












Россия
Проанализирован принцип работы современных водолазных судов, оснащенных системами динамического позиционирования (DP). Рассматривается классификация водолазных работ на такого рода судах. Для выполнения определенных строительных работ или обслуживания подводных объектов необходима водолазная команда – самый главный компонент в составной части сложнейшей работы, где ROV (телеуправляемый необитаемый подводный аппарат) рабочего класса, оснащенный инструментами для выполнения определенных целей, не приспособлен для сложных задач. Затрагивается тема ограничения длины шлангокабеля (технология, обеспечивающая доставку жизненно важных расходных материалов, сигналов и энергии по кабелю к водолазу) для подводных работ. Проводится оценка безопасного расстояния работы водолазов вблизи носовых подруливающих устройств и винторулевых колонок судна DP на примере самого современного на Каспийском море судна для поддержки водолазных работ, а также для монтажа подводных конструкций глубоководных оснований «Ханкенди». Сделаны выводы о широком использовании систем DP на современных судах, в частности вовлеченных в нефтегазовую промышленность, а также другие области морской промышленности. Проведено исследование оценки безопасности водолазных работ судна DP, работающего на мелководье. Дана оценка по ограничению движения судна во время водолазных работ. Указана специфика универсального судна, задействованного в связи с рисками человеческой жизни, рабочей среды водолазов, различных состояний окружающей среды, близости пропульсивных установок судна и множеством других дополнительных рисков, которые представляют опасность. Подтвержден тезис о необходимости тщательного планирования реализации водолазных работ и управления ими.
судно, динамическое позиционирование, водолаз, позиция судна, система, безопасность, риск
Введение
Diving Support Vessels (DSV) – водолазные суда, предназначенные для поддержки строительных и ремонтных подводных работ в сфере нефтегазовой промышленности. Водолазные работы можно считать наиболее потенциально опасными операциями из всех возможных морских работ, связанных с морской нефтегазовой отраслью. В основном эти работы проводятся на устьях нефтегазовых скважин и трубопроводах. Система динамического позиционирования (DP) используется для удержания судна в заданной точке или управления в соответствующей траектории движения. Суда, оснащенные DP, выполняют множество задач и операций, некоторые из которых, особенно водолазная деятельность, непосредственно связаны с опасностями для человеческой жизни. Водолазные работы проводятся на тех участках, где телеуправляемый необитаемый подводный аппарат (ROV) уже не способен выполнять надлежащую функцию, т. к. некоторые задачи не предназначены для подводных аппаратов из-за сложности выполняемой работы. Для безопасного проведения водолазных работ необходимо учитывать многие факторы, характерные для заданного процесса, водолазного судна и конкретного места проведения операции [1, 2].
Материалы исследования
Водолазные судна класса DP-2 или DP-3 предусмотрены для работы вблизи объектов нефтегазовой отрасли вследствие улучшенных качеств маневрирования, удержания позиции и курса даже в суровых условиях окружающей среды. Класс DP определяется уровнями надежности: чем больше дублирование всех компонентов DP-системы, тем выше класс. Дублирование системы компонентов позволяет предотвратить потерю позиции и/или курса при сбое какого-либо компонента DP-системы. Меры по делению системы на классы гарантируют, что система останется функциональной даже после потери любого отдельного элемента или подсистемы. Огромное количество разнообразных подводных задач выполняется с использованием в качестве рабочей платформы судна, оснащенного системой DP. Эти операции варьируются от рутинных задач с использованием ROV до сложных задач, связанных с работой водолазов при постройке различных подводных конструкций для нефтегазовых месторождений. Несмотря на растущие способности современных технологий ROV, водолазы по-прежнему часто являются единственным реальным выбором для решения некоторых задач [3].
Производственные организации, входящие в состав Международной морской ассоциации подрядчиков (IMCA), выполняют подводные работы на морском шельфе. В стандартах ассоциации упоминаются лишь квалификации, соответствующие третьему и четвертому уровню Международной ассоциации водолазных школ (IDSA), спуски методом L03 air diving и L04 saturation diving (рис. 1).
