











Процесс выборки закидного равнокрылого невода (ЗРН) сложен, он происходит с изменением гео-метрических и силовых характеристик, которые взаимосвязаны и зависят друг от друга. Решение задач такого уровня сложности возможно только с помощью дискретных методов, с использованием ЭВМ. Однако для принятия оперативных действий промысловой бригады по корректировке оснастки, скорости выборки урезов и при выполнении конструктивных изменений сетной части ЗРН необходимо оперативно решать задачи по определению геометрических и силовых характеристик. В этой связи возможно с небольшой ошибкой (не более 10 %) определить усилие в процессе выборки урезов на соответствующей тоне на основании квазистатического процесса. Если каждое квазистатическое состояние ЗРН близко к состоянию равновесия и, т. к. скорость выборки урезов небольшая, то принято пользоваться V-аксиомой статики – перенос сил возможен только по линии действия самой силы. Если же определить связь формы ЗРН с действующими силами, то, с учетом уравнения суммы моментов сил относительно точки закрепления урезов, возможно определить геометрические параметры всего ЗРН в целом. Данное условие является необходимым, но недостаточным, и в каждом конкретном случае требуются дополнительные условия. Эти условия и есть временные участки «сплывания» ЗРН. Приведен метод расчета геометрических и силовых характеристик ЗРН 451 × 4,5 м, а также приведен пример расчета, эксплуатируемый при облове гидробионтов Северного Каспия.
закидной равнокрылый невод, квазистатический процесс, выборка урезов, сетная часть, натяжение, сопротивление, оснастка подборы, скорость выборки
Введение
Закидные равнокрылые озерные и морские невода (далее закидные равнокрылые невода, или ЗРН) применяются во внутренних и прибрежных водоемах разных стран. У большинства ЗРН имеется следующая базовая конструкция: сетная часть, посаженная сверху и снизу на подборы (канаты), и боковые пожилины. Оснастка верхней подборы представляет собой поплавки (плав), оснастка нижней подборы – загрузка (груза). Сетная часть состоит из крыльев, приводов и мотни (которая может и отсутствовать в безмотенных ЗРН). Одно из крыльев носит название пятного, другое – бежного. Подборы невода заканчиваются приухами,
к которым прикрепляются клячовки. К клячовкам крепятся чалки, а к ним урезы, носящие одноименное название с соответствующим крылом (пятной и бежной урезы) (рис. 1).
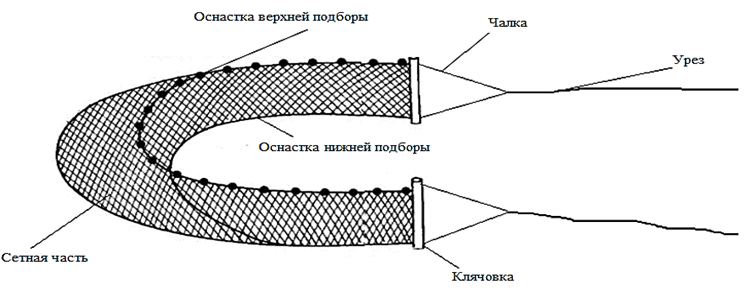
Рис. 1. Закидной равнокрылый невод (озерный, морской)
Fig. 1. The beach winged seine (lacustrine, marine)
Лов ЗРН производится на специальных прибрежных участках, называемых тонями. Длину неводов принимают в зависимости от ширины полосы акватории тони, которую необходимо облавливать (рис. 2).
