









Russian Federation
Energy-efficiency in contemporary electromachine technology depend on characteristics electrodrives, that requires optimization his exist and new structural elements. A model of optoelectronic electrodrive with laser-ultrasound cognitive transformation of energy and information is investigated. Model includes following basic elements: electromotor, driving a working mechanism; measuring-information complex, controlling and operating electromotor; amplifier on basis multi-modes solid laser with ultrasound quality modulator (UQML); transformer of laser pulses into voltage either current or magnetic field of electromotor. Researches dynamics of generating depend on pumping power and ultrasound intensity executioned on the rubin laser. Transition characteristic of electrodrive is defines by inertia of electromechanic elements, considerably exceed inertia of optoelectronic equipments. Inertia of electrodrive smooth out pulses of frequency-impulse energy (FIE). When estimation transition characteristic of electrodrive, take into account his inertia, FIE of laser radiation was accepted quasyconstant in time interval constant energy of pumping source and estimates alteration of rotation frequency and current force of electromotor were conducting on basic laws Kirchgof and Newton in approximation constant current by medium Matlab, Simulink. In the absence of ultrasound UQML radiates a chaotic optical impulse. By ultrasound control UQML passes into establish regime of frequency-impulse radiation. Repetition frequency of regular pulses is determination by pumping level when ultrasound power is constant, but did not depend on ultrasound frequency. Examined questions: self-regulation frequency-pulse generation, cognitive transformation of UQML; dynamics of electrodrive (ED) with UQML; equivalent powers sources of frequency-pulse and constant current; inertness ED with UQML; structure scheme of automatic ED with UQML. Self-regulation of UQML attach to increase energy-efficiency, possibility automatical of electrodrive.
laser with ultrasonic Q modulator, optoelectronic electric drive, energy efficiency, control, automation, digitalization
Введение
В условиях цифровой трансформации при разработке автоматизированных систем используются аналогии функций головного мозга [1, 2]. Аналогичные функциональные блоки могут наблюдаться в многомодовых лазерах [3]. Достижения в создании мощных лазеров [4], фотоэлектронных преобразователей [5], оптоэлектронных бесколлекторных электродвигателей [6], оптоэлектронных систем связи, обнаружения и распознавания [7], альтернативной электроэнергетики [8] делают актуальным применение интеллектуальных оптоэлектронных технологий в электротехнических системах, например электроприводах.
В статье [1] уже были проанализированы экспериментальные данные по генерации твердотельного лазера с ультразвуковым модулятором добротности (ЛУЗМД). Цель настоящей работы заключается в рассмотрении ЛУЗМД как модели «управляемого хаоса» при оптоэлектронном преобразовании информации и энергии, а также особенности применения ЛУЗМД в контуре управления электропривода.
Саморегулирование, когнитивность ЛУЗМД
Кроме формирования мощных лазерных импульсов, с помощью ультразвукового модулятора добротности можно кардинально менять характер генерации многомодового лазера. Благодаря дифракции света на ультразвуковых волнах активная среда лазера может стать оптически однородной, что приводит к генерации (вместо хаотических пичков в отсутствие ультразвука) регулярных импульсов, частота повторения которых не зависит от частоты ультразвука, а определяется мощностью накачки. Лазер с ультразвуковым модулятором добротности при этом приобретает способность саморегулирования частотного режима генерации при изменении мощности накачки под действием внешних воздействий, что является признаком когнитивности. Это свойство присуще электроприводу как системе, содержащей когнитивное звено, в котором осуществляется лазерно-ультразвуковое когнитивное преобразование энергии и информации.
