












Россия
Россия
Россия
Россия
Россия
Россия
Приведен пример использования объектно-ориентированной модели пропульсивной системы, применимой для различных судов. Объектно-ориентированный подход к моделированию дает возможность провести количественный и качественный анализ использования электроэнергетической системы судна. Проведен анализ различных вариантов построения судовой электроэнергетической системы судна на примере существующих отечественных промышленных разработок. Применен системный подход к классификации элементов и структурных единиц: первичных двигателей, преобразователей электроэнергии, распределительных элементов, электродвигателей, движителей в качестве основных потребителей. Электроэнергетическая система судна разделена на три иерархических уровня. Каждый уровень представлен классом моделей, при этом определены связи и сигналы между уровнями моделирования. Проведена оценка динамической картины состояния судовой электроэнергетической системы при воспроизведении сценариев – маневра судна, пуска-отключения двигателей, включения-выключения нагрузки. Показан характер переходных процессов в системе управления «первичный двигатель – генератор»: изменение механических величин и сигналов в системе управления электроэнергией. Моделирование учитывает также взаимное электромагнитное влияние элементов друг на друга. Определен характер переходного процесса асинхронного электродвигателя подруливающего устройства при совершении судном маневра. Приведенная модель позволяет оценить диапазон значений при переходных процессах в судовой электроэнергетической системе. Рассчитанные значения могут быть использованы в судовых системах управления и защиты. Показана возможность осуществления комплексного подхода к модульному и уровневому моделированию системы: моделирование динамики возмущений, элементов системы и автоматизации управления. Также с помощью комплексного подхода может быть реализована удаленная модельная лаборатория судовой электроэнергетической системы
комплексная модель, математическая модель, объектно-ориентированное моделирование, пропульсивная система, судовая система
Введение
В состав пропульсивных систем обычно входят различные элементы, которые можно классифицировать в зависимости от уровня моделирования: микро-, макро- и мегауровень [1]. Качество электрической энергии является производной от весьма большого количества процессов и элементов системы [2, 3]. В данной статье идет речь о моделях различной физической природы: электромагнитных процессах, преобразованиях тока и напряжения, потере энергии, механических процессах гребного винта и электродвигателя.
Материалы исследования
Рассмотрим модели управления судовыми генераторами и главными двигателями. На рис. 1 приведена уровневая модель судовой системы. На третьем, нижнем уровне располагаются механические модели нагрузок на гребной винт и подруливающие устройства. На второй уровень вынесены модели преобразователей электроэнергии (выпрямителей, электродвигателей постоянного и переменного тока, судовая сеть). На первом уровне показаны модели управления генератором и главным двигателем. Модели могут быть классифицированы также как модели с распределенными и сосредоточенными параметрами.

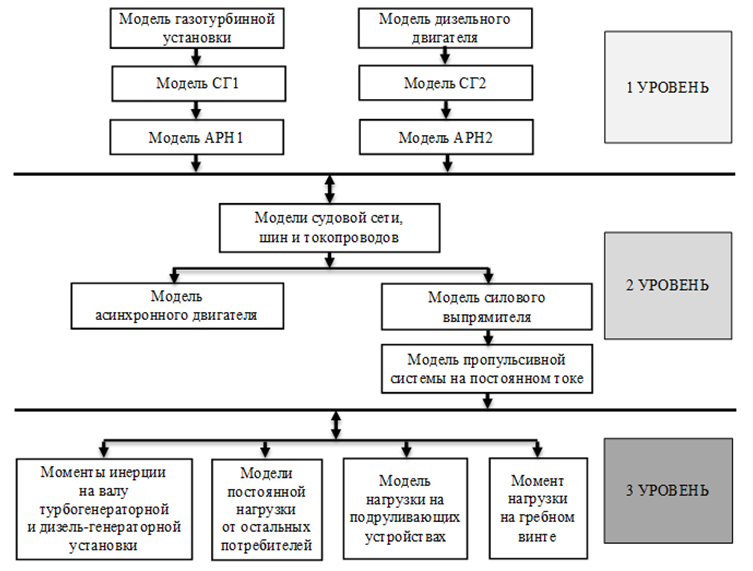
Рис. 1. Комплексная модель пропульсивной электроэнергетической системы судна:
СГ – синхронный генератор; АРН – автоматический регулятор напряжения
Fig. 1. Integrated model of propulsion electric power system of the vessel:
СГ (SG) – synchronous generator; АРН (AVR) – automatic voltage regulator
Целью данной работы является комплексное моделирование и исследование динамики судовой электрической сети.
