












Россия
Россия
Россия
Россия
УДК 004.94 Компьютерное моделирование
Рассматривается проблема оценки состояния морской поверхности с помощью комплексирования спутниковых и судовых измерений. Для обеспечения безопасного мореплавания и планирования маршрутов перехода судов важной является информация о силе и направлении ветра у поверхности моря. Она имеет ключевое значение для прогноза погоды и волнения. Данные о ветре традиционно получают с борта проходящих судов и буев. Судовые данные охватывают лишь ограниченные районы Мирового океана и поступают неравномерно, данные буев сильно разрежены, что не дает возможности получить адекватную картину распределения атмосферных потоков. Использование спутников дистанционного зондирования позволило на порядки повысить плотность измерений скорости и направления ветра, актуальность полученных данных. Однако спутниковые измерения могут искажаться. В частности, влияние атмосферных осадков (дождя) может давать погрешность измерения скорости ветра в два раза. Сильный и слабый ветер также создает проблемы: при сильных ветрах измеренные данные занижают истинную скорость ветра, при слабых – завышают. Предлагается метод коррекции спутниковых данных о скорости и направлении ветра. Суть метода состоит в использовании подспутниковых судовых измерений совместно со спутниковой информацией. Зная данные о погоде, измеренные локально (с борта судна), можно рассчитать параметры регрессии для коррекции спутниковых данных. Применив регрессию с рассчитанными параметрами к спутниковым снимкам на акватории, можно получить более точные данные о погоде в районе маршрута движения судна. Приводятся результаты расчетов на реальных спутниковых и бортовых данных в акватории Охотского моря. В качестве регрессионной функции взят полином второй степени. Показано, что коррекция с помощью подспутниковых судовых измерений точнее характеризует волнение, чем данные, непосредственно полученные со спутника.
судовые измерения, спутниковые измерения, SeaWinds, QuickSCAT, волнение, приводной ветер, локальная коррекция, полином, флаг «дождь», обратное рассеяние
Введение
Чтобы обеспечить безопасность при мореплавании, необходимо решить задачу с большим количеством переменных. Одной из таких задач является планирование безопасного маршрута перехода из порта отправления в порт назначения [1–5].
Для прогнозирования синоптической ситуации на поверхности Мирового океана требуются согласованные данные о приповерхностном ветре в online-режиме. Такие наблюдения необходимы для моделирования поведения поверхности океана, высоты морского волнения, расчета поверхностных потоков тепла и влаги, а также для построения климатической карты Мирового океана. Постановка такого рода задач предусматривает частое обновление информации и различные масштабы охвата океана, включая глобальный.
До запусков спутников, способных дистанционно зондировать океан, информация о длине/высоте/ направлении распространения волн, скорости и направлении приповерхностного ветра, скорости и направления течения, морских льдах, температуре поверхности океана, солености и т. д. приходила с судов и буев. Хотя эти наблюдения чрезвычайно полезны, они также имеют серьезные ограничения и, как правило, некорректны в случае глобального применения. Например, сообщения о приповерхностном ветре с судов:
– часто имеют низкую точность;
– охватывают лишь очень ограниченные районы Мирового океана;
– поступают через неравномерные промежутки времени и пространства.
Буи, хотя и обладают более высокой точностью, имеют чрезвычайно разреженный охват. Из-за этих недостатков анализ параметров Мирового океана может искажать реальную картину.
Таким образом, исследования океана с помощью научно-исследовательских судов и автономных буев не дают полной картины изменчивости океана, т. к. невозможно полностью охватить постоянные изменения состояния Мирового океана.
Спутниковые измерения
Ветра у поверхности океана являются наиболее важным фактором, связывающим океан и атмосферу. Приповерхностные ветры направляют потоки тепла и влаги на границе атмосферы и океана. Они имеют ключевое значение для долгосрочного прогнозирования климата (от 1 месяца до 1 года). Данные о приповерхностном ветре также необходимы для отслеживания текущего состояния Мирового океана (погода, волнение, направление и скорость течения и т. д.), а также для его прогнозирования [6, 7].