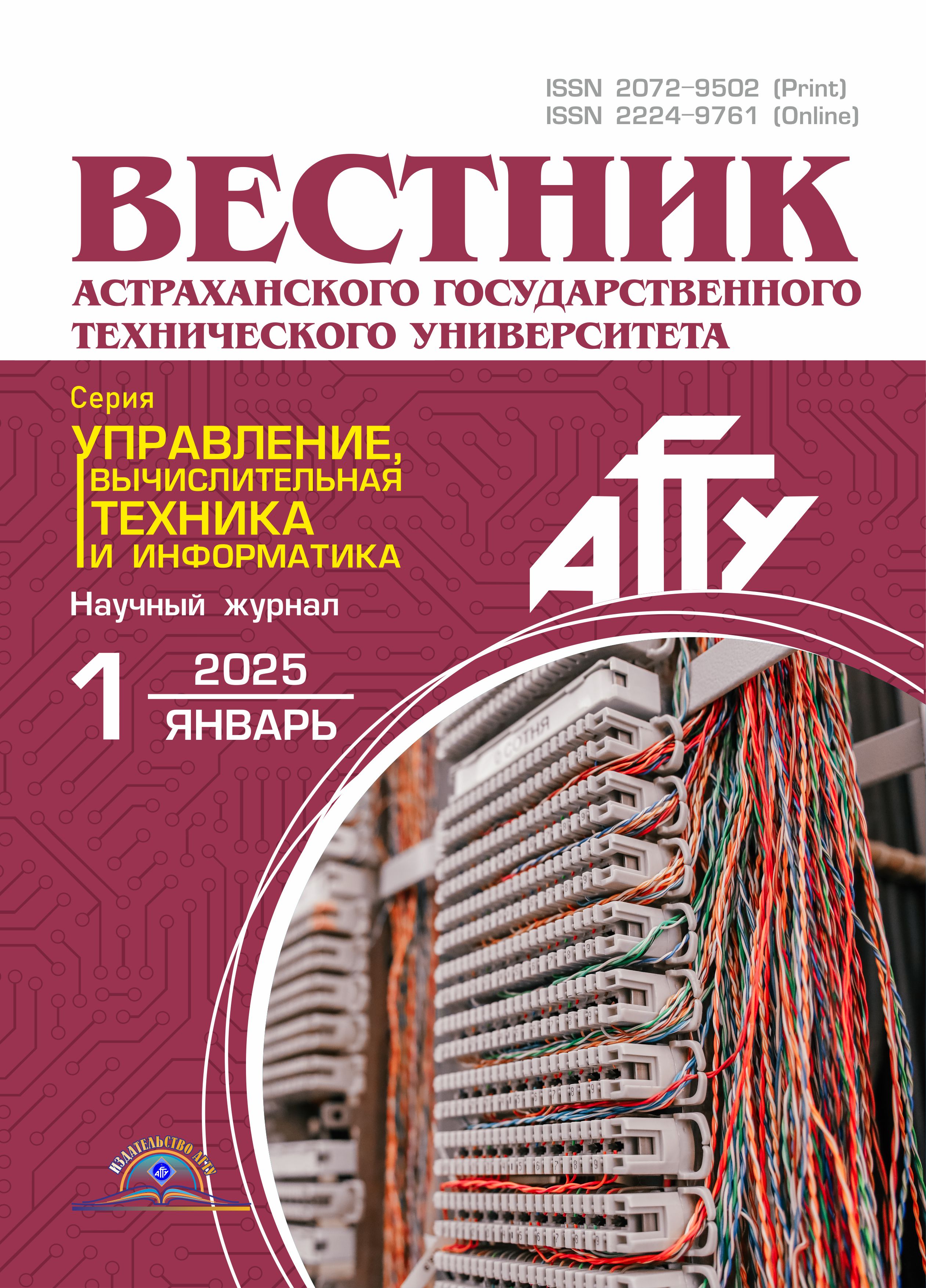
Модель ЛУЗМД, согласно работе [9], может быть представлена 5 × 5 матрицей, классифицирована по признаку связи структурных элементов и сопоставлена с моделями сложных систем [2]. Модель ЛУЗМД позволяет управлять хаосом излучения. Вместо хаотической «пичковой» генерации без ультразвука многомодовый ЛУЗМД при включении ультразвука излучает регулярную последовательность импульсов, частота повторения и амплитуда которых не зависят от частоты ультразвука, а определяется мощностью накачки и ультразвука. Благодаря дифракции на ультразвуковых волнах в модуляторе добротности все потоки излучения в активной среде лазера информационно и энергетически оказываются связанными. При этом ЛУЗМД проявляет когнитивные свойства, аналогичные головному мозгу: регуляция и сохранение уровня функционирования по преобразованию информации и энергии. Примеры управляемого хаоса представлены на рис. 1.