Международная ассоциация морских подрядчиков (IMCA) приводит следующую классификацию водолазных работ:
1. L03 air diving – погружение и проведение работ на глубинах до 50 м. Погружение водолазов происходит в водолазном колоколе открытого типа. Водолазы дышат кислородом, который подается через шлангокабель.
2. L04 saturation diving – погружения на глубины 50–250 м, при которых водолазы дышат специальной газовой смесью КГС (кислородно-гелиевая смесь).
3. Deep ocean work – погружения на большие глубины.
В настоящее время практический предел для погружения с колоколом составляет около 300 м. На больших глубинах работы должны выполняться с помощью глубоководного аппарата ROV или водолазом в атмосферном водолазном костюме (ADS) [5]. Если работа небольшая и погружение разовое, то весь процесс компрессии/декомпрессии водолазы проходят непосредственно во время погружения/подъема в закрытом водолазном колоколе. Водолазный колокол опускается через специальную шахту в корпусе судна. Когда водолаз находится вне колокола на глубине, газовая смесь и горячая вода для согревающего водолазного снаряжения подаются по шлангокабелю, соединенному с колоколом и в итоге идущему на судно. Помимо этого, шлангокабель включает в себя кабель связи с водолазом, передачу видеоизображения и кабель для освещения (рис. 2).
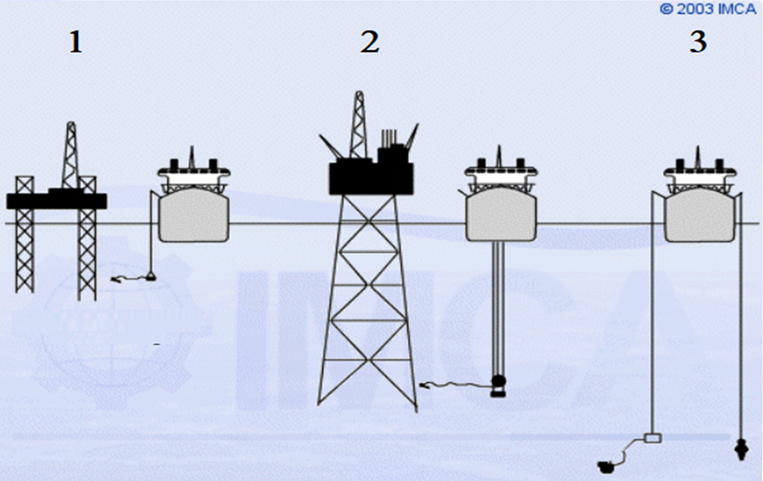
Рис. 1. Виды спусков водолазов [4]:
1 – воздушные погружения; 2 – сатурационные погружения; 3 – глубоководные спуски
Fig. 1. Types of divers' descents [4]: 1 – air diving; 2 – saturation diving; 3 – deep ocean work
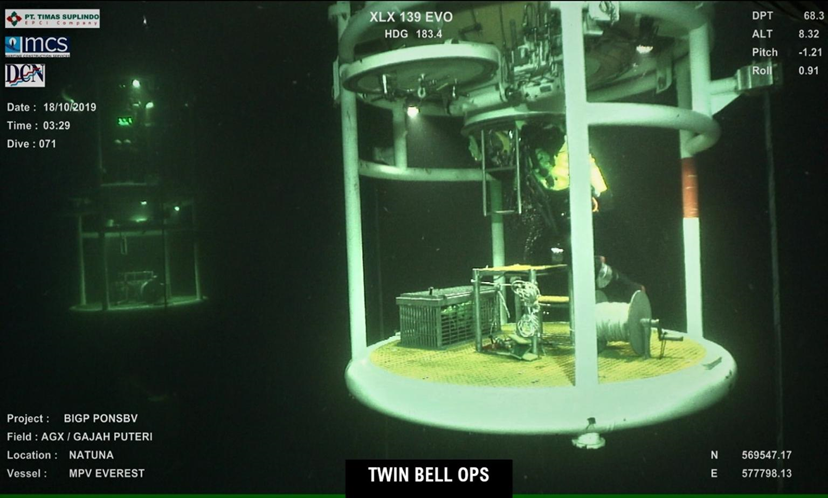
