












Россия
Россия
При построении системы электродвижения судна предъявляются повышенные требования к надежности и эффективности гребного электропривода, питающегося от автономной системы электроснабжения соизмеримой мощности. В частности, поднимается вопрос об ограничении и стабилизации скорости, потребляемого тока и, соответственно, потребляемой мощности гребного двигателя в условиях изменяющегося момента нагрузки. В случае, если система регулирования не способна обеспечить перечисленные требования, нарушается нормальная работа дизель-генераторной установки вплоть до глушения, снижается эффективность потребления топлива и срок службы генератора. Наилучшим решением является непосредственное регулирование потребляемой активной мощности и адаптация системы регулирования к изменениям момента нагрузки. Разработана новая, отличающаяся от известных, структура системы управления гребным синхронным электроприводом, которая включает в свой состав контур активной мощности и адаптивный регулятор скорости. На основе структурной схемы разработана имитационная модель гребного синхронного электропривода в программном пакете Simulink графической среды имитационного моделирования MatLab. Произведено моделирование работы гребного синхронного электропривода в условиях качки с оголением гребного винта, а также пуска, реверса и останова в нормальных условиях. Произведен сравнительный анализ гребного синхронного электропривода с предложенной системой управления и с классической системой управления с внешним контуром скорости. Приведенные результаты моделирования подтверждают, что разработанная система управления адаптивна к условиям, характеризующимся колебаниями момента нагрузки при сильной качке, а также позволяет регулировать потребляемую приводом активную мощность и ограничивать ее броски в переходных режимах.
адаптивное регулирование, гребной винт, синхронный электропривод, векторное управление, имитационное моделирование, система электродвижения судна
Введение
Частотно-регулируемый синхронный электропривод широко распространен в промышленности и на транспорте. В частности, электропривод на основе синхронного двигателя применяется в судовых системах электродвижения [1–6].
Особенности данного типа электропривода:
– мощность электропривода соизмерима с мощ-ностью судовой электрической сети;
– вентиляторный характер нагрузки;
– необходимость применения тихоходных двигателей большой мощности.
Ввиду того, что мощность гребного электропривода соизмерима с мощностью судовой электрической сети, резкие броски потребляемой активной мощности могут стать причиной глушения дизельного двигателя, приводящего во вращение генератор. Также необходимо учитывать, что в условиях сильной качки на воде гребной винт оголяется и не совершает полезной работы, поэтому настроенная на нормальный режим система регулирования в моменты нулевой нагрузки может перейти в режим неустойчивой работы.
Превышение допустимой нагрузки электрического генератора, питающего гребной электродвигатель, в течение длительного времени может вызвать перегрев коллектора и обмоток генератора с соответствующими негативными последствиями. Поэтому требования к системе управления гребным электроприводом следующие:
– контроль и ограничение мощности, потребляемой приводом из судовой сети;
– обеспечение оптимального управления синхронной машиной в условиях сильно изменяющейся нагрузки;
– повышенная надежность.
С целью выполнения вышеприведенных требований авторами разработана структурная схема гребного синхронного электропривода, система регулирования которого включает в свой состав контур активной мощности и адаптивный регулятор скорости.
Структура системы управления гребного синхронного электропривода
При разработке имитационной модели гребного синхронного электропривода были приняты следующие допущения:
– в качестве двигателя применена неявнополюсная синхронная машина с постоянными магнитами на роторе;
– не учитывается инерционность преобразователя частоты в составе электропривода, ввиду того что его постоянная времени относительно мала;
– уменьшен момент инерции электродвигателя в 10 раз с целью ускорения процесса компьютерного моделирования.
Номинальная мощность синхронного электродвигателя – 4,65 МВт, число пар полюсов – 5.
Модель синхронного электропривода с векторной системой управления построена во вращающейся синхронно с полем ротора системе координат d–q [7]. Векторное управление применено в рассматриваемом электроприводе, т. к. данный тип управления позволяет вычислять значение момента на валу двигателя, а также его активную мощность, что необходимо для построения контура активной мощности. Разработанная структура системы управления гребным синхронным электроприводом представлена на рис. 1.