Целостность и устойчивость регулярной генерации, наблюдаемой на участке импульса накачки с постоянной амплитудой, сохраняется в широком диапазоне изменения мощности накачки. В этом проявляется способность лазерной системы к саморегулированию, когнитивности. Частота регулярных импульсов не зависит от частоты ультразвука, а пропорциональна мощности накачки при той же интенсивности ультразвука. Лазер с ультразвуковым модулятором добротности в режиме саморегулирования позволяет управлять частотой генерации импульсов изменением мощности накачки и интенсивности ультразвука.
|
|
|
|
|
а |
б |
в |

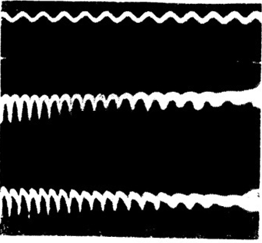
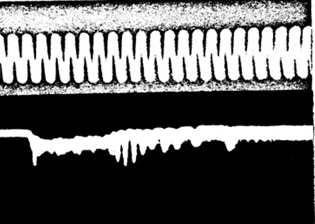
Рис. 1. Управляемый хаос в ЛУЗМД: а – ультразвук выключен (пичковая генерация); б – ультразвук включен
(осциллограммы двух дифракционных максимумов, регулярная генерация); в – высокочастотная регулярная
генерация при увеличении мощности накачки в 2 раза, по сравнению с а и б мощность ультразвука не менялась.
Частота калибровки 100 кГц (верхние осциллограммы)
Fig. 1. Controlled chaos in the UQML: a – ultrasound is turnedoff (peakgeneration); б – ultrasound is turnedon
(oscillograms of two diffraction maxima, regular generation); в – high–frequency regular generation with a 2-fold increase
in pumping power, compared with a and б ultrasound power did not change.
Calibration frequency of 100 kHz (upper wave forms)
Динамика электропривода с ЛУЗМД
Эквивалентность мощностей источников частотно-импульсного и постоянного тока. Под эквивалентностью мощностей источников постоянного и частотно-импульсного тока понимается равенство их мощностей P, которое достигается при частоте повторения импульсов Fи, равной
Fи =![]() , (1)
, (1)
где Wи – энергия в одном импульсе. Например, для питания бесколлекторного электродвигателя постоянного тока электропривода требуется мощность 10 Вт, энергия в одном импульсе Wи = 60 мДж, длительность 10 нс. Частота Fи, следуя (1), составит Fи = 160 Гц.
Инерционность электропривода с ЛУЗМД. Процессы преобразования энергии характеризуются инерционностью всего комплекса электропривода, которая в основном определяется инерционностью его электромеханической части, поскольку на порядки превышает инерционность оптоэлектронных звеньев. Так, для электропривода с бесколлекторным электродвигателем постоянного тока БУВП-60 в номинальном режиме момент инерции оценивают величиной J = 2 кг∙м2, при этом система управления обеспечивает апериодический переходный процесс. В ходе эксплуатации момент инерции может изменяться в пределах 0,5–10 кг∙м2 за время ~0,8 с [10].
Учитывая большую инерционность электропривода по сравнению с периодом регулярных пульсаций при саморегулировании лазера, можно считать мощность лазерного излучения квазипостоянной в течение действия источника накачки. Поэтому изменение тока и частоты вращения якоря во времени может быть исследовано в приближении источника постоянного тока с помощью системы динамических уравнений на основе законов Кирхгофа и Ньютона [11]
u = kФω + ir +![]() ; (2)
; (2)
M = Mc + ![]() , (3)
, (3)
где u – напряжение; k – конструктивный коэффициент; Ф – магнитный поток двигателя; ω – угловая скорость якоря; i – ток якоря; r – активное сопротивление; L – индуктивность якорной цепи; t – время; M = kФ · i – номинальный момент двигателя; Mc – момент нагрузки; J – момент инерции двигателя и нагрузки.
Если положить c = kФ, то M = ci; электродвижущая сила двигателя eД = cω. Пример расчета динамики электропривода постоянного тока, согласно системе уравнений (2), (3), зависимостей ω = f(t) и i = f(t) в пакете MATLAB для номинальных значений: мощности Pн = 2 кВт; напряжения uн = 110 В; частоты вращения nн = 3 000 об/мин; КПД = 0,785; сопротивления якорной цепи r = 0,336 Ом; индуктивности обмотки якоря L = 6,6 мГн; момента инерции электропривода J = 0,01375 кг·м2 приведен на рис. 2 (по оси абсцисс отложено время в секундах, по оси ординат – сила тока (нижняя кривая), частота вращения (верхняя кривая) в относительных единицах).