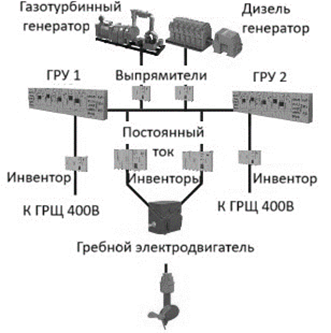
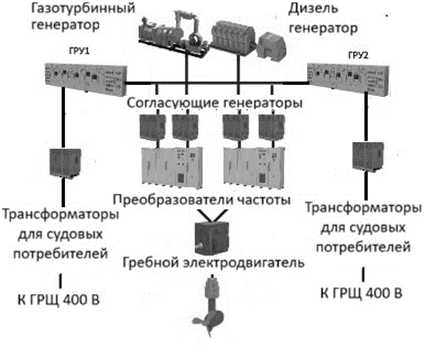
В общем виде структуры судовых пропульсивных систем могут быть представлены в виде набора модулей и вариантов построения схем электродвижения. Современные ведущие судопроизводители [4] предлагают различные варианты построения пропульсивных систем. Системы могут быть переменно-постоянными, переменного тока, постоянного тока, с активными преобразователями электроэнергии (выпрямители, инверторы), с реакторно-трансформаторным оборудованием. Так, к примеру, на рис. 2 приведены различные варианты структуры пропульсивной системы, реализуемые научно-произ-водственным центром «Судовые электротехнические системы» [4].
На рис. 2, а приведена система переменно-постоянно-переменного тока. В систему входят выпрямители, инверторы, главные двигатели, генераторы, гребной двигатель и система управления и защиты. Схемные решения на шинах постоянного тока обладают повышенной отказоустойчивостью, отсутствием трансформаторов, широким диапазоном регулируемого напряжения.
Пропульсивная система на рис. 2, б с активными преобразователями частоты и аккумуляторными элементами оптимальна для низковольтных систем и экологична. Приведенная на рис. 2, в система с использованием реакторно-трансформа-торного оборудования обладает высокой надежностью и широким диапазоном мощностей, однако снабжена согласующими трансформаторами, которые обеспечивают согласование напряжения электростанции с напряжением питания преобразователя частоты.
а б

в
Рис. 2. Варианты структуры пропульсивной системы [4]: а – система переменно-постоянно-переменного тока;
б – система электродвижения с активными преобразователями частоты;
в – система электродвижения с согласующими трансформаторами
Fig. 2. Variants of the structure of the propulsion system [4]: а – alternating-constant-alternating current system;
б – electric propulsion system with active frequency converters;
в – electric propulsion system with matching transformers
Моделирование такого рода судовых структур позволяет систематизировать знания, решать проектировочные задачи, создавать цифрового двойника судна [1, 5]. Все элементы судовой сети могут быть классифицированы, отнесены к уровням, и в системе могут быть заданы возмущающие воздействия различной физической природы. Одним из примеров возможной структуры пропульсивной системы является система питания главного судна с гребным двигателем на постоянном токе и подруливающими устройствами на асинхронных машинах (рис. 3). Ниже представлены результаты исследования в пакете MatLab объектно-ориенти-рованной модели процесса эксплуатации судовой электроэнергетической системы c электродвижением. Рассмотренные выше элементы судовой электроэнергетической системы могу быть промоделированы элементами библиотеки MatLab Simulink. Исследуемая в данной работе сложная модель системы электродвижения судна показывает значительные возможности моделирования переходных процессов.