Рис. 2. Водолаз на морском дне, связанный с колоколом с помощью шлангокабеля
(18.10.2019, скриншот с водолазного судна «Эверест» с системой двойного колокола)
Fig. 2. A diver on the seabed connected to the bell by umbilical
(10/18/2019, screenshot from the diving vessel Everest with a double bell system)
Помимо требования отказоустойчивости класса судна, к водолазным судам, оснащенным системой DP, предъявляются специальные требования для обеспечения безопасности водолазов, находящихся в непосредственной близости к пропульсивным установкам судна. Наиболее серьезной опасностью, связанной с операциями по поддержке водолазов, является вероятность попадания водолаза в работающий винт [6]. Эта опасность устраняется путем обеспечения обязательного ограничения водолазного шлангокабеля по длине, чтобы водолаз не мог добраться до каких-либо подруливающих устройств или винтов. Руководящие положения требуют минимального запаса прочности – 5 м. Длина шлангокабеля должна быть согласована между мостиком и начальником водолазной службы перед любой водолазной операцией и будет являться частью контрольного чек-листа перед погружением [7, 8]. На рис. 3 показана безопасная длина шлангокабеля для рабочего водолаза.
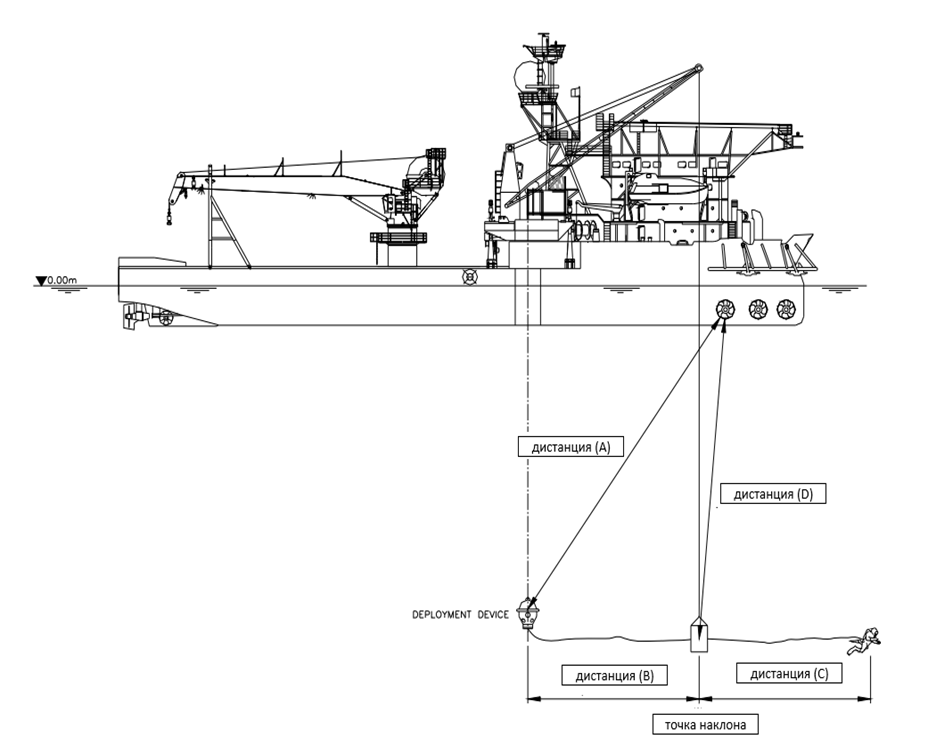
Рис. 3. Безопасная длина шлангокабеля для рабочего водолаза
Fig. 3. The safe length of the umbilical for the working diver
Применяются следующие ограничения на безо-пасное рабочее расстояние для шлангокабеля рабочего водолаза:
– в зависимости от того, какое расстояние короче, Cmax = D – 5 м или Cmax = A – 5 м;
– всегда B < C, чтобы в случае чрезвычайной ситуации водолаз мог сразу вернуться в колокол.