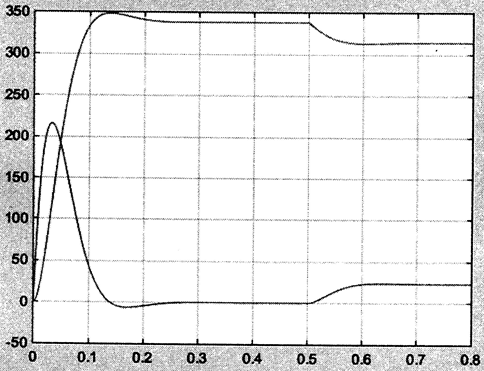
Рис. 2. Пример расчета в системе MATLAB для электропривода с двигателем постоянного тока [11]
Fig. 2. Calculation example in the MATLAB system for an electric drive with a DC motor [11]
На рис. 2 можно видеть, что на участке запуска двигателя без нагрузки пусковой ток резко увеличивается. Управление частотой следования регулярных лазерных пульсаций в зависимости от мощности накачки и интенсивности ультразвука повышает энергоэффективность, расширяет возможности автоматизации и цифровизации электропривода.
Структурная схема и динамика комплекса автоматического электропривода с ЛУЗМД
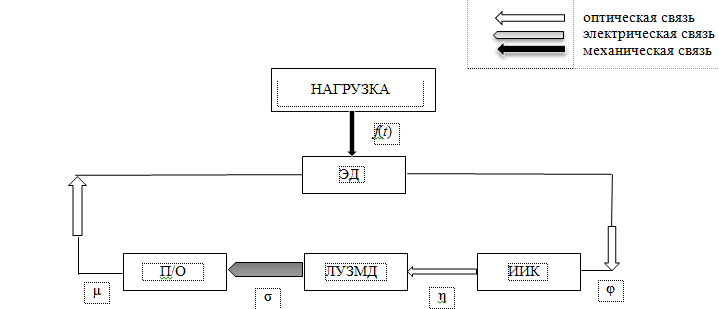
Рис. 3. Структурная схема автоматического оптоэлектронного когнитивного электропривода:
f(t) – сигнал НАГРУЗКИ (возмущающее воздействие); ЭД – электродвигатель; П/О (преобразователь импульсного лазерного излучения в электрический ток и магнитное поле якоря ЭД);
ИИК – измерительно-информационный комплекс; μ – выходной сигнал П/О (регулирующее воздействие); σ – выходной сигнал усилительного элемента ЛУЗМД; η – выходной сигнал ИИК; φ – выходной сигнал ЭД
Fig. 3. Block diagram of an automatic optoelectronic cognitive electric drive: f(t) is the load (НАГРУЗКИ) signal
(disturbing effect); ЭД is an electric motor; П/О (converter of pulsed laser radiation into electric current and magnetic field
of the ЭД armature); ИИК is a measuringand information complex; μ is the output signal of the П/О (regulating effect);
σ – the output signal of the amplifying element of the ЛУЗМД; η – the output signal of the ИИК;
φ – the output signal of the ЭД
Схема включает два связанных блока: электромеханический со звеньями ЭД и НАГРУЗКА; оптоэлектронный регулятор со звеньями ИИК, ЛУЗМД, П/О. Возможные связи между звеньями обозначены значками.
Координатами системы служат: φ – выходной сигнал ЭД; η – выходной сигнал ИИК; σ – выходной сигнал усилительного элемента ЛУЗМД; μ – выходной сигнал П/О (регулирующее воздействие); f(t) – сигнал НАГРУЗКИ (возмущающее воздействие).
Объектом управления является электродвигатель ЭД электропривода. Измерительно-информационный комплекс контролирует динамику ЭД при изменении параметров нагрузки f(t) и формирует управляющие воздействия на структурные элементы для обеспечения энергоэффективности электропривода [9]. Под действием источника накачки ЛУЗМД генерирует импульсы световой энергии, которые преобразуются и передаются с помощью средств П/О электродвигателю ЭД, обеспечивая его работу на холостом ходу и с НАГРУЗКОЙ. При этом П/О может преобразовывать лазерные импульсы как в ток, так и в магнитное поле якоря ЭД [12, 13].
