaodong Zhang, Hanzhe Li, Zhufeng Lu, Gui Yin. Homology Characteristics of EEG and EMG for Lower Limb Voluntary Movement Intention. Frontiers in Neurorobotics, 2021, vol. 15. Available at: https://www.frontiersin.org/articles/10.3389/fnbot.2021.642607/full?__ya_mt_enable_static_translations=1#B32 (accessed: 20.12.2024).
3. Rustamova T. V. Vliianie ekzamenatsionnogo stressa na amplitudu voln EEG v temennoi dole golovnogo mozga u studentov fakul'teta biologii-khimii s razlichnymi individual'no-tipologicheskimi osobennostiami [The effect of exam stress on the amplitude of EEG waves in the parietal lobe of the brain in students of the Faculty of Biology and Chemistry with various individual typological features]. Siberian Journal of Life Sciences and Agriculture, 2020, no. 5. Available at: https://cyberleninka.ru/article/n/vliyanie-ekzamenatsionnogo-stressa-na-amplitudu-voln-eeg-v-temennoy-dole-golovnogo-mozga-u-studentov-fakulteta-biologii-himii-s (accessed: 20.12.2024).
4. Zimenko K. A., Borgul' A. S., Margun A. A. Analiz i obrabotka signalov elektromiogrammy [Electromyogram signal analysis and processing]. Nauchno-tekhnicheskii vestnik informatsionnykh tekhnologii, mekhaniki i optiki, 2013, vol. 13, no. 1, pp. 41-43.
5. Lebedev V. V. Tsifrovaia fil'tratsiia v meditsinskikh priborakh pri ogranichennoi razmernosti srabatyvaniia fil'tra [Digital filtration in medical devices with a limited filter response dimension]. T-Comm, 2012, no. 3. Available at: https://cyberleninka.ru/article/n/tsifrovaya-filtratsiya-v-meditsinnskih-priborah-pri-ogranichennoy-razmernosti-otklika-filtra (accessed: 22.12.2024).
6. Pigal' A. S., Pigal' P. B. Primenenie veivlet-preobrazovaniia dlia analiza kardiosignalov: predvaritel'nye rezul'taty issledovaniia [Application of the wavelet transform for the analysis of cardiac signals: preliminary results of the study]. Zdorov'e dlia vsekh, 2014, no. 1. Available at: https://cyberleninka.ru/article/n/primenenie-veyvlet-preobrazovaniya-dlya-analiza-kardiosignalov-predvaritelnye-rezultaty-issledovaniya (accessed: 22.12.2024).
7. Kublanov V. S. Biomeditsinskie signaly i izobrazhe-iia v tsifrovom zdravookhranenii: khranenie, obrabotka i analiz: uchebnoe posobie [Biomedical signals and images in digital healthcare: Storage, processing and analysis: a textbook]. Ekaterinburg, Izd-vo Ural's. un-ta, 2020. 239 p.
8. EMG Signal for gesture recognition. kaggle. Availa-ble at: https://www.kaggle.com/datasets/sojanprajapati/emg-signal-for-gesture-recognition/data (accessed: 22.12.2024).
9. Chuanjiang Li, Huiyin Deng, Shiyi Yin, Chenming Wang, Yanfei Zhu. sEMG signal filtering study using syn-chrozqueezing wavelet transform with differential evolution optimized threshold. Results in Engineering, 2023, vol. 18 (12), p. 101150.
10. Kovalev Iu. S., Berezhnoi D. S., Sakhno S. V., Bergaliev T. K., Kiseleva M. A. Integral'naia sistema dlia obrabotki biosignalov na osnove algoritmov II i perspektivy ee primeneniia [Integrated system for biosignal processing based on AI algorithms and prospects for its application]. Intellektual'nye sistemy. Teoriia i prilozheniia, 2022, vol. 26, iss. 1, pp. 229-235.
11. Gavrilov A. I., So So Tav U. Bioinformatsionnaia sistema s klassifikatorom dvizhenii luchezapiastnogo sustava na osnove nechetkoi logiki [Bioinformatic system with wrist joint motion classifier based on fuzzy logic]. Vestnik MGTU im. N. E. Baumana. Seriia: Priborostroenie, 2016, no. 6, pp. 71-84.
12. Petrenko V. I., Tebueva F. B., Gurchinskii M. M., Riabtsev S. S. Razrabotka struktury ekzoskeleta verkhnikh konechnostei dlia registratsii dvizhenii operatora pri ko-piruiushchem upravlenii [Development of the upper limb exoskeleton structure for recording operator movements during copy control]. Informatsionnye tekhnologii intel-lektual'noi podderzhki priniatiia reshenii, 2019, vol. 1, pp. 189-196.
13. Riabchevskii V. O., Nikonova G. V. Interfeis pro-grammno-apparatnogo modulia bionicheskogo manipuliatora [Interface of the bionic manipulator software and hardware module]. Informatsionnye tekhnologii i avtomatizatsiia upravleniia. Otvetstvennyi redaktor A. V. Nikonov. Omsk, 2022. Pp. 236-247.
14. Samusev R. P., Sentiabrev N. N. Atlas anatomii i fiziologii cheloveka: uchebnoe posobie [Atlas of Human Anatomy and Physiology: a textbook]. Moscow, AST; Mir i obrazovanie Publ., 2023. Pp. 165-170.
15. Gurin I. V. Sistemy videoanaliza dvizhenii cheloveka [Video analysis systems for human movements]. A POSTERIORI. Rostov-on-Don, 2022. No. 2. Pp. 120-122.
16. Sitnikov A. A., Levitskii A. A. Razrabotka ustroistva dlia kontrolia polozheniia i elektrostimuliatsii verkhnei konechnosti cheloveka [Development of a device for position control and electrical stimulation of the human upper limb]. Sovremennye problemy radioelektroniki. Krasnoiarsk, 2022. Pp. 422-427.
17. HAND AND FINGER TRACKERS. Polhemus. Innovation in motion. Available at: https://polhemus.com/motion-tracking/hand-and-finger-trackers/ (accessed: 20.12.2024).