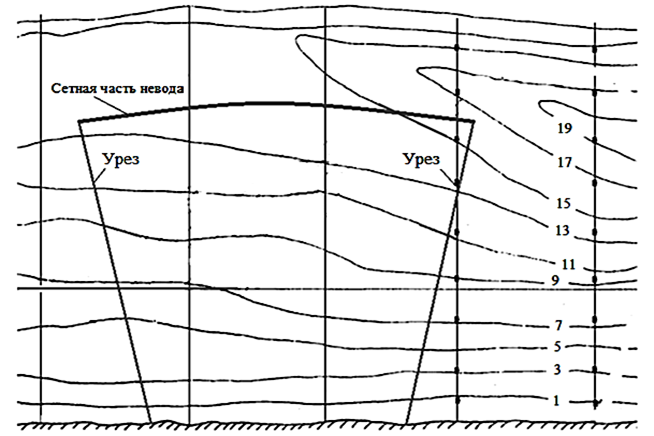
Рис. 2. Батиметрический план тони
Fig. 2. The tony bathymetric plan
В морях эта полоса обычно составляет ширину полосы массового хода рыбы. В процессе лова ЗРН должен перекрывать всю толщу воды, поэтому высота стенки невода по его длине выбирается после изучения специальных батиметрических планов тони, графического построения формы сплывания невода и определения глубин, над которыми проходят разные части сетной стены невода. Тони разделяются на стационарные (лов проводится постоянно), временные (лов проводится только в определенный сезон) и обтяжные (лов проводится эпизодически, нерегулярно). На рис. 3 изображен вид ЗРН сбоку.
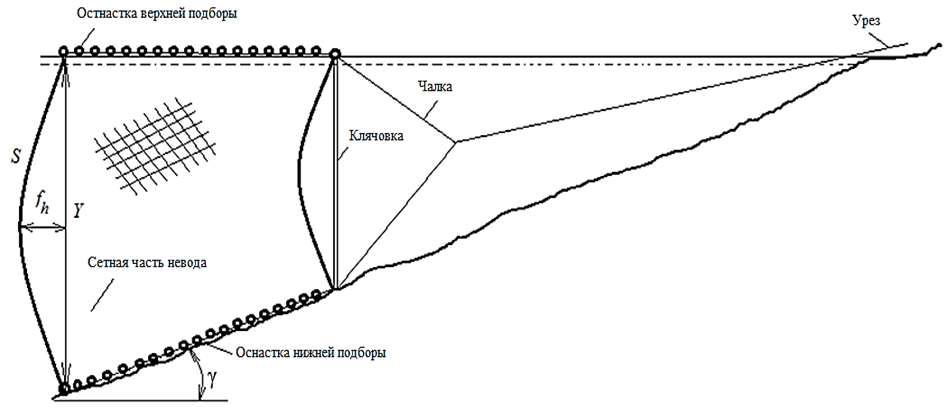
Рис. 3. Закидной равнокрылый невод (озерный, морской), вид сбоку:
S – высота сетной части; fh – стрелка прогиба сетной части (выдувание); Y – глубина места лова;
γ – угол, характеризующий перепад глубин (осредненный)
Fig. 3. The beach winged seine (lacustrine, marine), side view:
S – beach seine height; fh – arrow deflection of the beach seine (blowing); Y – depth of place;
γ – angle characterizing the difference in depths (averaged)
Процесс выборки урезов ЗРН выполняется за два уреза, этот процесс, как правило, механизированный, с помощью лебедок или промысловых механизмов типа турачек. При выборке ЗРН возникает натяжение в урезах, которое принимается одинаковым, но т. к. процесс выборки динамический, то натяжение зависит от многих параметров процесса выборки и характеристик тони. Cвидетельство этому – графики зависимости натяжения в урезе от времени выборки ЗРН [1–3].
Процесс выборки ЗРН сложный, происходит изменение геометрических и силовых характеристик, которые взаимосвязаны и зависят друг от друга. Решение задач такого уровня сложности возможно только с помощью дискретных методов [4], с использованием ЭВМ. Однако в некоторых ситуациях нет возможности воспользоваться ЭВМ для расчета параметров ЗРН, а это не только натяжение в урезе, которое нужно знать для подбора промыслового механизма с учетом его тяги, но и оперативные действия промысловой команды по корректировке оснастки и скорости выборки урезов, а иногда и выполнение конструктивных изменений в сетной части ЗРН.
