











Samara, Russian Federation
Russian Federation
Russian Federation
The design of robotic and unmanned vehicles includes a virtual commissioning stage that provides an analysis of the operation of objects using digital twins. Conducting a large number of experiments on models leads to the use of methods for evaluating the results obtained to choose the best design solution. A method of multifactorial anal-ysis of the efficiency of the complex of autonomous vehicles (AV) for agro-industrial purposes is proposed. Multivariate analysis is performed at the virtual commissioning stage in order to plan early maintenance and repair activities. The paper uses the method of analyzing the operating environment for a comparative assessment of various operating scenarios. The method is based on solving a complex of optimization problems of linear programming. A formal description of virtual test scenarios is proposed. The method of multifactorial analysis is implemented in the process of virtual tests using optimal purpose system models and AV simulation. A procedure for virtual AV tests has been developed, including step-by-step modeling and multivariate analysis. The sets of input and output key parameters of the AV and analyzed scenarios are determined. It is proposed to perform two consecutive efficiency assessment tasks. The first task is to compare the effectiveness of individual AV and determine the limits of their effectiveness. The solution of the second task makes it possible to evaluate the effectiveness of AV system operation scenarios. The target values of changes in the key parameters of the AV and operating scenarios are obtained, leading to an increase in the efficiency of operation and maintenance. Conducting a multifactorial analysis of the results of virtual tests allows you to formulate requirements and recommendations for the design of AV maintenance systems.
autonomous vehicle, virtual commissioning, maintenance, multi-factor analysis, Data Envelopment Analysis method, efficiency evaluation
Введение
Разработка и внедрение автономных транспортных средств (АТС) в различные отрасли промышленности является одним из компонентов концепции «Индустрия 5.0» [1, 2]. Характерная особенность АТС как киберфизических систем – наличие в составе оборудования большого числа измерительных устройств, подсистем автономного управления и средств передачи данных на удаленные центры обработки и анализа технического состояния транспортных средств. Это позволяет в реальном времени контролировать режимы работы и проводить диагностику узлов и агрегатов. В то же время возникает проблема предварительного определения структуры и средств технического обслуживания и ремонта (ТОиР) на этапе проектирования и производства АТС. В современной индустрии развивается подход, основанный на виртуальных испытаниях проектируемых изделий на этапе виртуального ввода в эксплуатацию [3–5].
В настоящей статье описывается методика проведения виртуальных испытаний и оценки полученных результатов применительно к комплексу АТС сельскохозяйственного назначения, обслуживающему производственно-логистическую систему агропромышленного предприятия. Исследования проводились в рамках НИР, выполненных Самарским государственным техническим университетом совместно с АО «КАМАЗ», по Федеральной целевой программе по созданию робототехнического автомобиля сельскохозяйственного назначения [6, 7].
Задача организации ТОиР АТС в процессе виртуального ввода в эксплуатацию
Подход к организации эксплуатации, ТОиР комплекса АТС описан в работе [8]. На основе предложенного комплекса системных моделей формируется процедура виртуальных испытаний, которая включает решение оптимизационной задачи назначений, имитационное моделирование динамики производственных процессов и выполнение многофакторной оценки эффективности работы виртуальных АТС в заданных условиях внешней среды.
Рассматривается производственно-логистическая система, включающая:
– парк A автономных грузовых автомобилей семейства КАМАЗ;
– парк U автономных комбайнов моделей TORUM 785 и CLAAS LEXION 580;
– множество обрабатываемых полей с зерновыми культурами;
– множество маршрутов между полями и зернохранилищем [8].
Сценарии виртуальных испытаний зависят от планового графика работ G на множестве полей P, состояния готовности АТС к эксплуатации, ожидаемых погодных условий W.
Сценарий Sj определяется как
![]()
где – множество комбайнов и ![]() – множество автомобилей, назначенных на работы G на полях
– множество автомобилей, назначенных на работы G на полях ![]() с дорожной структурой D;
с дорожной структурой D;
J – множество анализируемых сценариев. В свою очередь, множества Uj и Aj включают подмножества активных, резервных и каннибализируемых АТС.