Структурную схему рис. 3 можно отнести к системам непрямого регулирования. Общий вид уравнений четвертого порядка в приращениях и с безразмерными переменными динамики системы автоматического управления приведен в работе [14]:
– уравнение электромеханического блока
Tа![]() + kφ = μ – f(t);
+ kφ = μ – f(t);
– уравнение измерителя ИИК
Tr2![]() + Tk
+ Tk ![]() + γη + φ = ±
+ γη + φ = ± ![]() ;
;
– уравнение усилительного элемента ЛУЗМД
σ = η – βμ;
– уравнение исполнительного элемента П/О
![]() = F(σ),
= F(σ),
где k, β, ε / 2 – коэффициенты саморегулирования объекта, обратной связи регулятора, нечувствительности измерительного элемента соответственно; φ – входное воздействие для ИИК: μ – регулирующее воздействие; f(t) – возмущающее воздействие; η – выходной сигнал ИИК; γ – коэффициент неравномерности измерителя; σ – выходной сигнал усилительного элемента; F(σ) – сила, действующая на преобразователь П/О; Tа, Tr2, Tk – постоянная времени объекта регулирования, с, постоянная времени измерительного элемента, с2, коэффициент демпфирования соответственно.
Рассматриваемая система автоматического регулирования содержит импульсный элемент ЛУЗМД, который непрерывные сигналы, подаваемые на его вход, преобразует в дискретные: равно отстоящие друг от друга по времени импульсы (режим частотно-импульсной энергии). Соответственно, уравнениями динамики системы электропривода могут быть разностные уравнения.
Обсуждение
Рассмотренная лазерная модель «управляемого хаоса» при внутрирезонаторном управлении ультразвуковым модулятором добротности на немодулированной стоячей ультразвуковой волне позволяет вместо хаотической «пичковой» генерации без ультразвука получать регулярную последовательность импульсов, частота повторения и амплитуда которых не зависит от частоты ультразвука, а определяется мощностью накачки и ультразвука. При этом ЛУЗМД проявляет когнитивные свойства, аналогичные головному мозгу: регуляция и сохранение уровня функционирования по преобразованию информации и энергии. Актуальным видится применение ЛУЗМД в электромеханических системах, например в электроприводах.
Анализ структуры, динамической модели, инерционности электропривода с ЛУЗМД показывает, что источник частотно-импульсной энергии (ЧИЭ) может иметь преимущество перед источником постоянного тока. Например, диагностика состояния саморегулирования электропривода в режиме ЧИЭ может осуществляться по контролю изменения частоты повторения регулярных лазерных пульсаций.
Динамическая модель электропривода с ЛУЗМД позволяет оптимизировать энергоэффективность оптоэлектронного преобразования, исследовать пространственно-энергетические, динамические характеристики электропривода в среде MATLAB, пакете Simulink.
Заключение
Исследована модель «управляемого хаоса» на основе многомодового ЛУЗМД. Ультразвуковой модулятор добротности, благодаря дифракции на стоячей немодулированной ультразвуковой волне, связывает все световые волны лазера в однородное поле, динамика которого не зависит от частоты ультразвука, и может изменяться с ростом мощности накачки от режима ЧИЭ до квазинепрерывной генерации. Лазер с ультразвуковым модулятором добротности проявляет свойство саморегулирования, способность самостоятельно, автоматически переходить от одного устойчивого состояния генерации к другому в ответ на внешнее воздействие, приводящее к изменению мощности накачки. Саморегулирование ЛУЗМД, в случае его применения в контуре управления электропривода, придает электроприводу когнитивные свойства, способствует повышению его энергоэффективности, расширяет возможности автоматизации и цифровизации.
Переходная характеристика всего комплекса электропривода определяется инерционностью электромеханических элементов, значительно превышающей инерционность оптоэлектронных устройств. Инерционность электропривода сглаживает пульсации ЧИЭ. Учитывая большую инерционность электропривода, можно считать ЧИЭ лазерного излучения квазипостоянной в течение действия источника накачки и оценку частоты вращения и силы тока якоря проводить на основе законов Кирхгофа и Ньютона в приближении источника постоянного тока, используя среду MATLAB, пакет Simulink. Как показывают расчеты, на участке запуска двигателя без нагрузки пусковой ток значительно превышает номинальный. Когнитивный режим ЧИЭ позволяет проводить диагностику и управлять электроприводом, контролируя частоту следования регулярных импульсов при изменении мощности накачки.
1. Terent'ev V. E. Avtomatizaciya i ul'trazvukovoe up-ravlenie processom dostavki elektroenergii po intellek-tual'nomu lazernomu kanalu dinamicheskomu elektromek-hanicheskomu preobrazovatelyu [Automation and ultrasonic control of the electric power delivery process via an intelligent laser channel and a dynamic electromechanical converter]. Sovremennaya nauka: aktual'nye problemy teorii i praktiki. Seriya: Estestvennye nauki, 2019, no. 3, pp. 94-98.