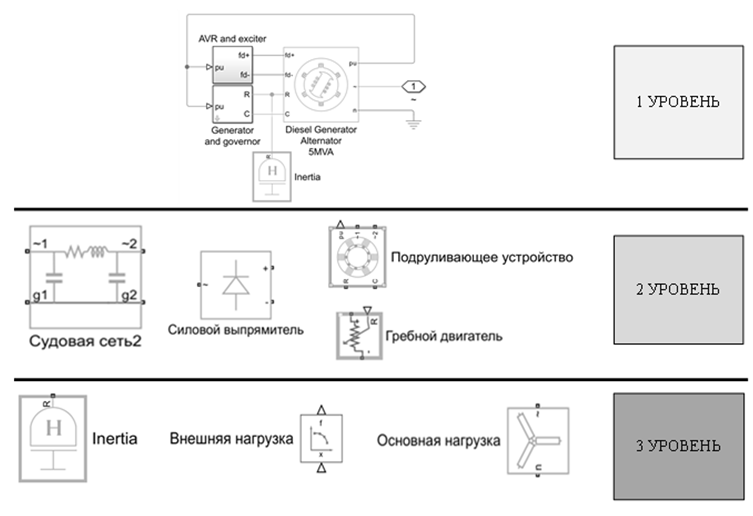
Рис. 3. Вариант набора элементных моделей для объектной уровневой модели
Fig. 3. Variant of a set of element models for object-level
С помощью элементов, представленных на рис. 3, можно описать значительное количество вариантов построения системы [5].
Модель (рис. 4) содержит основные элементы: газотурбинную установку, дизельный двигатель, генераторы, базовую нагрузку, подключаемую нагрузку, силовой выпрямитель, носовые подруливающие устройства с короткозамкнутыми роторами, систему электродвижения на постоянном токе. К характеристикам представленных элементов модели системы относятся мощность газотурбинной установки (30 МВА), мощность дизельного генератора (5 МВА), мощность базовой нагрузки (11,5 МВА), мощность подключаемой нагрузки (6 МВА), мощность силового выпрямителя (со средним значением 20 МВА) [6].
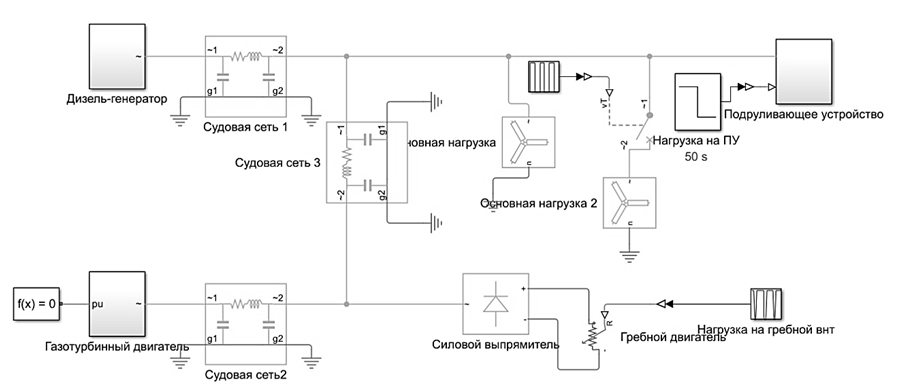
Рис. 4. Объектно-ориентированная модель пропульсивной системы судна
Fig. 4. Object-oriented model of the ship's propulsion system
Результаты и обсуждение
Ниже представлены результаты моделирования динамики пропульсивной системы. Моделирование возмущений (изменение момента на подруливающих устройствах) в системе задавалось по следующей схеме: вначале подключаемая нагрузка отключена; на 20-й секунде увеличивается момент в системе электродвижения; на 30-й секунде – «полный вперед»; на 40-й секунде обороты двигателя снижаются; на 50-й секунде происходит запуск носовых подруливающих устройств; на 60-й секунде подключается дополнительная нагрузка.