На первом этапе проводится решение задачи целочисленного линейного программирования с булевыми переменными для оптимального назначения автономных автомобилей и комбайнов на поля в соответствии с календарно-сетевым графиком работ G:

Целевая функция C есть общая стоимость эксплутации АТС при выполнении работ на заданном множестве полей:
![]() (1)
(1)
где cknm – суммарная стоимость выполнения производственных операций одним АТС на поле pk. Ограничения для задачи (1) учитывают технические параметры АТС, а также степень загруженности автономных автомобилей в соответствии с площадью убираемых полей и объемами бункеров зерноуборочных комбайнов.
На следующем этапе выполняются имитационные эксперименты на иерархической модели, построенной на стохастической раскрашенной сети Петри. Методика построения таких моделей для исследования эксплуатации и технического обслуживания киберфизических систем разработана и описана в [9]. По результатам имитационного моделирования при необходимости проводится коррекция условий оптимизационной задачи. При удовлетворении требований выполняется переход к многофакторной оценке эффективности функционирования комплекса АТС для различных сценариев и заданных наборов параметров.
Многофакторный анализ выполняется по методу АСФ – анализ среды функционирования (Data Envelopment Analysis – DEA) [10–14]. Этот метод позволяет оценить интегральную эффективность комплекса однородных объектов DMU (Decision Making Unit) по заданному набору их параметров. В качестве анализируемых объектов в настоящей статье предлагается рассматривать множество сценариев, генерируемых в процессе виртуальных испытаний, и множества АТС, участвующих в сценарии.
Будем рассматривать 2 задачи многофакторного анализа:
– задача 1 – оценка эффективности эксплуатации и технического обслуживания отдельных АТС в заданном сценарии Sj;
– задача 2 – оценка эффективности выполнения заданного множества производственных работ G в различных сценариях Sj, j = 1, ..., J.
Таким образом, процедуру виртуальных испытаний комплекса АТС при различных сценариях можно представить в виде, показанном на рис. 1.
Если в результате виртуального испытания требования к проектируемой системе АТС не удовлетворяются, проводится коррекция либо частных моделей, либо условий выполнения сценария в целом. Такую коррекцию выполняет аналитик, специализирующийся на проектировании АТС.
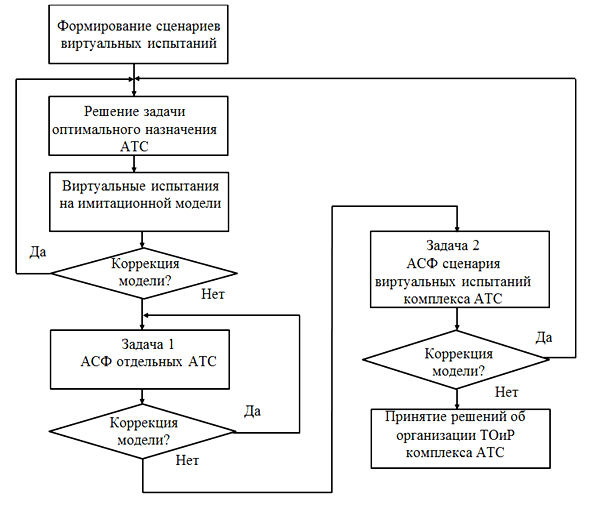
Рис. 1. Процедура виртуальных испытаний автономных транспортных средств
Fig. 1. The procedure for virtual testing of autonomous vehicles
Метод многофакторного анализа оценки эффективности АТС
Техническая эффективность ТЕ комплекса АТС рассчитывается как соотношение суммы взвешенных результатов производственной деятельности АТС к сумме взвешенных использованных средств:
![]()
Каждый сценарий ![]() описывается вектором входных параметров
описывается вектором входных параметров ![]() и вектором выходных параметров
и вектором выходных параметров ![]() . Соответственно, для всех оцениваемых сценариев формируются матрица
. Соответственно, для всех оцениваемых сценариев формируются матрица ![]() и матрица
и матрица ![]()
Задача многофакторного анализа при оценке эффективности работы комплекса АТС на множестве различных сценариев при использовании метода АСФ сводится к нахождению минимума критерия эффективности θ (задача Банкера – Чарнеса – Купера [10])
![]() (2)
(2)
при ограничениях
 , (3)
, (3)
где θ – интегральный критерий эффективности j-го сценария, θ ∈ (0; 1]; λ – вектор-столбец искомых неизвестных весовых коэффициентов; e – единичная вектор-строка.
Решение системы уравнений (2), (3) дает расположение всех анализируемых сценариев в многомерном пространстве параметров относительно границы эффективности. Далее находятся целевые изменения параметров каждого сценария для вывода его точно на границу эффективности.