Для исследования приповерхностного ветра используются СВЧ-радиометры и скаттерометры. Одним из таких приборов является SeaWinds (рис. 1), расположенный на спутнике NASA QuickSCAT и запущенный в июне 1999 г. [8].
Основной задачей прибора является получение данных о векторе приповерхностного ветра над Мировым океаном при любых условиях (кроме дождя – от умеренного до сильного). Эти данные необходимы при построении точной климатической карты Мирового океана.
Рис. 1. Прибор SeaWinds на борту QuickSCAT
Fig. 1. The SeaWinds instrument on board QuickSCAT
Полоса сканирования QuickSCAT равна 1 800 км. Полосы QuickSCAT покрывают 90 % земной поверхности за 24 ч. Угол наклона орбиты спутника относительно экватора – около 72°. Выделенные участки (рис. 2) – это полоса сканирования SeaWind на отрезке орбиты от 30° южной широты, через 72° северной широты и обратно до 30° южной широты.
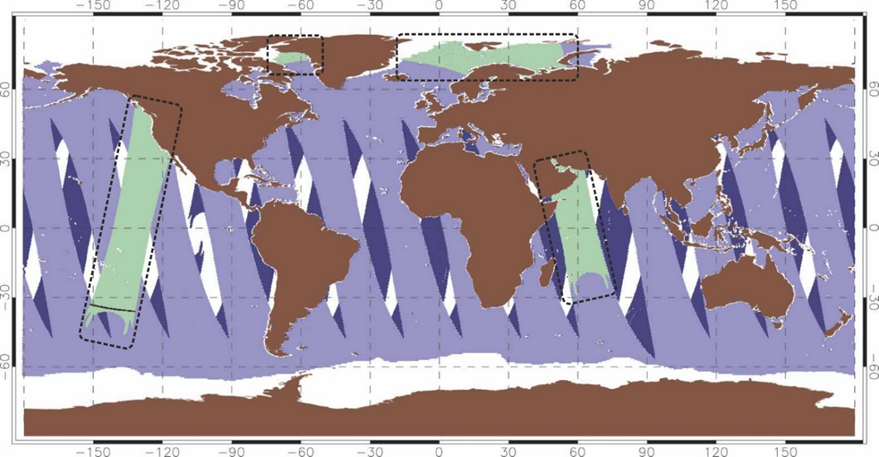
Рис. 2. Зона охвата земной поверхности спутником QuickSCAT
Fig. 2. The QuickSCAT Earth's surface coverage area
Принцип работы SeaWinds
SeaWinds – это активный микроволновой радар Ku-диапазона, работающий на частоте 13,4 ГГц, с установленной антенной (см. рис. 1), которая вращается со скоростью 18 об/мин. Данная антенна испускает два отдельных узконаправленных луча, состоящих из непрерывного потока импульсов (рис. 3) и принимает излучение, отраженное от поверхности океана. Чем больше шероховатость, тем интенсивнее отраженное излучение. Для определения шероховатости морской поверхности используется величина обратного рассеяния s0, которая находится из отношения мощностей принимаемого и излучаемого сигналов [8].
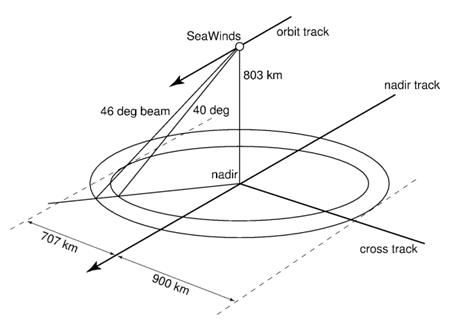
Рис. 3. Полоса сканирования SeaWinds
Fig. 3. SeaWinds’s scan swath
Каждая ячейка, для которой определяется интенсивность излучения, просматривается многократно при разных азимутах «вперед» и «назад» в процессе движения спутника по орбите. Существует четыре типа измерений: «внутреннее – вперед», «внешнее – вперед», «внутреннее – назад», «внешнее – назад». Здесь «внутренний» и «внешний» относятся к внутреннему и внешнему сканирующим лучам с углами обзора 39,876° и 45,890°, что дает приблизительно постоянные углы падения на земную поверхность 45° и 53,6° соответственно [8].
