












Russian Federation
The role and place of satellite navigation systems in modern navigation are considered, an overview of the currently existing global navigation satellite systems is presented, and the dominant role of the American GPS system in civil navigation is outlined. The features of the use of the GPS satellite system in the context of armed conflicts of recent decades are analyzed and possible cases of its failure in the context of the modern sharply aggravated military and political situation are substantiated. The subsequent negative impact of such failures on the navigation safety of navigation has been determined. The related urgent problems of modern navigation and their solutions based on new principles of obtaining, processing and analyzing astronomical information by means and methods of nautical astronomy, which are completely autonomous and can be used in any areas of the World Ocean, are outlined. The urgent need to equip civilian vessels with alternative GPS backup high-tech navigation equipment using modern methods of nautical astronomy has been identified, which should be taken into account both during the construction of new vessels and during the modernization of existing ones. The successful experience of obtaining, processing and analyzing astronomical information, as well as the creation and application of various automated astronomical navigation systems based on it in the Russian Navy is analyzed. Conclusions are drawn about the necessity and possibility of designing such high-tech digital astrogation devices for ships of the Civil fleet and their inclusion in the onboard navigation equipment. The main technical and methodological directions of promising developments are outlined.
ship navigation equipment, navigation safety, global navigation satellite system, means and methods of nautical astronomy, ship celestial navigation system
Введение
Современное судовождение невозможно представить без использования глобальных навигационных спутниковых систем (ГНСС), прежде всего американской GPS. Использование в судовождении отечественной ГНСС – ГЛОНАСС, европейской ГНСС «Галилео» и китайской «Бейдоу-2» носило достаточно ограниченный характер.
Высокая точность, надежность и достаточная простота эксплуатации судовой аппаратуры спутниковой навигации обусловили отказ от использования наземных радионавигационных систем и береговых радиомаяков. Вполне возможный по различным причинам выход из строя системы спутниковой навигации может оказаться катастрофическим для находящихся в море судов [1]. Предпосылками для этого могут быть возможные технические сбои, сильная солнечная активность, посторонние электромагнитные сигналы, умышленная фальсификация данных GPS в связи с проведением кибератак [2], диверсионных актов или военных операций [3], технические сбои и сильная солнечная активность [4].
Влияние первых трех причин можно компенсировать или минимизировать теми или иными методами и средствами. Последнюю причину на судне устранить невозможно. Возможность ее появления значительно повысилась в последние десятилетия, что подтверждается опытом использования американской GPS во всех военных конфликтах, где напрямую или опосредованно участвуют США, особенно в зоне проведения специальной военной операции и прилегающих к ней районах. Помимо этого, в рамках концепции так называемой «навигационной войны» структура GPS позволяет ограничивать работу GPS в определенных районах Земли, а при необходимости полностью ее блокировать для нежелательных, с точки зрения руководства США, пользователей, в числе которых вполне вероятно появление российских гражданских судов и судов дружественных стран.
Возможность использования системы спутниковой навигации над определенной акваторией Мирового океана может быть затруднена подавлением навигационных сигналов системами радиоэлектронной борьбы с целью ее вывода из строя для блокирования систем наведения высокоточных систем вооружения. В этих условиях для обеспечения решения задач судовождения и достижения при этом должного уровня навигационной безо-пасности совершенно очевидна необходимость наличия на судне надежного и доступного в любом районе Мирового океана и в любое время суток резервного средства навигации. Таким доступным в любом районе Мирового океана, абсолютно автономным и достаточно точным резервным средством навигации является мореходная астрономия, которая в случае необходимости вполне может минимизировать последствия сбоев в работе ГНСС [5].
Для использования небесных светил астрономии в целях судовождения применяются определенные средства и методы. Следует отметить, что за последнее время в гражданском судовождении каких-то кардинальных изменений в практике повышения эффективности применения этих средств и методов не произошло. Можно, конечно, отметить отдельные, достаточно ценные работы, направленные прежде всего на процесс автоматизации астронавигационных вычислений. В качестве примера можно привести электронный альманах МАЕ (Государственный научно-исследовательский институт навигации и океанографии), интерактивную систему удаленного доступа «Штурман» и комплекс PersAY (Институт прикладной астрономии Российской академии наук), программный комплекс StarCalc (А. Завалишин), «Астрономический альманах» (И. Бровина), Astromical Almanac (С. Козин, А. Денисова, Г. Алцибеев) и ряд других разработок [6]. Однако принятые меры в целом не позволяют устранить главные недостатки «классической» мореходной астрономии.