Рис. 1. Структурная схема гребного синхронного электропривода
Fig. 1. The structure of the rowing electric drive control system
Система управления и регулирования синхронным электроприводом построена на основе принципа подчиненного регулирования и содержит два внутренних параллельных контура тока с блоком компенсации перекрестных связей, контур скорости и контур активной мощности. Так как скорость движения судна напрямую зависит от механической мощности на валу, целесообразно в качестве внешнего контура регулирования использовать контур активной мощности.
Момент нагрузки гребного электропривода пропорционален квадрату скорости вращения гребного винта и коэффициенту нагрузки, зависящему от параметров среды. В условиях сильной качки на воде этот коэффициент сильно меняется, особенно когда гребной винт частично или полностью оголяется. Также значение коэффициента нагрузки изменяется при наличии ледниковой каши. Для учета влияния этого изменения на работу контура скорости электропривода применен адаптивный регулятор скорости.
На основании структуры, представленной на рис. 1, в программной среде MatLab Simulink [8, 9] была разработана имитационная модель гребного синхронного электропривода (рис. 2). Структура адаптивного регулятора скорости с контуром активной мощности гребного синхронного электропривода представлена на рис. 3.
На рис. 4 представлена структура блока, посредством которого выполняется имитация вентиляторного момента нагрузки гребного винта в нормальном ходовом режиме и в условиях качки. Также в этом блоке производится вычисление коэффициента нагрузки на основании уравнения второго закона Ньютона для вращательного движения и уравнения зависимости момента двигателя от тока Iq. Значение этого коэффициента используется для корректирования коэффициентов регулятора скорости.

Рис. 2. Имитационная модель гребного синхронного электропривода
Fig. 2. The simulation model of the rowing synchronous electric drive

Рис. 3. Структура адаптивного регулятора скорости с контуром активной мощности
Fig. 3. The structure of the adaptive controller of speed with active power circuit

Рис. 4. Структура блока имитации вентиляторного момента и вычисления коэффициента вентиляторной нагрузки
Fig. 4. The structure of the block for simulating the fan torque and calculating the fan load
Так как аналитическое выражение коэффициентов регуляторов для рассматриваемой системы управления ввиду ее сложности получить практически невозможно, то следует прибегнуть к методам подбора [10]. Посредством методом Циглера – Никольса были определены коэффициенты регуляторов токов, скорости и мощности.
Результаты имитационного моделирования гребного синхронного электропривода
На рис. 5 представлены результаты имитационного моделирования работы гребного синхронного электропривода на вентиляторную нагрузку с косинусоидальным изменением коэффициента нагрузки при оголении гребного винта на 4-й с (wзад – задание скорости, о. е.; w – текущая скорость двигателя, о. е.).