Выбор наборов входных и выходных параметров объекта в методе АСФ не связан с направлением обработки каких-либо информационных потоков в объекте или преобразованием некоторого материального продукта, а обусловлен характером воздействия изменений параметра на величину критерия эффективности в целом. В input-ориентированной модели к повышению эффективности приводит уменьшение входных параметров. В output-ориентированной модели эффективность повышается при увеличении выходных параметров.
Алгоритм многофакторного анализа сценариев при виртуальных испытаниях представлен на рис. 2.
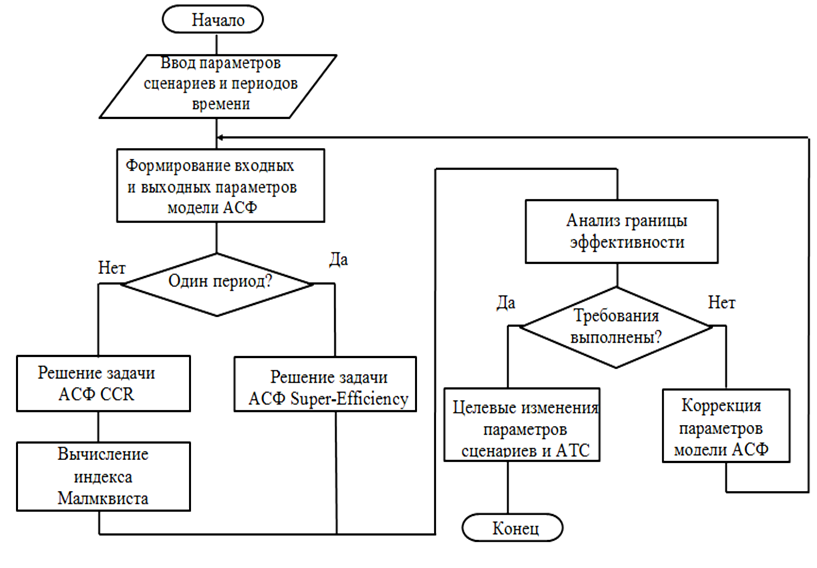
Рис. 2. Алгоритм многофакторного анализа эффективности сценариев виртуальных испытаний
Fig. 2. Algorithm for multifactorial analysis of the effectiveness of virtual test scenarios
Если рассматриваются сценарии с двумя или более периодами работы комплекса АТС, то выполняется решение задачи CCR Чарнеса – Купера – Родеса и рассчитывается индекс Малмквиста, который характеризует динамику эффективности производственного процесса. При анализе одного периода решается задача BCC Банкера – Чарнеса – Купера с построением границы суперэффективности [11]. Конечным результатом применения метода АСФ является набор целевых изменений параметров (Target Values – TV), улучшающих ключевые характеристики производственно-логистической системы.
Анализ эффективности АТС
Сначала при проведении виртуальных испытаний в рамках одного сценария Sj решается задача 1 (см. рис. 1). Рассматриваются два множества типов АТС:
а) множество Aj автономных автомобилей;
б) множество Uj автономных комбайнов.
Определены входные F1–F4 и выходные Z1–Z3 показатели эффективности функционирования транспортных средств (табл. 1).
Таблица 1
Table 1
Показатели для оценки эффективности АТС
Indicators for evaluating the effectiveness of AV
|
Обозначение |
Показатель эффективности |
|
F1 |
Потребление топлива автомобилем, л/100 км |
|
F2 |
Коэффициент сходов с маршрута, % |
|
F3 |
Коэффициент простоя на ТОиР, % |
|
F4 |
Удельная величина затрат на перемещение груза, руб./т |
|
Z1 |
Средняя скорость движения автомобиля в наблюдаемый период, км/ч |
|
Z2 |
Пробег месячный, км |
|
Z3 |
Удельное грузоперемещение, т/км |
В табл. 2 приведены значения этих показателей для парка из восьми автономных автомобилей A1–A8 и пяти автономных комбайнов U1–U5.