На протяжении трех столетий мореплаватели всех типов судов использовали для измерения астронавигационных параметров любимый многими судоводителями астрономический измерительный прибор – навигационный секстан, который и в современном мире оказался достаточно востребованным. Однако существующие недостатки прибора не могут в полной мере гарантировать безопасность судовождения. К ним относятся:
– традиционный навигационный секстан позволяет определять только высоту светила в качестве астронавигационного параметра;
– днем возможны только измерения высоты Солнца;
– невозможность выполнить измерения ночью, в условиях ограниченной видимости и при сильной облачности;
– выполнение полноценных измерений традиционным навигационным секстаном должно выполняться только оператором с уверенными умениями и навыками работы с прибором;
– процесс измерений с помощью навигационного секстана производится вручную, автоматизации измерений при его применении не предусмотрено.
Вероятность использования навигационного секстана для измерений астронавигационных параметров в течение суток, по данным различных исследований, не превышает 7–10 % [7].
Существующие в настоящее время на судах флота методы обработки полученной астронавигационной информации в большинстве случаев предусматривают применение классических астронавигационных пособий, таких как «Мореходные таблицы», «Морской астрономический ежегодник», The Nautical Almanac и др., и в целом не обеспечивают выполнения современных требований к точности судовождения. В этих условиях разработка и внедрение нового навигационного оборудования на основе применения в нем новых средств и методов мореходной астрономии является актуальной научно-технической задачей. Значительную помощь в этом может оказать достаточно большой опыт, накопленный в отечественном военно-морском флоте в части создания и применения различных автоматизированных астронавигационных систем.
Новизна работы заключается в предложении применения имеющегося в отечественном военно-морском флоте опыта в целях разработки и внедрения автоматизированной астронавигационной системы для судов гражданского флота.
Целью данной работы является определение основных направлений работы и предложение общей структурной схемы перспективной судовой астронавигационной системы.
Краткий анализ опыта создания и внедрения автоматизированных астронавигационных систем в отечественном военно-морском флоте
Указанные выше недостатки «классической» мореходной астрономии впервые в 40-х гг. прошлого столетия пытались устранить в Германии путем разработки секстана с искусственным гироскопическим горизонтом. Такой секстан позволял выполнять измерения высот светил от искусственного горизонта, что позволяло применять его ночью при отсутствии видимости линии видимого горизонта.
По трофейным образцам был разработан первый секстан с искусственным горизонтом отечественного производства ГИМС-3, который был взят за основу для создания новых приборов – зенитных перископов с астроизмерительными устройствами для использования на подводных лодках. Дальнейшие разработки велись для усовершенствования подобных приборов, предназначенных для подводных ракетоносцев, вооруженных баллистическими ракетами. Первые образцы астронавигационных перископов «Лира-I» и «Лира-II» были разработаны в 1960 г. и вошли в состав навигационных комплексов «Плутон» и «Сила-Н». В 1964 г. на основе глубокой модернизации «Лиры-II» появилась астронавигационная система «Сегмент», которая вошла в состав навигационного комплекса «Сигма» [8]. При этом вероятность применения средств и методов мореходной астрономии для установления координат судна и поправки указания курса в течение суток увеличилась до 40–50 %.
Одновременно с усовершенствованием оптических средств велись разработки радиоастронавигационных систем. Первый радиосекстан «Самум», работающий в радиодиапазоне, был включен в состав навигационного комплекса «Сигма». Таким образом, совместное использование оптического и радиоканала увеличило вероятность применения мореходной астрономии в течение суток для определения места и поправки курсоуказания почти до 100 % [9].
Появление на вооружении подводных лодок отечественного военно-морского флота баллистических ракет межконтинентальной дальности потребовало внедрения более точных средств выработки координат места [10], в том числе и астрономических.
Значительным трансформациям подверглись технологии астронавигационных измерений в оптическом диапазоне, как через традиционную систему оптических призм, так и с применением телевизионного канала измерений. Это позволило обеспечить измерения астронавигационных параметров небесных светил в дневное время наблюдения слабых звезд – до четвертой величины в ночное время, отслеживание светил звезд в разрывах облаков при засвечивании в условиях насыщенной активности Солнца. Таким образом, объективная возможность навигационного измерения только в оптическом диапазоне достигла 70 %.