Постановка задачи
В этой связи возможно с небольшой ошибкой (не более 10 %) определить усилие в ЗРН в процессе выборки урезов на соответствующей тоне на основании квазистатического процесса. Другими словами, мы заменяем динамический процесс на статический. Рассмотрим квазистатический процесс – идеализированный процесс, состоящий из непрерывно следующих друг за другом квазистатических состояний, в которых характеризующие систему величины за время наблюдения не изменяются, если каждое квазистатическое состояние ЗРН близко к состоянию равновесия и скорость выборки урезов небольшая.
Одной из аксиом статики является утверждение, что перенос сил возможен только по линии действия самой силы. Если же определить связь формы ЗРН с действующими силами, то, с учетом уравнения суммы моментов сил относительно точки закрепления урезов, возможно определить геометрические параметры всего ЗРН в целом, при этом следует руководствоваться аксиомой V (принцип отвердевания) механики. Иными словами, равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело отвердеет (станет абсолютно твердым). Равновесие сил, приложенных к деформирующемуся телу – ЗРН, – сохраняется при его затвердевании. Данное условие является необходимым, но недостаточным, и в каждом конкретном случае требуются дополнительные условия. Эти условия и есть временные участки «сплывания» ЗРН. Рассмотрим две схемы выборки урезов ЗРН. Схема выборки ЗРН
с фиксированными лебедками указана на рис. 4, а схема выборки ЗРН с подвижными лебедками указана на рис. 5.
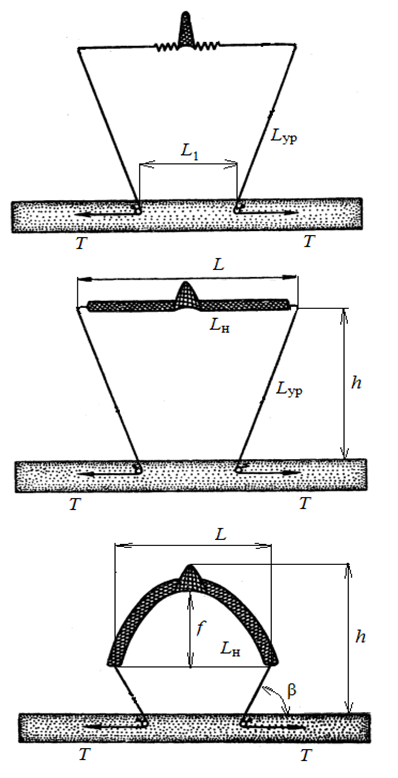
Рис. 4. Схема 1 выборки закидного равнокрылого невода с фиксированными лебедками:
Lур – длина уреза; L1 – расстояние между промысловыми механизмами; T – натяжение в урезе;
L – проекция длины сетной части ЗРН (хорда); Lн – длина сетной части ЗРН; h – горизонт «сплывания» сетной части ЗРН;
f – стрелка прогиба сетной части ЗРН; β – угол между урезом и горизонтальной линией направления натяжения уреза
(уровнем между промысловыми механизмами)
Fig. 4. Scheme 1 sampling of a folding equal-wing seine with fixed winches: Lур – length of the cut; L1 – the distance between fishing mechanisms; T – tension in the cut;
L – projection of the length of the mesh part of the BWS (chord); Lн – length of the mesh part of the BWS;
h – horizon of the “fusion” of the mesh part of the BWS; f – deflection arrow of the mesh part of the BWS;
β – angle between the cut and the horizontal line of the direction of the tension of the cut (the level between the fishing mechanisms)