Принятые обозначения: A – дистанция от колокола до ближайшей физической опасности; B – дистанция от колокола до точки обслуживания в воде; C – дистанция от точки обслуживания в воде до водолаза; D – дистанция от точки обслуживания в воде до ближайшей опасности.
Согласно рис. 3 основную ответственность за водолазные работы на судне DP несет оператор системы, который управляет позиционированием судна и должен информировать другие соответствующие службы управления об изменениях рабочих условий и обстоятельств.
На рис. 4 показаны расстояния от колокола до подруливающих устройств и винторулевых колонок судна «Ханкенди» в точке обслуживания на морском дне с использованием одного или двух водолазов на рабочем месте в период saturation diving. Во время операции нужно учитывать расстояние работы от предполагаемой точки входа устройства развертывания водолаза до подруливающих устройств и винтов судна. В частности, длина шлангокабеля любого работающего водолаза должна быть ограничена таким образом, чтобы он не находился в пределах 5 м от любых физических опасностей, таких как подруливающие устройства, гребные винты и т. д. Если рабочий водолаз и дежурный водолаз находятся в разных местах, следует учитывать расчет безопасной длины шлангокабеля.
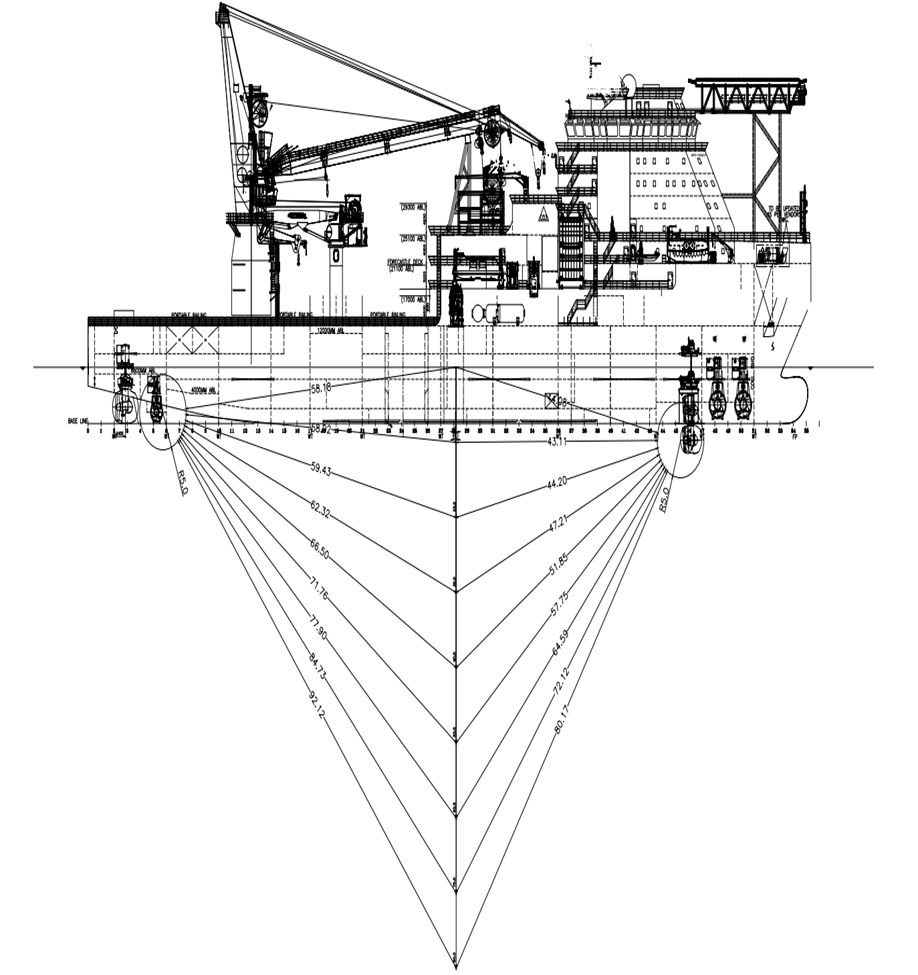
Рис. 4. Диаграмма безопасной длины шлангокабеля водолаза для сатурационных погружений
на примере многоцелевого судна «Ханкенди»
Fig. 4. Diagram of the safe length of the diver's umbilical for saturation diving using the example
of the multi-purpose vessel Khankendi
На схеме рис. 5, как и на схеме рис. 4, показаны расстояния от колокола до подруливающих устройств и винторулевых колонок судна, но для air diving. Так как размещения и способ развертывания колоколов как для saturation diving, так и для air diving различна, мы имеем различные расстояния для безопасности водолазов.