С 1964 г. велись научные исследования по разработке оптического перископного астрокорректора для навигационного комплекса «Тобол». В 1972 г. первый экземпляр астрокорректора «Волна» был принят на вооружение. В последующем были разработаны и введены в эксплуатацию и другие автоматизированные системы [11], некоторые из них находятся на вооружении кораблей военно-морского флота и сегодня (табл. 1).
Таблица 1
Table 1
Автоматизированные системы для подводных лодок отечественного военно-морского флота
Automated systems for submarines of the Russian Navy
|
Год |
Прибор |
Навигационный комплекс (НК), проект (пр.) |
|
1972 |
Астрокорректор «Волна» |
НК «Тобол». Пр. 667АУ, пр. 667АМ, пр. 667Б, пр. 667БД |
|
1972 |
Радиооптический секстан «Сайга» |
НК «Тобол». Пр. 667АУ, пр. 667АМ, пр. 667Б, пр. 667БД |
|
1974 |
Астрокорректор «Заря» |
НК «Шлюз». Пр. 667БДР, пр. 667БДРМ, |
|
1976 |
Радиоастронавигационная система «Снегирь» |
НК «Шлюз». Пр. 667БДР, пр. 667БДРМ |
|
1980 |
Радиоастронавигационный комплекс «Салют» |
НК «Симфония-0102». Пр. 941 |
|
1980–1990 |
Радиоастронавигационный комплекс «Мачта-3» и «Мачта-3.1» |
НК «Симфония-3» и «Симфония-3.1». Пр. 941 |
Применительно к системам оптического диапазона были внедрены сначала аналоговые, а затем и цифровые телевизионные приемные системы, применительно к радиоастрономическим системам – метод так называемой пространственно-частотной фильтрации. В каждой последующей системе совершенствовалась элементная база и программное обеспечение.
Для надводных кораблей и судов военно-мор-ского флота такие системы создавались, как правило, на базе уже имеющихся изделий для подводных лодок с учетом специфики их применения только в надводном положении (табл. 2).
Впервые радиооптический секстан «Сура 595» был установлен на командно-измерительном комплексе «Владимир Комаров» в составе навигационного комплекса «Сож 595» [12].
Применение современных методов измерения и обработки астронавигационной информации позволило повысить в отечественном военно-морском флоте точность определения координат на уровень, намного превышающий точность «классической» мореходной астрономии.
Таблица 2
Table 2
Автоматизированные системы для надводных кораблей и судов отечественного военно-морского флота
Automated systems for surface ships and vessels of the Russian Navy
|
Год |
Прибор |
Навигационный комплекс (НК), корабль |
|
1967–1968 |
Радиооптический секстан «Сура 595» |
НК «Сож 595», командно-измерительный |
|
1976 |
Радиоастронавигационная система «Нарва» |
НК «Салгир-1143», крейсер «Киев» |
|
1990 |
Оптический астропеленгатор «Чакона-Б» |
НК «Бейсур-4342М», крейсер «Адмирал Кузнецов» |
|
1996 |
Радиоастронавигационный комплекс «Салют» |
НК «Бейсур-4342М», крейсер «Петр Великий» |
Основные направления работы
Накопленный в военно-морском флоте [13] опыт целесообразно использовать для разработки и организации серийного производства оптимальной с точки зрения решаемых задач и стоимости автоматизированной астронавигационной системы, предназначенной для гражданских судов.
К настоящему времени такая работа в должном объеме пока не организована, что обусловлено следующими причинами:
– сложившейся переоценкой возможностей спутниковой навигации в судовождении без учета возможностей ее отказа;
– сложившимся в условиях ожидания бесперебойной работы спутниковой навигации определенным пренебрежением мореходной астрономии;
– необходимостью достаточно долгосрочных и крупных капиталовложений;
– определенной закрытостью данных по структуре и возможностям систем военно-морского флота;
– существенными габаритными размерами систем военно-морского флота, особенно первых поколений.
Однако развитие вычислительной, телевизионной и гироскопической техники и технологий ее массового производства ведет к существенному снижению ее стоимости, что вполне позволяет создать с учетом опыта военно-морского флота высокоэффективную и относительно недорогую автоматизированную астронавигационную систему для судов гражданского флота.