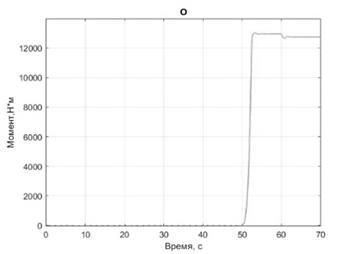
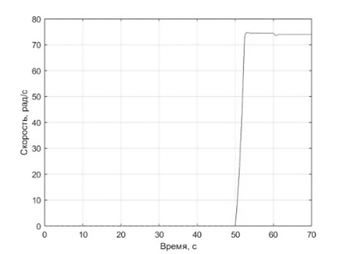
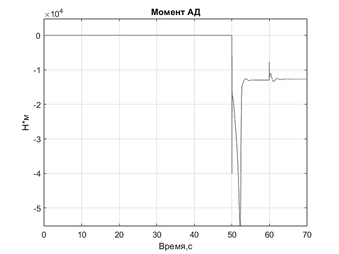
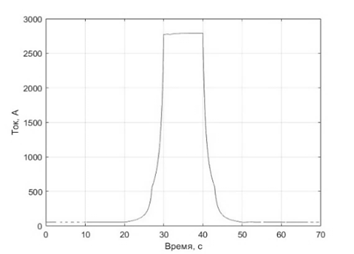
Уровень 3. Согласно предложенному уровневому подходу (см. рис. 1) и набору моделей (см. рис. 3) на нижнем уровне (уровень 3) моделируются моменты внешних сил на валу движителей и нагрузки остальных потребителей. Сюда же можно отнести модели механических величин. На рис. 5 показаны задаваемые характеристики «момент – скорость» подруливающего устройства, момент на валу асинхронного двигателя и ток выпрямителя. На рис. 6 представлен переходный процесс изменения напряжения асинхронного двигателя при включении.
а б
в г
Рис. 5. Результаты моделирования: а, б – заданные характеристики подруливающих устройств;
в – момент на валу асинхронного двигателя; г – ток выпрямителя
Fig. 5. Modeling results: а, б – specified characteristics of the steering devices;
в – torque on the shaft of the asynchronous motor; г – rectifier current
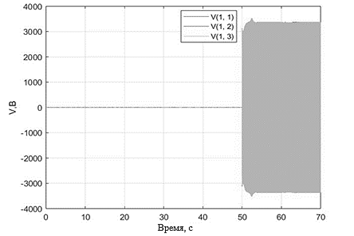
Рис. 6. Напряжение асинхронного двигателя
Fig. 6. Asynchronous motor voltage
На рис. 7, а приведена характеристика инерции на валу газотурбинной установки, а на рис. 7, б – на валу дизельного двигателя. Отметим, что переходный процесс на дизеле длится немного дольше и характеризуется большей колебательностью, при этом скорость вращения генераторов одинакова. Модель инерции первичных двигателей содержит элементы демпфирования с коэффициентом 0,1. Таким образом, на рис. 7 показаны моменты, вычисляемые в зависимости от заданных и изменяющихся параметров в модельном блоке «Инерция»: инерции, полной номинальной мощности, электрической частоты количества пар полюсов и заданного коэффициента демпфирования и углового ускорения.