а

б

в
Рис. 5. Временные диаграммы гребного синхронного электропривода в условиях качки:
а – с классическим регулятором; б – с уменьшенными коэффициентами классического регулятора;
в – с адаптивным регулятором
Fig. 5. Time diagrams of a rowing electric drive in pitching conditions:
а – with a classic regulator; б – with reduced coefficients of a classic regulator; в – with an adaptive regulator
При использовании классического регулятора скорости при уменьшении коэффициента нагрузки система теряет устойчивость (рис. 5, а). Для предотвращения данного эффекта приходится уменьшать коэффициенты регулятора, однако это увеличивает время переходного процесса при нормальном режиме нагрузки (рис. 5, б). А при использовании адаптивного регулятора его коэффициенты автоматически подстраиваются под изменения коэффициента нагрузки, обеспечивая стабильное поддержание скорости электропривода с незначительным колебательным процессом в момент оголения винта (рис. 5, в).
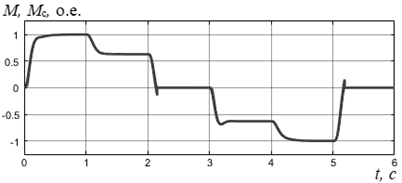
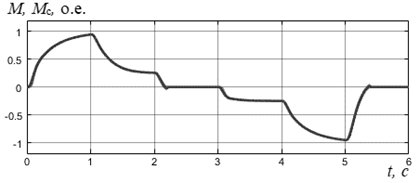
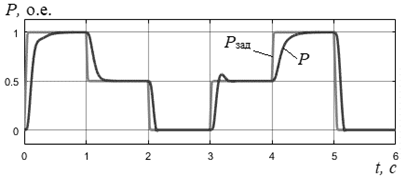
На рис. 6 представлены переходные процессы при пуске на полный ход, при переходе на средний ход, при реверсе и останове гребного двигателя при нормальных условиях нагрузки (Р – механическая мощность на валу двигателя, о. е.; Pзад – задание мощности, о. е.; М – электромагнитный момент двигателя, о. е.; Мс – момент нагрузки, о. е.).
|
1 |
 |
 |
|
2 |
 |
 |
|
3 |
 |
 |
|
|
а |
б |
Рис. 6. Переходные процессы скорости (1), электромагнитного момента (2) и механической мощности (3)
при пуске, реверсе и останове гребного синхронного электропривода:
а – с адаптивным регулятором скорости и контуром активной мощности;
б – с классическим регулятором скорости и пониженными коэффициентами
Fig. 6. Transients of speed (1), electromagnetic torque (2) mechanical power (3)
during start-up, reverse and stop of the electric drive:
а – with adaptive speed control and active power circuit; б – with classic speed control and reduced coefficients
Система регулирования скорости с классическим регулятором с уменьшенными коэффициентами имеет гораздо более длительное время переходного процесса (рис. 5, б) (0,8 с), чем разработанная система управления с адаптивным регулятором скорости и контуром активной мощности (рис. 5, а) (0,4 с), которая обеспечивает более быстрый и стабильный выход на заданные значения без превышения потребления активной мощности и максимально допустимой скорости электропривода.
Заключение
Анализ результатов имитационного моделирования свидетельствует о том, что предложенный вариант системы управления гребного синхронного электропривода обеспечивает регулирование потребляемой двигателем мощности, ограничение ее бросков выше 105 % от номинального уровня, а также адаптацию к изменениям нагрузки в условиях качки и оголения гребного винта, что повышает надежность работы гребного синхронного электропривода при питании от судовой сети соизмеримой мощности.
1. Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. М.: Академия, 2006. 265 с.
2. Дарьенков А. Б., Титов В. Г., Мирясов Г. М., Умяров Д. В. Гребные электрические установки: учеб. пособие. Н. Новгород: Изд-во НГТУ им. Р. Е. Алексеева, 2015. 207 с.
3. Тихомиров В. А., Титов В. Г., Хватов С. В. Технические и экономические аспекты применения регулируемых приводов постоянного и переменного тока // Тр. Нижегород. гос. техн. ун-та им. Р. Е. Алексеева. 2010. № 4 (83). С. 190–204.
4. Птах Г. К. Обзор гребных электроустановок и обоснование выбора десятифазного индукторного электродвигателя мощностью 15 МВт для системы электродвижения атомных ледоколов // Изв. вузов. Электромеханика. 2020. Т. 63. № 1. С. 5–18. DOIhttps://doi.org/10.17213/0136-3360-2020-1-5-18.
5. Терехов В. М., Осипов О. И. Системы управления электроприводов: учеб. М.: Академия, 2005. 304 c.
6. Гельвер Ф. А., Белоусов И. В., Самосейко В. Ф. Гребные электрические установки судов большой мощности // Вестн. Перм. нац. исслед. политехн. ун-та. Электротехника, информационные технологии, системы управления. 2019. № 30. С. 7–27.
7. Калачев Ю. Н. Векторное регулирование (заметки практика). М.: Изд-во МЭИ, 2013. 72 с.
8. Дьяконов В. П. MATLAB. Полный самоучитель. М.: ДМК Пресс, 2012. 768 с.
9. Дьяконов В. П. Simulink 5/6/7: самоучитель. М.: ДМК Пресс, 2008. 784 с.
10. Вадутов О. С. Настройка типовых регуляторов по методу Циглера – Никольса: метод. указ. к выполнению лаб. работы для студентов, обучающихся по направлениям 210100 «Электроника и наноэлектроника» и 201000 «Биотехнические системы и технологии». Томск: Изд-во ТПУ, 2014. 10 с.