В отличие от специализированных астронавигационных систем военно-морского флота, предназначенных в первую очередь для обеспечения применения корабельного оружия, судовая астронавигационная система должна отвечать ряду специфических требований.
С точки зрения судостроения к ним относятся:
– максимально возможное снижение стоимости;
– универсальность и возможность установки на судне любого назначения;
– перспектива совмещения системы и имеющегося на судне навигационного оборудования;
– применение освоенных промышленностью технических элементов и математического обеспечения;
– возможность учета спецификации конкретного судна за счет модульности конструкции.
С точки зрения судовождения к ним относятся:
– возможность измерения нескольких астронавигационных параметров, как в оптическом диапазоне, радио- или инфракрасном диапазоне, что позволит выполнять измерения в любое время суток и в любых гидрометеорологических условиях;
– измерения астронавигационных параметров должны быть полностью автоматизированы;
– обработка полученной астронавигационной информации должна быть полностью автоматизирована без использования традиционных пособий с возможностью необходимого периодического обновления астрономических констант;
– система должна иметь возможность автономного определения и хранения точного времени;
– программное обеспечение должно обеспечивать работу системы в диалоговом режиме с максимальной простотой эксплуатации и графическим отображением полученных результатов.
Для этого астронавигационная система должна решать следующие основные задачи:
– вырабатывать плоскость искусственного горизонта;
– выполнять автоматизированный расчет экваториальных и горизонтных координат светил;
– выполнять автоматизированное наведение на светило измерительного устройства;
– выполнять автоматизированные измерения одного или нескольких астронавигационных параметров;
– обрабатывать полученную астронавигационную информацию в реальном масштабе времени и автоматически решать задачи определения места судна и определения поправки курсоуказания;
– графически отображать результаты этой обработки и автоматически передавать их результаты в систему автоматического счисления.
Обобщая эти требования и опираясь на рассмотренный опыт создания и развития астронавигационных систем в отечественном военно-мор-ском флоте, определим состав структурной схемы автоматизированной судовой астронавигационной системы [14] (рис. 1):
– устройство для выработки плоскости истинного горизонта – система гироскопической стабилизации;
– гиростабилизированная в плоскости истинного горизонта платформа с смонтированным на ней измерительным устройством или устройствами;
– вычислительное устройство для решения астрономических задач и управления системой в целом;
– устройство отображения информации.
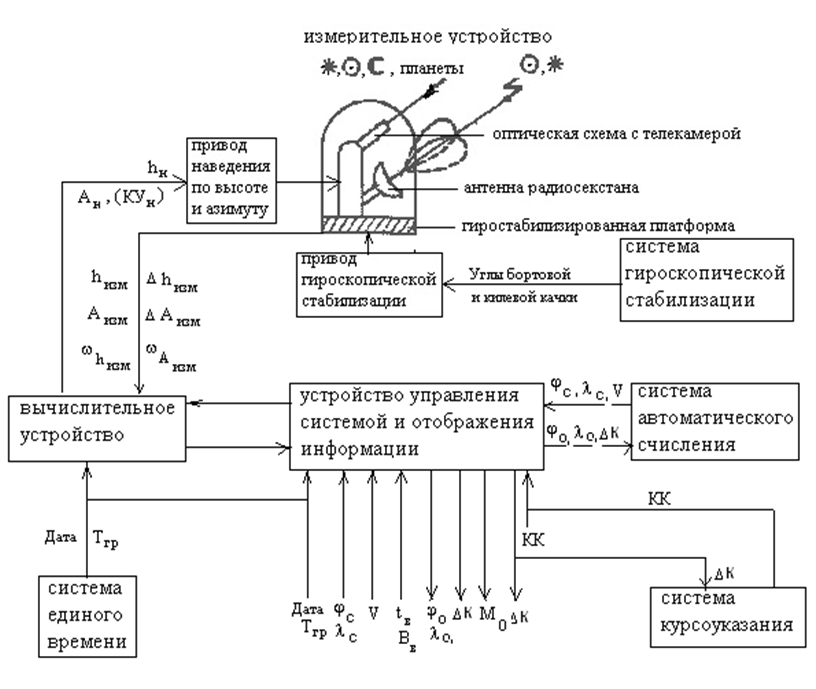
Рис. 1. Общая структурная схема перспективной судовой астронавигационной системы
Fig. 1. General structural diagram of a promising ship-based astrogation system
Создание подобной системы должно базироваться на развитии нескольких направлений мореходной астрономии.