а б
Рис. 7. Результаты моделирования: а – момента на валу турбины; б – момента на валу дизельного двигателя
Fig. 7. Modeling results: a – turbine shaft torque; б – diesel engine shaft torque
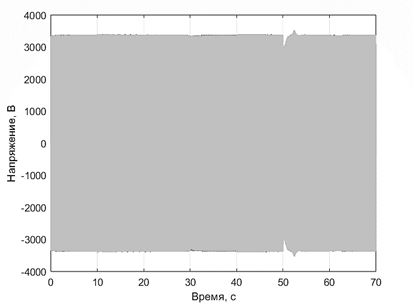
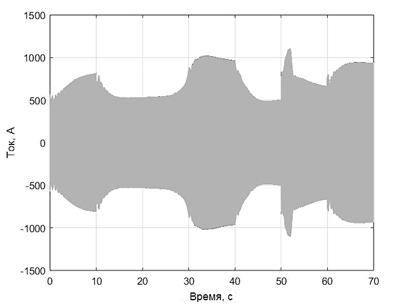
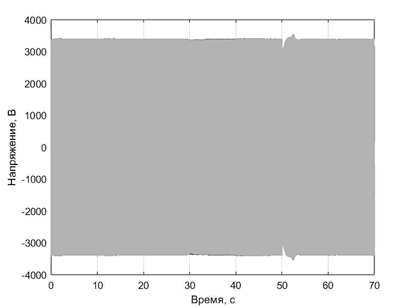
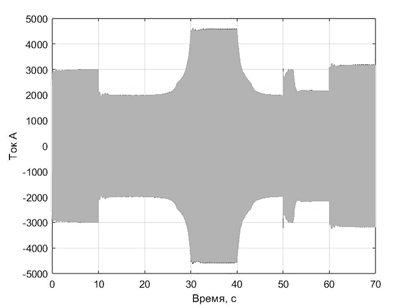
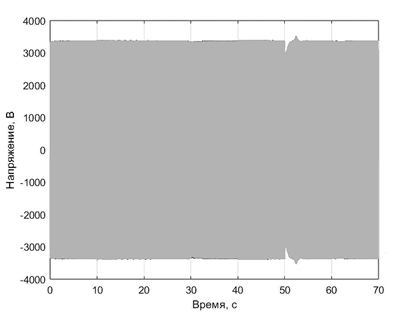
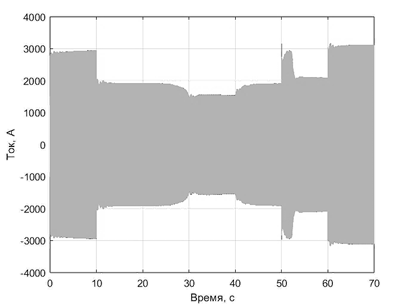
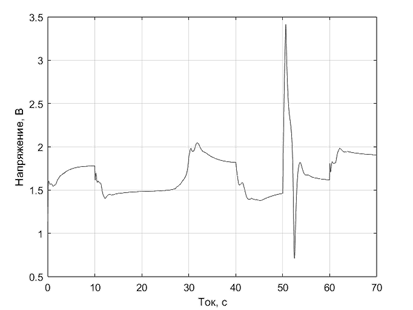
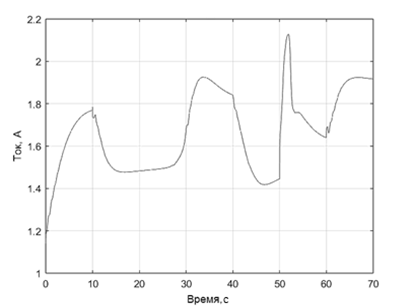
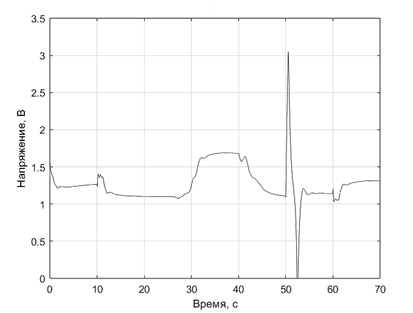
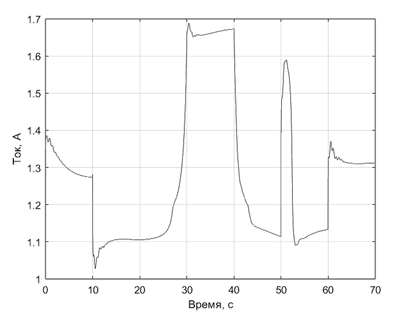
Уровень 2. На этом уровне моделируется сопротивление фаз, самоиндукция фаз, взаимная индуктивность и емкость судовой сети, емкость шин. Также сюда отнесены модели асинхронных электродвигателей подруливающих устройств и модели силового выпрямителя. На рис. 8–10 приведены изменения токов и напряжений в судовой сети, при этом учитываются параметры протяженности судовой сети переменного тока, явлений взаимоиндукции и потерь. Включение гребного двигателя постоянного тока на 30-й секунде и подруливающих устройств на 50-й секунде вызывает броски тока и напряжения, а с включением основных потребителей судовая сеть выходит на номинальный режим.