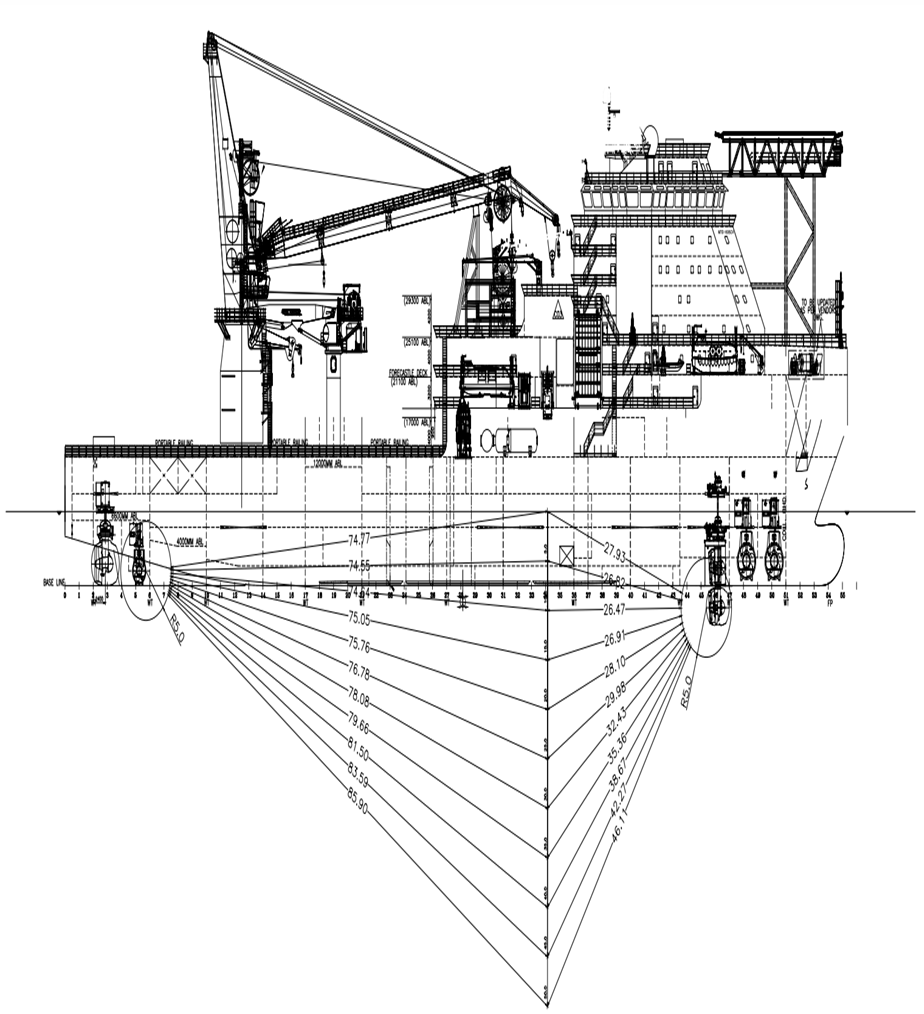
Рис. 5. Диаграмма безопасной длины шлангокабеля водолаза для воздушных погружений
на примере многоцелевого судна «Ханкенди»
Fig. 5. Diagram of the safe length of the diver's umbilical for air diving using the example
of the multi-purpose vessel Khankendi
Флагман каспийского нефтегазового флота «Ханкенди» в первую очередь предназначен для строительства на Каспии подводных сооружений мирового уровня на глубине до 550 м. После завершения постройки и ввода в эксплуатацию судно было отправлено в район Шах-Дениз для начала подводных монтажных работ для проекта разработки газа «Шах-Дениз. Этап № 2».