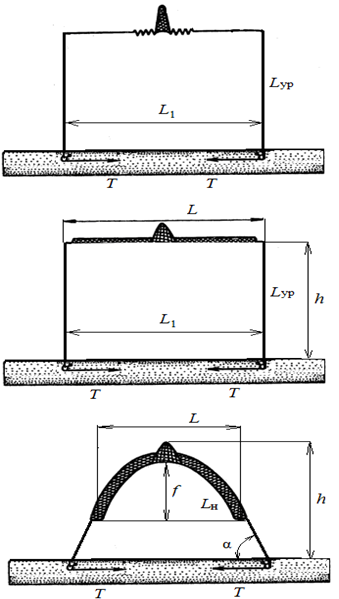
Рис. 5. Схема 2 выборки закидного равнокрылого невода с подвижными лебедками:
α – угол между урезом и горизонтальной линией направления натяжения уреза
(уровнем между промысловыми механизмами), α = 180° – β
Fig. 5. Scheme 2 of sampling of a hinged equidistant seine with movable winches:
α – angle between the edge and of the horizontal line of the direction of the tension of the edge
(level between fishing mechanisms), α = 180° – β
Отметим, что для схемы, приведенной на рис. 4, расстояние между промысловыми механизмами L1 остается неизменным, т. е. тоня стационарная и на берегу установлены блоки для урезов. А на схеме, указанной на рис. 5, расстояние между промысловыми механизмами L1 переменное, т. е. тоня нестационарная и на берегу установлены только промысловые механизмы, которые, как правило, размещены на тракторах или других самоходных машинах.
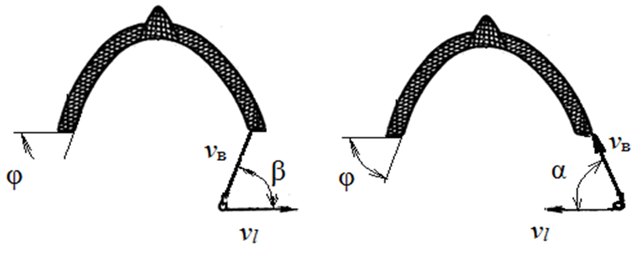
На рис. 6 приведена схема направлений скорости выборки уреза vв и скорости линейной vl для схемы выборки урезов ЗРН.
а б
Рис. 6. Схема направлений скорости выборки уреза vв и линейной скорости vl: а – для схемы 1;
б – для схемы 2; φ – угол касательной в точке соединения клячовки и сетной части,
характеризующий форму цепной линии сетной части ЗРН
Fig. 6. Diagram of the directions of the sampling rate of the cutoff vв and the velocity of the linear vl:
a – for scheme 1; б – for scheme 2; φ – the angle of the tangent at the junction of the klyachovka and the grid part,
characterizing the shape of the chain line of the grid part of the BWS
Методы исследования
Рассмотрим схему 1 выборки урезов ЗРН (см. рис. 3, 4, 6). Условие L1 ≤ L должно выполняться в течение всего процесса выборки урезов и сетной части ЗРН. Примем допущение, что сетная часть ЗРН принимает форму цепной линии (в плане).
Стрелка прогиба f увеличивается с момента начала выборки до ее завершения:
![]()
глубина места лова Y уменьшается и связана выражением
![]() (1)
(1)
проекция длины сетной части ЗРН (хорда) L уменьшается и связана выражением
![]() .
.
Длина уреза Lур уменьшается пропорционально скорости выборки урезов vв:
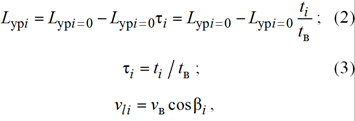
где τi = ti / tв – безразмерное время процесса выборки урезов и сетной части ЗРН, т. е. tв = ti=n; процесс выборки разбит на временные участки i = 0, …, n;
vв – скорость выборки уреза, vв = const; ti – время процесса (переменная величина, от 0 с до tв – времени выборки урезов и сетной части ЗРН); vl – скорость линейная.