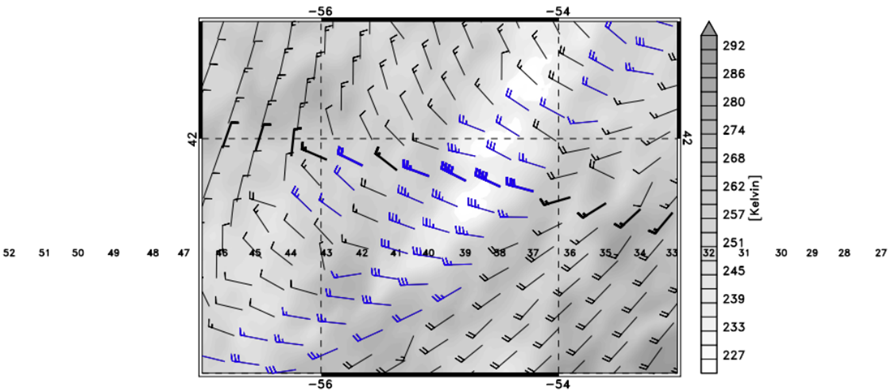
Таким образом, значения обратного рассеивания для одной элементарной ячейки, размер которой составляет 25 км, наблюдаются в течении 290 с. Для уменьшения ошибки измерений в каждой ячейке проводятся многократные зондирования сигналами HH, HV, VH, VV (H – горизонтальная, V – вертикальная) поляризации при разных азимутах [9]. На рис. 4 изображены результаты измерения, наблюдаемые в 22:15 UTC 28 сентября 2000 г. над Западной Атлантикой. Данные SeaWinds, помеченные как «загрязненные дождем», выделены полужирным (синим цветом) [10].
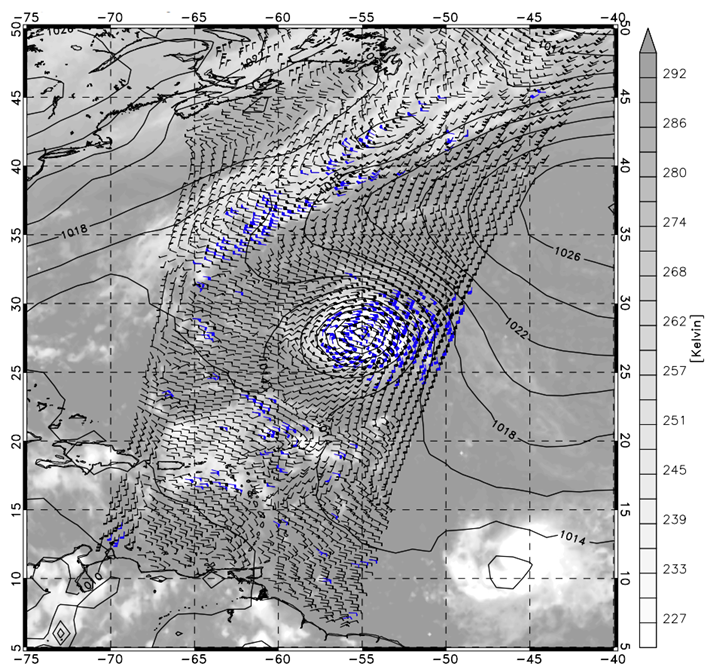
Рис. 4. Данные SeaWinds, полученные 28 сентября 2000 г. над Западной Атлантикой
Fig. 4. SeaWinds data over the Western Atlantic obtained on September 28, 2000
Данные QuickSCAT сформированы в виде массива, в котором каждая ячейка идентифицирована тремя числами: положение вдоль пути – номер ряда, положение поперек пути – номер ячейки, номер оборота. Один оборот содержит массив данных размером 76 на 1 624.
Оценка измерений скаттерометра
Обратное рассеяние s0 и скорость приповерхностного ветра V связаны функцией геофизической модели F [10]:
s0 = F(V, α, θ, f, p), (1)
где α – азимутальный угол; θ – угол падения; f – частота, для морских ветров f = 13,4 ГГц; p – поляризация.