а б
Рис. 8. Результаты моделирования: а – изменение напряжения на элементе «Судовая сеть 1»;
б – изменение тока на элементе «Судовая сеть 1»
Fig. 8. Modeling results: a – change of voltage on the element “Ship network 1”;
б – current on the element “Ship network 1”
а б
Рис. 9. Результаты моделирования: а – изменение напряжения на элементе «Судовая сеть 2»;
б – изменение тока на элементе «Судовая сеть 2»
Fig. 9. Modeling results: a – change of voltage on the element “Ship network 2”;
б – current on the element “Ship network 2”
а б
Рис. 10. Результаты моделирования: а – изменение напряжения на элементе «Судовая сеть 3»;
б – изменение тока на элементе «Судовая сеть 3»
Fig. 10. Modeling results: a – change of voltage on the element “Ship network 3”;
б – current on the element “Ship network 3”
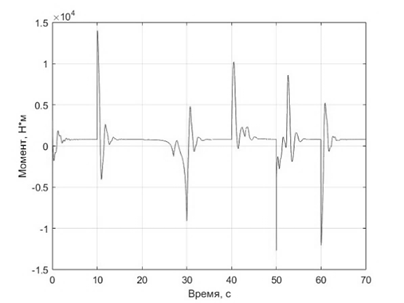
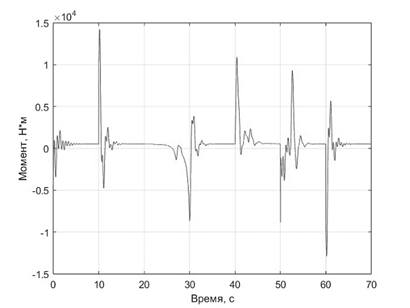
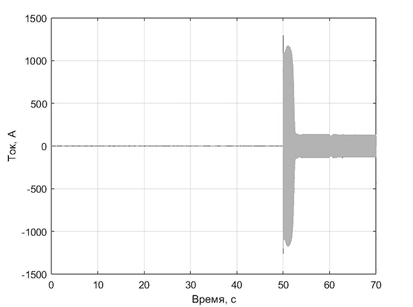
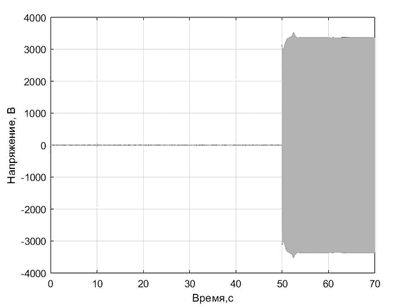
Данные режимы являются наиболее сложными и требуют повышенного внимания при моделировании и исследовании процессов в системе. На рис. 11 показан график изменения фазных токов и напряжений на статоре асинхронного двигателя, вызванного сложным характером нагрузки внешних сил на подруливающие устройства, которая подключается на 50-й секунде. Переходный процесс протекает почти 10 секунд, и на 60-й секунде происходит скачок напряжения и тока в связи с включением остальных потребителей.