Первое направление предусматривает создание инновационных средств измерения астронавигационных параметров.
Для измерений в оптическом диапазоне стандартные линзы астронавигационных систем первого и второго поколений могут успешно заменить оптронные системы на базе видеокамеры, что позволит значительно снизить габариты, массу и стоимость измерительного устройства. Кроме того, благодаря панкратической оптической системе, лежащей в основе оптронного устройства, допустимо менять поле зрения, приближая, меняя угол объектов, и транслировать изображение на терминал управления.
Наиболее совершенным и перспективным является использование в оптическом диапазоне измерительного устройства матричных фотоприемников на основе приборов с зарядовой связью (ПЗС-матриц). Упрощенно прибор с зарядовой связью можно рассматривать как матрицу близко расположенных фотоодиодов (пикселей) с возможностью произвольного считывания координат «засвеченного» пикселя или группы пикселей (рис. 2).
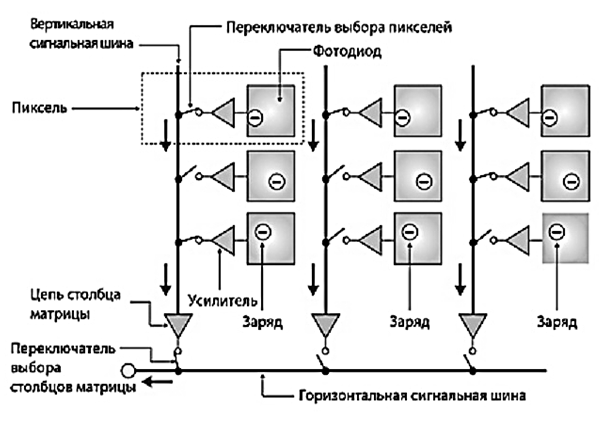
Рис. 2. Использование ПЗС-матрицы для измерения астронавигационных параметров в астронавигационной системе
Fig. 2. Using a CCD sensor to measure astrogation parameters in an astrogation system
Изображения небесных светил, попадая на ПЗС-матрицу, вызывают появление заряда на одном или нескольких пикселях; следовательно, измеряемые астронавигационные параметры будут являться функцией координат «засвеченного» пикселя (или группы пикселей) ПЗС-матрицы. Такое использование ПЗС-матрицы позволяет создать широкопольное измерительное устройство, которое можно жестко связать с системой гироскопической стабилизации.
Если непосредственно перед ПЗС-матрицей разместить специальную оптическую систему, пропускающую инфракрасное изображение, например из германия, то появляется возможность использования для измерения астронавигационных параметров в инфракрасном диапазоне. Использование инфракрасного диапазона позволит использовать астронавигационную систему в любых погодных условиях [15].
В данном случае ПЗС-матрица может быть использована как в широкопольном измерительном устройстве, так и в узкопольном, т. е. в таком, где она жестко не связана с системой гироскопической стабилизациии. В данном случае ПЗС-матрица служит элементом тепловизора, формирующего инфракрасное изображение участка звездного неба, а измерения астронавигационных параметров выполняются относительно гиростабилизированной платформы.
Совмещение оптического измерительного устрой-ства на базе видеокамеры с инфракрасным на базе тепловизора позволяет создать комбинированное оптико-тепловизионное измерительное устройство, которое успешно может применяться для измерения астронавигационных параметров (рис. 3).

Рис. 3. Оптико-тепловизионное измерительное
устройство
Fig. 3. Optical and thermal imaging measuring device
Для измерений в радиодиапазоне может применяться малогабаритный параболический рефлектор-отражатель с электронным сканированием.
Все рассмотренные средства измерения астронавигационных параметров освоены отечественной промышленностью и без существенных затрат в той или иной мере могут быть адаптированы для применения на гражданских судах.
Второе направление предусматривает создание инновационных средств ориентирования измерительного устройства в пространстве, поскольку система гироскопической стабилизации является одним из элементов для измерения астронавигационных параметров. Такими средствами могут быть бесплатформенные инерциальные навигационные системы, судовые гирогоризонты или системы ортогональной триады акселерометров [11]. Рассмотренные средства гироскопической стабилизации также уже освоены отечественной промышленностью [16].