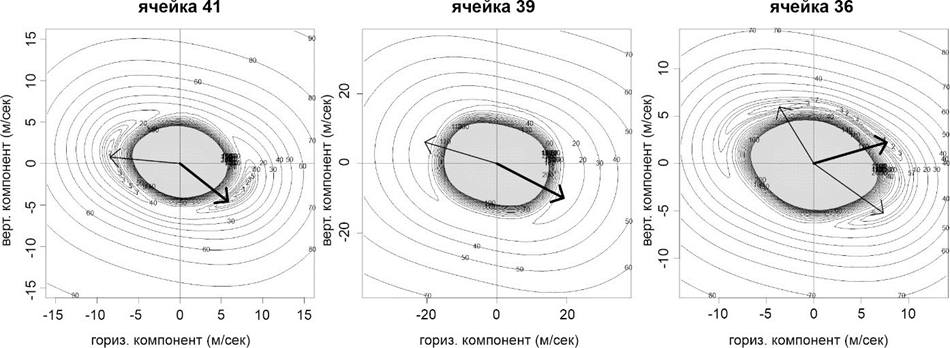
Уравнение (1) не учитывает влияние других параметров, кроме приповерхностного ветра. Одним из неучтенных факторов является дождь. Дождь изменяет обычную поверхность океана, а на частоте 13,4 ГГц он рассеивает мощность излучения скаттерометра, что приводит к значительным ошибкам при определении приповерхностного ветра. На рис. 5 приведен пример того, как дождь искажает данные о приводном ветре. На рис. 5, а представлен выделенный ряд векторов ветра. Ячейки 41 и 36 не загрязнены дождем, а ячейка 39 попала под дождь [10].
а
б
Рис. 5. Влияние дождя на приповерхностный ветер:
а – ряд данных о векторе ветра; б – информация с ячеек 41–39–36
Fig. 5. The rain effect on the surface wind: a – a series of wind vector data; б – cells 41-39-36 wind information
Согласно данным на рис. 5, б дождь увеличил скорость ветра в ячейке 39 практически в два раза, по сравнению со свободными от дождя ячейками.
Сильный и слабый ветер также создает проблемы. При ветрах выше 25 м/с данные занижают истинную скорость ветра. При слабых ветрах морская поверхность подобна гладкому стеклянному отражателю и мощность отраженного сигнала очень мала, т. е. обратное рассеивание s0 может принимать отрицательные значения, что недопустимо [11].
Коррекция спутниковой информации о состоянии морской поверхности
Метод коррекции спутниковой информации о состоянии морской поверхности заключается в использовании подспутниковых судовых измерений, полученных по методу В. И. Сичкарева [12, 13] или методу из работы [14], совместно со спутниковой информацией.
Для получения надежных данных необходимо большое количество спутниковых и судовых измерений, выполненных в одно и то же время в исследованном районе, т. к. спутниковые алгоритмы используют недокументированные в открытом доступе параметры коррекции.
Предлагается рассмотреть сравнение данных SeaWinds и судовых измерений экспедиции Морского государственного университета (МГУ) имени адмирала Г. И. Невельского, выполненных на парусном судне «Надежда» в 2001 г. Данный временной интервал выбран исходя из того, что проведенные в тот период исследования позволили получить большой объем необходимой информации. Позже МГУ им. Г. И. Невельского не организовывал столь масштабных экспедиций. Также в рассмотренный период стало возможным заказывать спутниковые данные в NASA на оптических носителях.
Для анализа из судовых измерений отбирались попадающие во временное окно пролета спутника данные. Выборка составила 752 измерения. Из нее было исключено 161 значение, т. к. в соответствующих им пикселях спутникового снимка отсутствовали данные о ветре или содержали флаг «дождь». Этот флаг указывает, что данные в такой ячейке недостоверны (ячейки 2, 10–15 на рис. 6).