На рис. 12, 13 представлена динамика двухполупериодного шестипульсного выпрямителя со средним значением. Мощность выпрямителя на стороне переменного тока равна сумме фиксированных потерь мощности и выходной мощности выпрямителя на стороне постоянного тока. Показаны токи и напряжения постоянной части выпрямителя. Ток резко увеличивается, начиная с момента включения двигателя, и при команде «полный вперед» с 30-й по 40-ю секунду остается почти постоянным. Также видно мгновенное падение напряжения при включении остальных потребителей на 60-й секунде мощностью 6 кВт.
а б
Рис. 11. Результаты моделирования: а – тока асинхронного двигателя при запуске подруливающих устройств;
б – напряжения асинхронного двигателя
Fig. 11. Modeling results: a – induction motor current at thruster startup; б – induction motor voltage
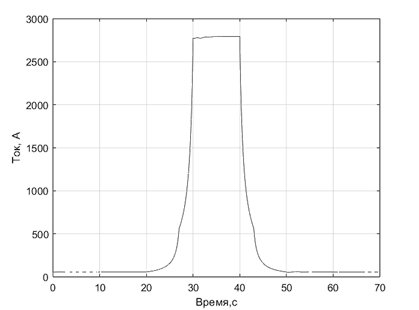
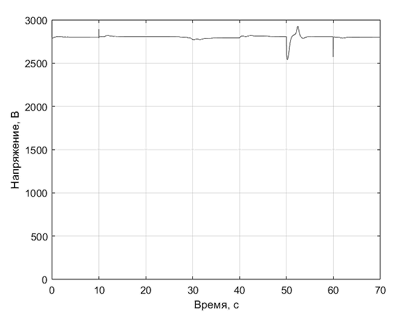
а б
Рис. 12. Результаты моделирования: а – скачки тока выпрямителя; б – изменение напряжения
Fig. 12. Modeling results: a – rectifier current surges; б – voltage change
а б
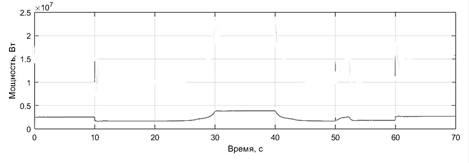
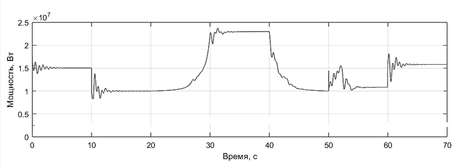
Рис. 13. Изменение мощности на главных двигателях:
а – переходный процесс выходной мощности дизель-генератора;
б – переходный процесс выходной мощности газотурбинной установки
Fig. 13. Change of power at main engines: a – transient process of output power of diesel generator;
б – transient process of output power of turbo-generator
Уровень 1. На этом уровне показаны переходные процессы в системах управления дизель- и турбогенераторами. Система «синхронный генератор – выпрямитель – двигатель» позволяет плавно изменять частоту вращения гребного двигателя в широких пределах и получать требуемые механические характеристики. Для регулирования требуются сигналы малой мощности для возбуждения синхронного генератора. Следует отметить, что в моделях электрических машин могут быть учтены механические процессы и дефекты, что позволяет определять их в спектре тока [7, 8].
На рис. 14, 15 приведены результаты моделирования системы управления возбуждением турбо- и дизель-генератора. Ток возбуждения дизельного генератора изменяется более плавно, чем газотурбинной установки. Переходный процесс до 10-й секунды вызван индуктивным характером постоянной базовой нагрузки, действующей во всем диапазоне времени моделирования.