Третье направление предусматривает увеличение количества измеряемых и обрабатываемых астронавигационных параметров. Помимо высотного метода, применяемого в настоящее время на судах гражданского флота, целесообразно применять и другие известные методы, основанные на измерениях азимутов, разности азимутов, разности высот, скорости изменения высоты, скорости изменения азимута и др.
Четвертое направление предусматривает повышение эффективности эфемеридного и программного вычислительного сопровождения. Имеющиеся в настоящее время программные продукты с необходимыми доработками вполне могут быть использованы в качестве базы программного обеспечения судовой астронавигационной системы.
Пятое направление предусматривает совершенствование математических методов обработки информации с целью выработки наиболее точных координат.
Совершенно очевидно, что для снижения стоимости разработки и достижения максимальной функциональности такой астронавигационной системы она должна быть выполнена по модульному принципу с максимальным применением уже существующих и освоенных отечественной промышленностью элементов. Состав и технические характеристики этих элементов могут изменяться в соответствии с типом и назначением судна и требованиями судовладельца. Таким образом, в данном случае проявляется возможность разработки серии таких астронавигационных систем, различающихся как по функциональным возможностям, так и по стоимости.
Первым шагом в данном направлении является экспериментальный образец астроинерциальной навигационной системы, разработанный Пермской научно-производственной приборостроительной компанией [17], устройство которой приведено на рис. 4. Система предусматривает жесткое соединение измерительного астровизирующего устройства (АВУ) на базе ПЗС-матрицы с системой гироскопической стабилизации в виде бесплатформенной инерциальной навигационной системы (БИНС). Конструкция уменьшает погрешности пересчета углов пространственной ориентации, выработанных измерительным устройством и инерциальной навигационной системой, и обеспечивает неподвижность приборных осей, относительно которых измеряются эти углы.
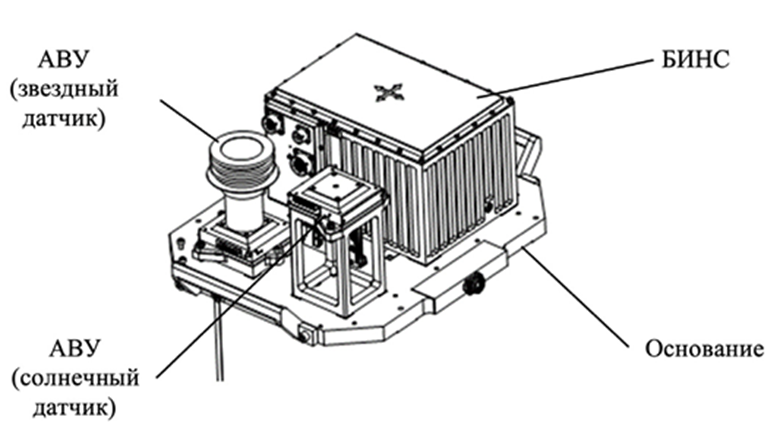
Рис. 4. Устройство астроинерциальной навигационной системы
Fig. 4. The device of the astroinertial navigation system
Система имеет два измерительных устройства, так называемый солнечный датчик для измерения астронавигационных параметров Солнца и звездный датчик для измерения астронавигационных параметров навигационных звезд (рис. 5).
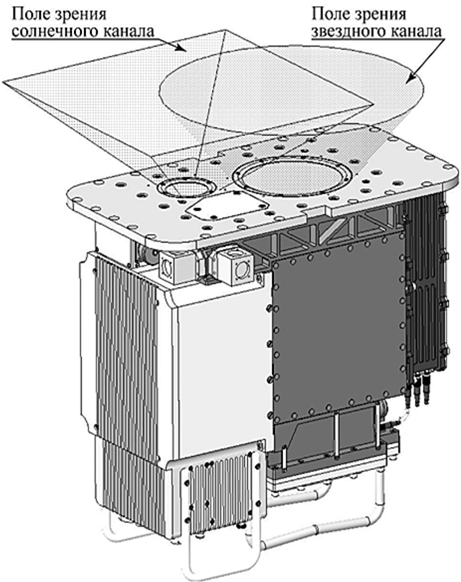
Рис. 5. Поле зрения измерительного устройства
астроинерциальной навигационной системы
Fig. 5. Field of view of the measuring device
of the astroinertial navigation system
Благодаря широкому полю зрения измерительного устройства наведения на отдельные светила не требуется. Параметры измерительного устройства подобраны таким образом, что обеспечивается гарантированное попадание в его поле зрения не менее четырех навигационных звезд. Для измерения четырех астронавигационных параметров требуется несколько секунд.