Стрелка прогиба f сетной части ЗРН связана с хордой L эмпирическим выражением [5, 6] при условии, что сетная часть ЗРН принимает форму цепной линии (в плане)
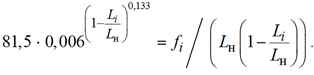 . (4)
. (4)
Провис сетной части ЗРН (см. рис. 3) определяется по выражению
![]() (5)
(5)
Время процесса выборки урезов и сетной части ЗРН определяется по выражению
![]() . (6)
. (6)
Натяжение в урезе Ti определяется по выражению

где Ri – суммарное сопротивление ЗРН, которое определяется по выражению
![]() , (7)
, (7)
где Rxi – гидродинамическое сопротивление сетной части ЗРН; Rгрi – грунтодинамическое сопротивление (трение) оснастки нижней подборы ЗРН;
Rосi – гидродинамическое сопротивление оснастки верхней и нижней подборы ЗРН; r – зацепы, наносы и другое, в данном методе расчета принимается, что r = 0 Н.
Гидродинамическое сопротивление сетной части ЗРН определяется по выражению [7]
 (8)
(8)
где cxi – коэффициент гидродинамического сопротивления сетной части ЗРН; vi – скорость «сплывания» сетной части ЗНР; ρ – плотность воды; Fн – площадь ниток ЗРН.
Скорость «сплывания» vi сетной части ЗНР принимается равным
![]() .
.
Коэффициент гидродинамического сопротивления сетной части ЗРН определяется по выражению [8]
![]() (9)
(9)
выражение (9) справедливо для условий 0,15 ≤ f /
/ Lн ≤ 0,77; 123 ≤ Re ≤ 184; 0,4 ≤ θ ≤ 0,8; 0,168 ≤ Fo ≤ ≤ 0,202; Rei – число Рейнольдса для ниток, определяемое по выражению
![]() ,
,
где υ – коэффициент кинематической вязкости воды; Fo – сплошность сетной части ЗРН, вычисляемая по формуле
 ,
,
где dсв – средневзвешенное значение диаметра ниток сетной части; a – средневзвешенное значение шага ячеи сетной части; ux, uy – посадочные коэффициенты.
Грунтодинамическое сопротивление (трение) Rгрi оснастки нижней подборы определяется по выражению
![]() , (10)
, (10)
где cf i – коэффициент динамического трения (грунтодинамический коэффициент трения) для условий 25,0 ≤ q / d ≤ 300,0 Н/м2; 0º ≤ φ ≤ 90º и 0,2 ≤ v ≤ 1,0 м/с представляет собой выражение [1]
 ,
,
где φi – угол, характеризующий форму цепной линии сетной части ЗРН; d – диаметр нижней подборы (загрузки); q – вес загрузки нижней подборы, Н/м.
Значение угла φi определим по параметрическим уравнениям цепной линии [7]
 .
.
Гидродинамическое сопротивление Rосi оснастки верхней и нижней подборы ЗРН определяется по выражению
 , (11)
, (11)
где cxосi – коэффициент гидродинамического сопротивления деталей оснастки, как правило, представляющей форму шара , т. е.
![]() , (12)
, (12)
где Reoi – число Рейнольдcа для оснастки. Для шара зависимость (12) представим в эмпирическом виде [1]:
 ,
,
где D – диаметр оснастки в виде шара (плав, загрузка); ϑ – коэффициент кинематической вязкости воды.
Если форма плава и загрузки представляет собой цилиндр, то следует воспользоваться соответствующими формулами [7].
Рассмотрим схему 2 выборки урезов ЗРН (рис. 3, 5, 6). Условие L ≠ const должно выполняться в течение всего процесса выборки урезов и сетной части ЗРН. Примем допущение, что сетная часть ЗРН принимает форму цепной линии (в плане).