Согласно подробным схемам судна «Ханкенди», как для air diving, так и для saturation diving, можно дать оценку по ограничению для перемещения судна во время водолазных работ. Курс и позиция судна во время выполнения водолазами подводных работ могут быть изменены, если руководитель водолазных работ и оператор DP уверены в том, что:
– перемещение судна может быть выполнено безопасно;
– шлангокабель ни за что не зацепился и не зацепится во время перемещения судна;
– водолазы прошли инструктаж и будут находиться в безопасном месте;
– водолазы могут быстро вернуться в колокол;
– во время перемещения судна или изменения курса будут задействованы резервные навигационные системы;
– перемещение будет осуществляться на самом малом ходу;
– изменения курса и позиции не будут выполняться одновременно и могут быть остановлены в любой момент;
– особое внимание должно быть уделено выбору центра вращения судна при изменении курса.
Заключение
Современное управление безопасностью водолазного судна основано на эффективной оценке, планировании и оценке опасностей до начала водолазных работ. Этот принцип широко применяется в международных регламентах. Планирование и оценка рисков водолазных работ на судах, оснащенных системой DP, должны проводиться капитаном судна, начальником водолазных работ и другим специализированным персоналом по мере необходимости. Следует рассмотреть объем работ и принять меры для всех предсказуемых чрезвычайных ситуаций, таких как отказ DP, спасение водолазов и т. д. Статистика свидетельствует о том, что вероятность аварии в энергосистеме ниже, чем вероятность потери позиции судна. Особенно нужно учитывать фактор мелководья, т. к. дискомфорт водолазам могут оказать шум подруливающих устройств и винторулевых колонок, работа на засоренном грунте, акустические способы ориентации более чувствительны к искажениям, связанным с внешними воздействиями от судна.
При проведении водолазных работ на мостике судна должно быть не менее двух операторов системы DP. Все судовые посты (водолазных спусков, машинного отделения) и каюты капитана, старшего механика, начальника водолазной службы, как минимум, должны оснащаться системой звуковой и световой сигнализации для оповещения об изменении статуса текущих операций.
1. Шостак В. П. Динамическое позиционирование плавучих объектов. Чикаго: Мегатрон, 2010. 130 с.
2. Hubert Faÿ. Dynamic Positioning Systems: Principles, Design and Applications. Editions OPHRYS, 1990. 189 p.
3. IMO MSC Circular 645, Guidelines for vessels with dynamic positioning systems. The International Marine Contractors Association, 1994. 20 p.
4. Introduction to Dynamic Positioning. The International Marine Contractors Association, 2003. 31 p.
5. Bray D. J. DP Operator's Handbook. Nautical Institute publication (UK), 2020. 142 p.
6. Speight J. G. Handbook of offshore oil and gas operations. Gulf Professional Publishing, 2015. 428 p.
7. IMCA D 010. Diving operations from vessels operating in dynamically positioned mode. The International Marine Contractors Association (rev. 4), 2023. 22 p.
8. IMCA D 014. International code of practice for offshore diving. The International Marine Contractors Association (rev. 3.1), 2023. 86 p.