Измерительное устройство позволяет наблюдать днем не только Солнце, но и отдельные навигационные звезды, а измеряемыми астронавигационными параметрами являются не высота и азимут светила относительно плоскости истинного горизонта, как в рассмотренных системах военно-морского флота, а прямое восхождение и склонение относительно искусственно выработанной инерциальной навигационной системой плоскости небесного экватора.
Общий вид экспериментального образца морской астроинерциальной навигационной системы приведен на рис. 6. К настоящему времени он прошел наземные натурные испытания, подтвердившие обоснованность решений, положенных в основу ее создания.

Рис. 6. Общий вид морской астроинерциальной
навигационной системы
Fig. 6. General view of the marine astroinertial
navigation system
Заключение
Таким образом, мореходная астрономия в обеспечении безопасного судовождения становится все более значимой, и роль ее с каждым годом возрастает. Создание астронавигационных систем для гражданских судов на базе высокотехнологичного автоматизированного оборудования раскроет новые возможности в обеспечении навигационной безо-пасности судовождения. Современные материалы и технологии вполне позволяют выполнить эту задачу, а имеющиеся уже в настоящее время серийные элементы такой системы в значительной мере упрощают процесс проектирования и производства.
Определенный опыт использования инновационных астронавигационных систем наработан в военно-морском флоте, определены требования и методология практического применения, создано соответствующее математическое обеспечение. Даже частичное его применение для создания такого рода систем помогло бы решить многие актуальные научно-технические задачи и значительно снизить стоимость разработки и производства.
К настоящему времени уже оформились два инженерно-технических направления создания массовой автоматизированной судовой астронавигационной системы.
Первое направление предполагает раздельное использование измерительного и гиростабилизирующего устройства, как это выполнено в астронавигационных системах военно-морского флота.
Второе направление предполагает использование измерительного и гиростабилизирующего устройства в виде жестко соединенной конструкции, как это предложено специалистами Пермской научно-производственной приборостроительной компании.
Отечественной промышленностью полностью освоен серийный выпуск всех элементов, которые могли бы использоваться для создания автоматизированной судовой астронавигационной системы. Необходимы дальнейшие научные исследования в данном направлении и продолжение соответствующих опытно-конструкторских разработок, которые могут быть использованы как при проектировании новых судов, так и при модернизации существующих. Наличие на судне автоматизированной системы позволит в полной мере обеспечить навигационную безопасность судовождения в нормальных условиях плавания и в экстремальных условиях при выходе из строя глобальной навигационной спутниковой системы.
1. Komarovskii Iu. A., Kats V. A. Prognozirovanie sboev sputnikovykh navigatsionnykh priemnikov avtonomnykh i bezekipazhnykh sudov obespecheniia morskikh platform [Forecasting failures of satellite navigation receivers of autonomous and unmanned vessels providing offshore platforms]. Gidrotekhnika, 2021, no. 3, pp. 23-26.
2. Alifirova E. A. Laboratoriia Kasperskogo: Problema kiberbezopasnosti sudokhodstva tol'ko-tol'ko poiavliaetsia na gorizonte, no potom mozhet obrushit'sia na nas deviatym valom [Kaspersky Lab: The problem of cybersecurity of shipping is just appearing on the horizon, but then it can come down on us in a ninth wave]. Available at: https://neftegaz.ru/analisis/interview/774932-laboratoriya-kasperskogo-problema-kiberbezopasnosti-sudokhodstva-tolko-tolko-poyavlyaetsya-na-gorizo/ (accessed: 15.01.2024).
3. Gorbachev Iu. E., Pogodin S. N. Vzgliady komandovaniia vooruzhennykh sil SShA na sushchnost' i soderzhanie el-ektromagnitnoi voiny [The views of the US Armed Forces Command on the essence and content of electromagnetic warfare]. Voennaia mysl', 2021, no. 3, pp. 129-140.
4. Peskov Iu. A. Morskaia navigatsiia s GLONASS/GPS [Marine navigation with GLONASS/GPS]. Moscow, Morkniga Publ., 2010. 148 p.