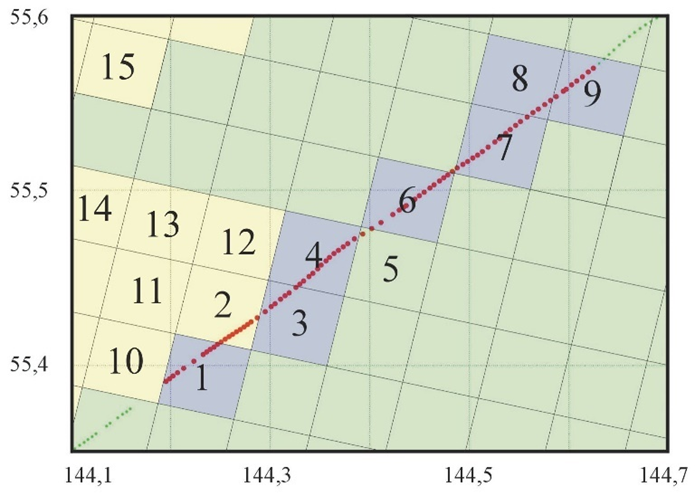
Рис. 6. Распределение судовых отчетов по полосе зондирования QuikSCAT (27.08.2001):
точки – судовые измерения; 1, 3, 4, 6–9 – пиксели, используемые для расчета;
2, 10–15 – пиксели с недопустимым флагом
Fig. 6. Ship reports Distribution on the QuikSCAT scan swath (27.08.2001): points – ship measurements;
1, 3, 4, 6-9 – satellite data used for calculation; 2, 10-15 – satellite data with an invalid flag
Таким образом, в 60 пикселях данных SeaWinds для сравнительного анализа было использовано 591 значение судовых измерений. Места, в которых были выбраны данные для расчета параметров алгоритма коррекции спутниковых данных, представлены на рис. 7.
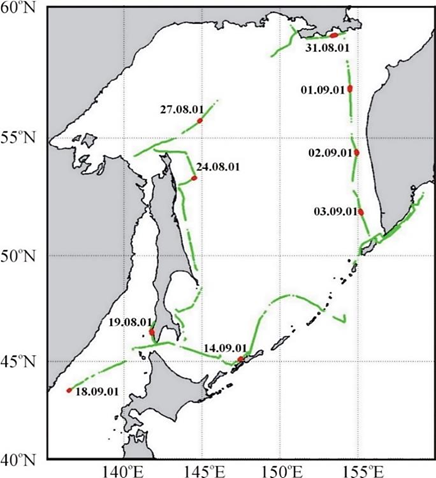
Рис. 7. Маршрут парусного учебного судна «Надежда» и даты выбора судовых и спутниковых данных
Fig. 7. The route of the STS Nadezhda and the dates of selection ship and satellite data
На рис. 8 приведена диаграмма рассеяния судовых измерений истинного волнения hist, измеренного с помощью метода В. И. Сичкарева [12] и спутникового измерения волнения hsat, полученного по данным скаттерометра SeaWinds и заказанного через портал NASA [15]. Согласно диаграмме при слабых ветрах спутниковый сканер немного завышает значение приповерхностного ветра. Учитывая значение приповерхностного ветра, измеренного локально более точными методами, можно рассчитать алгоритмы, содержащие регрессионные коэффициенты локальной коррекции спутниковых данных. Применив полученные алгоритмы к спутниковым снимкам на акватории, можно получить более точные данные в районе траектории движения судна. Используя для валидации спутниковых данных информацию от большего количества судов в акватории, возможно получение более точных оценок с корректурой поправочных коэффициентов алгоритма в процессе движения судов по акватории.