а б
Рис. 14. Результаты моделирования: а – напряжение возбуждения дизель-генератора;
б – ток возбуждения дизель-генератора
Fig. 14. Modeling results: a – excitation voltage of diesel generator; б – generator excitation current
а б
Рис. 15. Результаты моделирования: а – напряжение возбуждения;
б – ток возбуждения синхронного турбогенератора
Fig. 15. Modeling results: a – excitation voltage; б – excitation current of synchronous turbo-generator
В результате моделирования получены параметры переходных процессов в электрической и механической частях системы судна. Очевидно, что включение нагрузки влияет на работу главных двигателей, регулирование напряжения генераторов и механическую часть привода системы электродвижения. Также на подобных моделях могут быть проанализированы аварийные варианты развития событий на судне: короткие замыкания, выход из строя оборудования, прочие процессы в судовых токопроводящих частях [9].
Заключение
Объектно-ориентированное моделирование пре-доставляет широкие возможности для описания и моделирования сложных уровневых систем с целью отладки, исследования и построения обучающих платформ. Современные требования классификационных сообществ для автономных судов требуют наличия подобной цифровой платформы моделирования. Расчет режимов дает возможность оценить динамику процесса, синтезировать регуляторы переходных процессов и спроектировать силовую цепь и схемы защиты. Подобные модели могут использоваться при организации систем удаленной диагностики и автономного управления для достижения следующих целей:
– имитационного ситуационного моделирования;
– исследования моделей надежности при оценке рисков автономного судовождения;
– разработки цифрового двойника «что если»;
– обучения интеллектуальных систем управления;
– выработки оптимальных режимов функционирования.
Реальная судовая энергосистема в таком случае должна обладать обратной связью и цифровыми каналами, а также технической возможностью передавать данные в режиме реального времени. Отдельно следует отметить, что весьма перспективным видится интеграция в подобные модели систем берегового питания и аккумуляторов энергии.
1. Boychuk I. P., Grinek A. V., Martyushev N. V., Klyuev R. V., Malozyomov B. V., Tynchenko V. S., Kukartsev V. A., Tynchenko Ya. A., Kondratiev S. I. A Methodological Approach to the Simulation of a Ship’s Electric Power System // Energies. 2023. N. 16. P. 8101. https://doi.org/10.3390/en16248101.
2. Uriarte F. M. Multicore simulation of an ungrounded power system // IET Electrical Systems Transportation. 2011. N. 1 (1). P. 31–40. DOIhttps://doi.org/10.1049/iet-est.2010.0019.
3. Linares L. R., Marti J. R. A resynchronization algorithm for topological changes in real time fast transients simulation // 14th Power Systems Computation Conference. Seville, Spain, June 24–28, 2002. P. 1–7.
4. Официальный сайт научно-производственного центра «Судовые электротехнические системы». URL: https://npcses.ru (дата обращения: 18.07.2024).
5. Бойчук И. П., Гринек А. В., Корнев А. В., Фищенко А. М., Слепов О. Е. Полимодельное описание электро-энергетической системы судна // Эксплуатация мор. трансп. 2022. № 4 (105). С. 188–195.
6. The Math Works, Inc. 2010. SimPowerSystems 5 User's Guide. URL: http://www.mathworks.com/help/toolbox/physmod/powersys (дата обращения: 17.07.2024).
7. Grinek A. V., Boychuk I. P., Fishenko A. M., Savosteenko N. V., Gerasimenko O. N. Investigation of the operation of a ship's synchronous generator based on a numerical model // Journal of Physics: Conference Series. 2021. N. 2061. P. 012004. DOIhttps://doi.org/10.1088/1742-6596/2061/1/012004.
8. Вершинин В. И., Махонин С. В., Паршиков В. А., Хомяк В. А. Алгоритм векторного управления гребными электроприводами на основе синхронных двигателей для ледоколов с движителями типа «Азипод» // Тр. Крылов. гос. науч. центра. 2019. Т. 3. № 389. С. 103–112. DOIhttps://doi.org/10.24937/2542-2324-2019-3-389-103-112.
9. Цицикян Г. Н. Результаты развития судовых электроэнергетических систем // Тр. Крылов. гос. науч. цен-тра.2019. Т. 1. № 387. С. 123–130. DOIhttps://doi.org/10.24937/2542-2324-2019-1-387-123-130.