Стрелка прогиба f увеличивается с момента начала выборки до его завершения
![]() . (13)
. (13)
Глубина места лова Y уменьшается и связана выражением (1). Проекция длины сетной части ЗРН (хорда) L уменьшается и связана выражением
![]() . (14)
. (14)
Расстояние между промысловыми механизмами (переменная величина) L1 уменьшается:
![]() . (15)
. (15)
Длина уреза Lур уменьшается пропорционально скорости выборки урезов vв и определяется по выражениям (2) и (3). Скорость линейная определяется по формуле
![]() . (16)
. (16)
Стрелка прогиба f сетной части ЗРН связана с хордой L эмпирическим выражением (4). Провис сетной части ЗРН (см. рис. 3) определяется по выражению (5). Время процесса выборки урезов и сетной части ЗРН определяется по выражению (6).
Натяжение в урезе Ti определяется по выражению
 , (17)
, (17)
где Ri определяется по выражению (7). Гидродинамическое сопротивление сетной части ЗРН определяется по выражению (8).
Скорость «сплывания» vi сетной части ЗНР принимается равной
![]() . (18)
. (18)
Коэффициент гидродинамического сопротивления сетной части ЗРН определяется по выражению (9). Грунтодинамическое сопротивление (трение) Rгрi оснастки нижней подборы определяется по выражению (10). Гидродинамическое сопротивление Rосi оснастки верхней и нижней подборы ЗРН определяется по выражению (11).
Площадь облова для схемы 1 определим по выражению [9, 10]
![]() ,
,
площадь облова для схемы 2:
![]() (19)
(19)
Для примера рассмотрим расчет геометрических и силовых характеристик невода морского (ЗРН) 451 × 4,5 м (рис. 7).
Рис. 7. Невод морской (ЗРН) 451 × 4,5 м
Fig. 7. Beach seine (BWS) 451 × 4.5 m
Основные конструктивные, геометрические и силовые параметры ЗРН 451 × 4,5 м приведены в табл. 1.
Таблица 1
Table 1
Основные конструктивные, геометрические и силовые параметры ЗРН 451 × 4,5 м
The main structural, geometric and force parameters of the BWS 451 × 4.5 m
|
Длина сетной части |
Высота |
Площадь |
Средневзвешенная сплошность Fo, безразмерная |
Плавучесть оснастки верхней |
Загрузка |
|
451,0 |
4,5 |
365,3 |
0,18 |
5,85 |
6,39 |
Примем, что величины: Rгрi = 0 Н; Rосi = 0 Н и r = 0 Н, т. к. суммарное сопротивление оснастки и заносов составляет не более 10 % при малых размерах оснастки и малой скорости выборки урезов ЗРН. Выборка ЗРН выполняется по схеме 2. Воспользуемся соответствующими формулами и выражениями для расчета геометрических и силовых характеристик ЗРН. Выборка урезов происходит синхронно.
Батиметрический план тони Северного Каспия приведен на рис. 8.
Рис. 8. Батиметрический план тони Северного Каспия
Fig. 8. The Northern Caspian tony bathymetric plan
Результаты и обсуждение
С учетом формул и выражений для расчета геометрических и силовых характеристик ЗРН (схема выборки 2) (1)–(9), (13)–(19) отобразим основные характеристики ЗРН в табл. 2 при скорости выборки vв = 0,2 м/с.
Таблица 2
Table 2
Основные геометрические и силовые характеристики ЗРН 451 × 4,5 м
The main geometric and force characteristics of the BWS 451 × 4.5 m
|
Длина урезов Lур м |
Площадь облова (максимальная) FЗРН2 км2 |
Скорость |
Время |
Максимальное натяжение уреза T, кН |
|
500 |
0,5 |
0,2 |
42 |
1,8 |
На графиках рис. 9 и 10 покажем зависимости T = f(t) и T = f(Y).