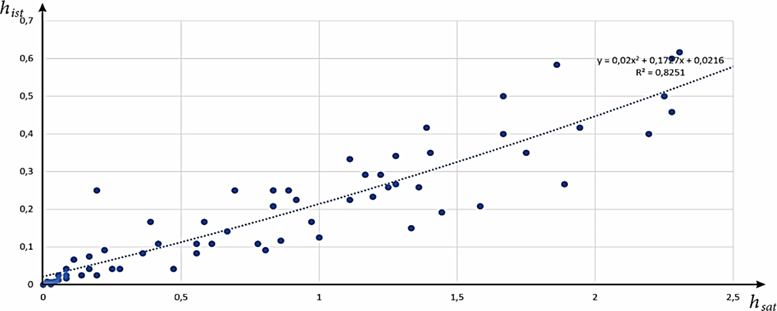
Рис. 8. Диаграмма рассеяния судовых измерений hist и рассчитанных по данным SeaWinds hsat волнений
Fig. 8. Scattering diagram of ship measurements hist and data calculated from SeaWinds hsat
В качестве первоначального приближения предлагается аппроксимировать диаграмму рассеяния полиномом второй степени:
f(x) = p1x2 + p2x + p3, (2)
где pi – поправочные коэффициенты.
Полученные методом наименьших квадратов коэффициенты полинома приведены в таблице.
Коэффициенты полинома локальной коррекции спутниковых данных
Polynomial coefficients of the local correction
of satellite data
|
Коэффициент полинома p |
Значение |
|
p1 |
0,0104 |
|
p2 |
0,6101 |
|
p3 |
0,2131 |
Используя приведенные в статье результаты, возможно создать систему, позволяющую осуществлять коррекцию спутниковых данных по любому из измеряемых локально параметров окружающей среды вокруг судна. В такой системе изначально будут использоваться параметры волнения, определенные с помощью судовых измерений. Далее при получении спутниковых и подспутниковых данных в анализируемой акватории коэффициенты данного полинома (2) пересчитываются автоматически.
На рис. 9 показано применение полученного алгоритма спутниковой коррекции к данным SeaWinds, приведенным на рис. 6. На рис. 10 приведен пример использования разработанной системы для всего Охотского моря.
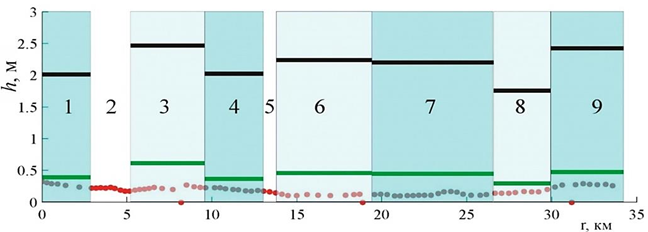
Рис. 9. Распределение волнения по данным сканера SeaWinds (27.08.2001), отмеченным на рис. 6:
точки – данные с судна; верхние линии – исходные спутниковые данные;
нижние линии – спутниковые данные после применения локальной коррекции
Fig. 9. The waves distribution according to SeaWinds scanner data (27.08.2001), marked in Fig. 6:
points – ship data; upper lines – initial satellite data; bottom lines – after local correction satellite data
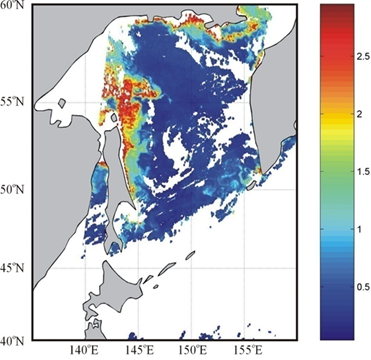
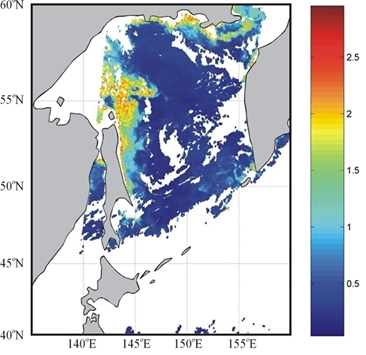
а б
Рис. 10. Распределение волнения, восстановленное из данных SeaWinds на 27.08.2001:
а – алгоритм NASA; б – коррекция с помощью подспутниковых судовых измерений
Fig. 10. The distribution of waves from SeaWinds data on 08/27/2001:
a – NASA algorithm; б – corrected by ship measurements
Согласно рис. 10 коррекция с помощью подспутниковых судовых измерений более точно отображает волнение, чем данные со спутника.