Таблица 2
Table 2
Значения параметров для оценки эффективности АТС
Parameter values for evaluating the effectiveness of AV
|
DMU |
F1 |
F2 |
F3 |
F4 |
Z1 |
Z2 |
Z3 |
|
A1 |
35 |
2 |
1 |
12 |
25 |
2 700 |
0,14 |
|
A2 |
30 |
0,6 |
0,6 |
8 |
36 |
3 200 |
0,22 |
|
A3 |
34 |
1,2 |
0,77 |
10,3 |
30 |
3 000 |
0,18 |
|
A4 |
31 |
0,7 |
0,7 |
7,8 |
36 |
3 200 |
0,21 |
|
A5 |
29 |
0,66 |
0,6 |
7,4 |
35 |
3 250 |
0,27 |
|
A6 |
36 |
1,6 |
0,85 |
11,5 |
26 |
2 800 |
0,11 |
|
A7 |
33 |
1 |
0,73 |
10 |
29 |
3 100 |
0,2 |
|
A8 |
32 |
0,95 |
0,75 |
9 |
31 |
2 900 |
0,16 |
|
U1 |
36 |
1,8 |
0,9 |
12,3 |
24 |
2 750 |
0,03 |
|
U2 |
37 |
1,4 |
1,1 |
11,8 |
26 |
2 650 |
0,027 |
|
U3 |
29 |
0,5 |
0,65 |
8,6 |
37 |
3 400 |
0,06 |
|
U4 |
28 |
0,57 |
0,62 |
7,9 |
35 |
3 600 |
0,07 |
|
U5 |
32 |
0,8 |
1,5 |
10,1 |
27 |
2 710 |
0,046 |
Для оценки эффективности была использована программа Efficiency Measurement System (EMS) [15], реализующая метод АСФ. В результате решения получены целевые значения TV изменений параметров, которые следует выполнить для повышения эффективности АТС в анализируемом сценарии (табл. 3).
Таблица 3
Table 3
Целевые корректировки параметров АТС
Targeted adjustments of AV parameters
|
DMU |
Изменение параметров TV, % |
|||||||
|
F1 |
F2 |
F3 |
F4 |
Z1 |
Z2 |
Z3 |
|
|
|
А1 |
–10,03 |
13,53 |
13,53 |
13,53 |
32,08 |
5,58 |
22,19 |
|
|
А2 |
1,36 |
–41,62 |
–29,94 |
–31,66 |
0 |
11,66 |
0 |
|
|
А3 |
–46,57 |
–38,32 |
–41,38 |
64,25 |
0 |
27,42 |
0 |
|
|
А4 |
0,65 |
0,65 |
–2,4 |
–19,96 |
0 |
2,9 |
36,89 |
|
|
А5 |
–1,12 |
–73,66 |
–1,12 |
–6,41 |
17,14 |
0 |
0 |
|
|
А6 |
5,84 |
3,27 |
–15,61 |
–23,73 |
27,57 |
23,67 |
0,71 |
|
|
А7 |
–2,32 |
–2,32 |
–11,05 |
–7,71 |
0 |
44,54 |
44,94 |
|
|
А8 |
14,02 |
14,02 |
14,02 |
–2,98 |
33,65 |
0 |
74,04 |
|
|
U1 |
20,44 |
60,45 |
30,69 |
22,16 |
0 |
52,58 |
5,16 |
|
|
U2 |
4,81 |
4,81 |
–38,23 |
–31,43 |
0 |
0 |
63,43 |
|
|
U3 |
13,09 |
–43,59 |
–5,04 |
13,09 |
0 |
0 |
80,32 |
|
|
U4 |
5,99 |
–42,41 |
5,99 |
–19,55 |
47,73 |
11,03 |
29,93 |
|
|
U5 |
6,3 |
–34,8 |
4,37 |
–15,82 |
27,4 |
0 |
36,22 |
|
Например, из табл. 3 следует, что для достижения границы эффективности автомобилем А3 следует уменьшить коэффициент простоя F3 до 0,6 % при неизменных средней скорости Z1 автомобиля
и удельном грузоперемещении Z3. При этом также уменьшается потребление топлива F1 и коэффициент сходов с маршрута F2. Однако эти меры вызывают довольно значительный рост (64 %) удельных затрат F4 на перемещение груза.
Сравнительная оценка эффективности АТС в различных сценариях виртуальных испытаний
Для сценариев производственно-логистической системы определен набор входных параметров X1–X5 и набор выходных параметров Y1 и Y2 для формирования задачи АСФ. Описание этих параметров приведено в табл. 4 (ТО – техническое обслуживание, АА – автономный автомобиль, АК – автономный комбайн).