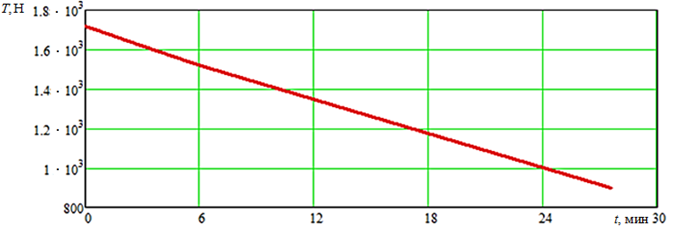
Рис. 9. График зависимости T = f(t)
Fig. 9. Dependence graph T = f(t)
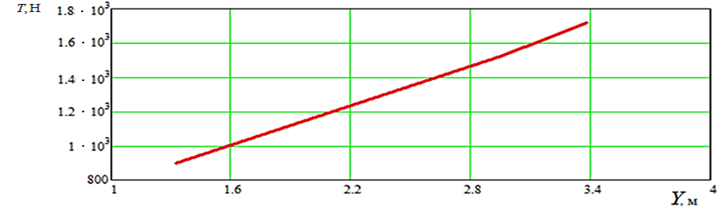
Рис. 10. График зависимости T = f(Y)
Fig. 10. Dependence graph T = f(Y)
Наблюдается снижение натяжение уреза при увеличении времени выборки.
Заключение
Процесс выборки ЗРН сложный, происходит изменение геометрических и силовых характеристик, которые взаимосвязаны и зависят друг от друга. Решение задач такого уровня сложности возможно только с помощью дискретных методов, используя ЭВМ. Однако в некоторых ситуациях нет возможности воспользоваться ЭВМ для расчета параметров ЗНР, а это не только натяжение в урезе, которое нужно знать для подбора промыслового механизма с учетом его тяги, но и оперативные действия промысловой команды по корректировке оснастки и скорости выборки урезов, а иногда и выполнени е конструктивных изменений в сетной части ЗНР. В этой связи возможно с небольшой ошибкой (не более 10 %) определить усилие в ЗРН в процессе выборки урезов на соответствующей тоне на основании квазистатического процесса. В статье приведен метод расчета геометрических и силовых характеристик ЗРН, а также приведен пример расчета ЗРН 451 × 4,5 м, эксплуатируемого при облове гидробионтов Северного Каспия.
1. Недоступ А. А., Соколова Е. В. Экспериментальные исследования геометрических и силовых характеристик модели закидного невода // Вестн. Астрахан. гос. техн. ун-та. Сер.: Рыбное хозяйство. 2013. № 2. С. 122-129.
2. Недоступ А. А., Ражев А. О., Соколова Е. В. Постановка задачи создания математической модели озерного закидного невода // Изв. Калининград. гос. техн. ун-та. 2015. № 36. С. 73-80.
3. Nedostup A. A., Razhev A. O., Sokolova E. V. The hydrodynamics of the lake beach seine // Contributions on the theory of fishing gears and related marine systems DEMAT 2015: 12th International workshop (Scotland, Aberdeen). 2015. V. 9. P. 193-202.
4. Недоступ А. А., Ражев А. О., Соколова Е. В. Моделирование озерных закидных неводов методом конечных элементов // Рыбное хозяйство. 2016. № 2. С. 96-99.
5. Недоступ А. А. Методы расчета пассивных сетных орудий внутреннего и прибрежного рыболовства: моногр. Калининград: Изд-во КГТУ, 2010. 280 с.
6. Кручинин О. Н. Тактика замета кошелькового не-вода и способы управления поведением рыб в зоне облова. Владивосток: ТИНРО-центр, 2006. 127 с.
7. Розенштейн М. М., Недоступ А. А. Задачник по механике орудий рыболовства. М.: Моркнига, 2011. 256 с.
8. Соколова Е. В., Недоступ А. А., Коротков В. К., Головин Е. Р. Экспериментальное исследование моделей закидных неводов в гидроканале ОАО «МариНПО» // Вестн. Астрахан. гос. техн. ун-та. Сер.: Рыбное хозяйство. 2019. № 1. С. 28-37.
9. Мельников В. Н. Устройство орудий лова и технология добычи рыбы. М.: Агропромиздат, 1991. 385 с.
10. Козлов В. И. Справочник фермера-рыбовода. М.: Изд-во ВНИРО, 1998. 342 с.