Заключение
Данные спутниковых и судовых измерений должны совпадать по координатам и попадать во временное окно пролета спутника. При этом данные со спутника не должны содержать флага некорректности данных по наличию в точке сканирования дождя или облаков, а также скорость приповерхностного ветра не должна превышать 25 м/с.
Предлагаемая методика может использоваться для других типов данных и других типов спутников. Таким образом, она без существенных изменений может быть применена к любому типу корректировки спутникового зондирования.
При наличии данных, поступающих с судов в анализированном районе, предложенная методика позволяет повысить точность и надежность спутникового мониторинга морской поверхности.
1. Акмайкин Д. А., Бочарова В. В., Гамс А. В. Основные принципы и этапы планирования маршрутов судов // Эксплуатация мор. трансп. 2023. Т. 1. C. 50-54.
2. Гриняк В. М., Акмайкин Д. А., Девятисильный А. С. Оценка перспектив использования данных метеоспутников для планирования маршрута судна в арктических водах // Вестн. Гос. ун-та мор. и реч. флота им. адм. С. О. Макарова. 2019. Т. 11. № 2. C. 209-221.
3. Лебедева М. П., Айзинов С. Д. Методика оценки безопасного движения судов в стесненной акватории // Вестн. Гос. ун-та мор. и реч. флота им. адм. С. О. Макарова. 2017. Т. 9. № 1. С. 111-120.
4. Вишневецкий С. А. Использование метода полей потенциалов для локального планировщика маршрута судна // Эксплуатация мор. трансп. 2016. № 3 (80). С. 37-43.
5. Lazarowska A. Ship’s trajectory planning for collision avoidance at sea based on ant colony optimisation // The Journal of Navigation. 2015. V. 68. Iss. 2. P. 291-307. DOI:https://doi.org/10.1017/S0373463314000708.
6. Лысенко С. А., Логинов В. Ф. Роль океана в изменениях глобального и регионального климата // Докл. Белорус. гос. ун-та информатики и радиоэлектроники. 2018. № 7 (117). С. 56-63.
7. Костяной А. Г. Спутниковый мониторинг климатических параметров океана. Ч. 1 // Фундамент. и приклад. климатология. 2017. № 2. С. 63-85.
8. Atlas R., Bloom S., Hoffman R. Geophysical Validation of NSCAT Winds Using Atmosheric Data and Analyses // Journal of Geophysical Research. 1999. V. 1041. P. 11405-11424.
9. Булатов М. Г., Раев М. Д., Скворцов Е. И. Исследование динамики морских волн в прибрежной зоне по данным радиолокационных наблюдений высокого разрешения // Соврем. проблемы дистанц. зондирования Земли из космоса. 2005. Вып. 2. Т. 5. С. 76-81.
10. Leidner S. M., Hoffman R. N., Cerniglia M. C. Improved quality control for QuikSCAT near real-time data // 12th Conference on Satellite Meteorology and Oceanography, 2003. URL: https://ams.confex.com/ams/annual2003/webprogram/Paper57087.html (дата обращения: 17.08.2023).
11. Draper D. W., Long D. G. An assessment of SeaWinds on QuikSCAT wind retrieval // Journal of Geophysical Research. 2002. V. 107 (C12). P. 3212. DOIhttps://doi.org/10.1029/2002JC001330.
12. Сичкарев В. И., Зинченко К. И. Новые технологии обработки волномерных наблюдений с движущегося судна // Науч. проблемы трансп. Сибири и Дальнего Востока. 2012. № 2. C. 151-154.
13. Сичкарев В. И. Способ определения высот волн по радиолокационной картине волнового поля // Судовождение-2010: сб. науч. тр. Новосибирск: Изд-во НГАВТ, 2010. C. 3-19.
14. Пат. РФ № 2670247, МПК G01S13/00. Устройство для определения основных параметров окружающей среды при движении морского судна / Акмайкин Д. А.; заявл. 24.07.2017; опубл. 19.10.2018.
15. The Physical Oceanography Distributed Active Archive Center (PO.DAAC). URL: https://podaac.jpl.nasa.gov/ (дата обращения: 17.08.2023).