2. Luriya D. R. Obshchaya strukturno-funkcional'naya model' mozga kak substrata psihicheskoj deyatel'nosti [The general structural and functional model of the brain as a substrate of mental activity]. Available at: https://nauka.jofo.me/1598543.html (accessed: 09.09.2024).
3. Danilov O. B., Rozanov N. N., Solov'ev N. A., Soms L. N. Mnogomodovye lazery kak analogi slozhnyh biologicheskih sistem (obzor) [Multimode lasers as ana-logues of complex biological systems (review)]. Optika i spektroskopiya, 2016, vol. 120, no. 4, pp. 682-690.
4. Samarcev I. E. Moshchnye volokonnye lazery – 20 let razvitiya [High-power fiber lasers – 20 years of developments]. Available at: C:/Users/user/Documents/C:/Users/user/Documents/Moshchnye%20volokonnye%20lazery%20-%2020%20let%20razvitiya.html (accessed: 09.09.2024).
5. Andreev V. M., Emelyanov V. M., Kaluzhnyy N. A., Khvostikov V. P., Mintairov S. A., Potapovich N. S., Sorokina S. V., Timoshina N. Kh. Photovoltaic laser-power converter based on AlGaAs/GaAs heterostructures. Semicondactors, 2016, vol. 50 (9), pp. 1242-1246.
6. Terent'ev V. E. Beskollektornyj elektrodvigatel' [Brushless electric motor]. Patent 2727934, Rossijskaya Federaciya, MPK H02P 9/14; no. 2020107395; 27.07.2020.
7. Miroshnikov M. M. Opticheskie harakteristiki izlu-cheniya celej i fonov – fizicheskaya osnova sozdaniya optiko-elektronnoj apparatury [Optical characteristics of radiation from targets and backgrounds are the physical basis for the creation of optoelectronic equipment]. Voprosy oboronnoj tekhniki. Seriya 10, 1992, iss. 1-2, pp. 3-10.
8. Sidorovich V. Mirovaya energeticheskaya revolyuciya: kak vozobnovlyaemye istochniki energii izmenyat nash mir [The Global Energy Revolution: how renewable energy sources will change our world]. Moscow, Alpina Publ., 2015. 240 p.
9. Terent'ev V. E. Modelirovanie elektricheskih cepej i sistem s optiko-elektronnymi ustrojstvami: monografiya [Modeling of electrical circuits and systems with optoelec-tronic devices: monograph]. Saint Petersburg, Izd-vo SPGUVK, 2009. 201 p.
10. Alekseev A. S., Zamyatin S. V., Plotnikov D. A. Opredelenie momenta inercii elektroprivoda po vremennym harakteristikam [Determination of the moment of inertia of an electric drive based on time characteristics]. Izvestiya Tomskogo politekhnicheskogo universiteta, 2009, vol. 314, no. 5, pp. 65-69.
11. Dzhendubaev A.-Z. R., Aliev I. I. MATLAB, Sim-ulink i SimPowerSystems v elektroenergetike: uchebnoe posobie [MATLAB, Simulink and SimPowerSystems in the electric power industry: a study guide]. Cherkessk, BIC SevKavGGTAb, 2014. 136 p. Available at: https://s.siteapi.org/ca7cf74119b6a4e/docs/59d7f5f72cdd7ddd621e63fffa3d7c68b9b58142.pdf (accessed: 09.09.2024).
12. Terent'ev V. E., Ochina L. B., Belousova I. M., Rusov V. A., Andreev A. A. Opticheskaya generaciya toka i magnitnogo polya v dinamicheskih elektrotekhnicheskih kompleksah [Optical generation of current and magnetic field in dynamic electrical engineering complexes]. Vestnik Astrahanskogo gosudarstvennogo tekhnicheskogo universiteta, 2022, no. 2 (74), pp. 38-47.
13. Terent'ev V. E., Belousova I. M., Rusov V. A., An-dreev A. A. Issledovanie preobrazovaniya lazernogo im-pul'snogo izlucheniya sistemoj «kondensator-katushka» [Investigation of the conversion of laser pulse radiation by a ca-pacitor-coil system]. Monitoring. Nauka i tekhnologii, 2024, no. 2, pp. 64-70.
14. Nelepin R. A. Teoriya upravleniya [Management theory]. Saint Petersburg, VMII, 2006. 416 p.