5. Gagarskii D. A. Morekhodnaia astronomiia i kiberbezopasnost' sudna, chto obshchego? [Maritime astronomy and ship cybersecurity, what do they have in common?]. Morskie vesti Rossii, 2023, no. 5. Available at: https://morvesti.ru/themes/1693/103356/ (accessed: 11.01.2024).
6. Kozin S. V., Denisova A. A., Altsibeev G. O. Matematicheskaia model' dvizheniia navigatsionnykh svetil na nebesnoi sfere [Mathematical model of the movement of navigational luminaries on the celestial sphere]. Vestnik gosudarstvennogo universiteta morskogo i rechnogo flota imeni S. O. Makarova, 2020, vol. 12, no. 1, pp. 35-45.
7. Kostin V. N. Sovremennoe sostoianie i perspektivy razvitiia morskoi astronavigatsii [Current state and prospects of development of marine navigation]. Materialy nauchnoi shkoly «Astronavigatsiia-2000». Saint Petersburg, Izd-vo GNINGI MO, 2000. Pp. 106-115.
8. Kostin V. N. Istoriia razvitiia otechestvennykh morskikh astronavigatsionnykh sistem [The history of the development of domestic marine navigation systems]. Navigatsiia i gidrografiia, 2000, no. 11, pp. 133-137.
9. Rol' rossiiskoi nauki v sozdanii otechestvennogo podvodnogo flota [The role of Russian science in the creation of the Russian submarine fleet]. Pod redaktsiei A. A. Sarkisova. Moscow, Nauka Publ., 2008. Pp. 391-395.
10. Ismailov A. I. Razvitie navigatsionnykh kompleksov raketnykh podvodnykh lodok strategicheskogo naznacheniia v period sozdaniia i stanovleniia morskikh strategicheskikh iadernykh sil [Development of navigation systems for strategic missile submarines during the creation and establishment of the naval strategic nuclear forces]. Navigatsiia i gidrografiia, 2019, no. 57, pp. 7-15.
11. Bogomazov K. Ia. Osvoenie navigatsionnykh kompleksov na podvodnykh lodkakh Severnogo flota [Development of navigation systems on submarines of the Northern Fleet]. Saint Petersburg, Elektropribor Publ., 2011. 318 p.
12. Galichskii A. V. Shturmanskii ofitserskii klass VMF Rossii. Istoriia sozdaniia i razvitiia [Navigator officer class of the Russian Navy. History of creation and development]. Saint Petersburg, Litres Publ., 2022. 335 p.
13. Alekseev S. P. Sovremennoe sostoianie i perspektivy razvitiia fundamental'noi i prikladnoi astronomii dlia obespecheniia navigatsii podvizhnykh ob"ektov razlichnogo naznacheniia [Current state and prospects of development of fundamental and applied astronomy for navigation of mobile objects for various purposes]. Materialy nauchnoi shkoly «Astronavigatsiia-2000». Saint Petersburg, Izd-vo GNINGI MO RF, 2000. Pp. 7-13.
14. Kirillov N. O. Sovremennye sredstva i metody morekhodnoi astronomii [Modern means and methods of nautical as-tronomy]. Kaliningrad, Izd-vo BGARF, 2017. 97 p.
15. Kostin V. N., Lavrent'ev A. V. O korrektsii navigatsionnykh parametrov pri rabote astronavigatsionnoi sistemy v in-frakrasnom diapazone izlucheniia [On correction of navigation parameters during operation of the astrogation system in the infrared range of radiation]. Navigatsiia i gidrografiia, 2017, no. 49, pp. 32-37.
16. Iaroshenko S. A., Frantsuzov G. A. Vybor optimal'noi inertsial'noi navigatsionnoi sistemy morskikh podvizhnykh ob"ektov [Choosing the optimal inertial navigation system for marine mobile objects]. Navigatsiia i gidrografiia, 2023, no. 70, pp. 27-33.
17. Bolotnov S. A., Gerasimchuk Iu. N., Shkatov M. Iu., Bolotnov A. S., Kondrashkin G. V. Astronomicheskie inertsi-al'nye sistemy dlia primeneniia v morskikh navigatsionnykh kompleksakh [Astronomical inertial systems for use in marine navigation systems]. Prikladnaia fotonika, 2023, vol. 10, no. 4, pp. 89-101.