Таблица 4
Table 4
Входные и выходные параметры для оценки сценариев
Input and output parameters for scenario evaluation
|
Параметр |
Описание параметра |
|
X1 |
Средняя удельная стоимость ТО АА, руб./км |
|
X2 |
Средняя удельная стоимость ТО АК, руб./га |
|
X3 |
Расход топлива АА, л/100 км |
|
X4 |
Расход топлива АК, л/га |
|
X5 |
Задержка планового срока завершения графика работ, % |
|
Y1 |
Коэффициент использования АА |
|
Y2 |
Отношение веса убранного зерна к расчетному значению, % |
Величина Y1 определяется как отношение перевезенного груза зерна к максимально возможному объему при полном заполнении кузовов автомобилей во всех поездках. Параметр Y2 = (Vt / Vc) · 100 % показывает, какая доля расчетного веса Vc зерна на поле вывозится при данном сценарии, где Vt – вес убранного и вывезенного зерна. Вес Vc определяется по ожидаемой урожайности зерновой культуры на полях.
Проводился многофакторный анализ восьми DMU, а именно сценариев S1–S8 для производственных работ, выполняемых парком автономных автомобилей и комбайнов на пяти полях с заданной сетью дорог. В табл. 5 показаны значения входных и выходных параметров для сценариев на одном периоде времени.
Таблица 5
Table 5
Значения входных и выходных параметров для оценки сценариев
Values of input and output parameters for scenario evaluation
|
DMU |
X1 |
X2 |
X3 |
X4 |
X5 |
Y1 |
Y2 |
|
S1 |
8,1 |
13,2 |
32,3 |
15,1 |
8 |
0,75 |
98 |
|
S2 |
6,9 |
10,6 |
34,5 |
16,2 |
2,8 |
0,94 |
98,7 |
|
S3 |
5,7 |
14 |
30 |
15,5 |
5 |
0,9 |
98 |
|
S4 |
7,3 |
9,3 |
27 |
14,9 |
4,3 |
0,96 |
99 |
|
S5 |
6,2 |
8,7 |
33 |
15,8 |
1,8 |
0,99 |
94 |
|
S6 |
8,2 |
11,8 |
32,5 |
16,2 |
8,2 |
0,85 |
84,5 |
|
S7 |
25 |
15,1 |
38,6 |
20 |
12 |
0,78 |
80 |
|
S8 |
7,8 |
10,4 |
26 |
15,2 |
6,3 |
0,82 |
93 |
В результате решения задачи получены значения критерия эффективности для каждого сценария (табл. 6).
Таблица 6
Table 6
Эффективность сценариев
The effectiveness of scenarios
|
Сценарии |
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
S7 |
S8 |
|
Эффективность, % |
97,68 |
98,53 |
116,16 |
115,22 |
163,83 |
81,44 |
60,53 |
97,55 |
Согласно табл. 6, эффективны сценарии S3, S4, S5. Целевые изменения TV неэффективных сценариев S1, S2, S6, S7, S8 для вывода их на границу эффективности приведены в табл. 7, в которой величины δ равны процентным значениям увеличения или уменьшения исходных параметров из табл. 5.
Таблица 7
Table 7
Целевые корректировки параметров сценариев
Targeted adjustments to scenario parameters
|
Параметры |
Сценарии |
|||||||||
|
S1 |
S2 |
S6 |
S7 |
S8 |
||||||
|
TV |
δ |
TV |
δ |
TV |
δ |
TV |
δ |
TV |
δ |
|
|
X1 |
7,41 |
–0,69 |
6,89 |
–0,01 |
5,49 |
–0,21 |
15,8 |
–9,2 |
7,05 |
–0,75 |
|
X2 |
9,51 |
–3,69 |
9,34 |
–1,26 |
12,62 |
–1,38 |
13,52 |
–1,58 |
8,99 |
–1,41 |
|
X3 |
27,48 |
–4,82 |
32,3 |
–2,14 |
27,4 |
–2,56 |
24,57 |
–5,43 |
26 |
0 |
|
X4 |
15,17 |
0 |
16,2 |
0 |
15,5 |
0 |
20 |
0 |
14,37 |
–0,83 |
|
X5 |
4,44 |
–3,56 |
2,8 |
0 |
2,13 |
–2,87 |
8,23 |
–3,77 |
4,19 |
–2,11 |
|
Y1 |
0,77 |
0,2 |
1,0 |
0,07 |
0,85 |
0 |
0,78 |
0 |
0,9 |
0,08 |
|
Y2 |
98 |
0 |
98,7 |
0 |
92,4 |
7,9 |
91,6 |
11,6 |
93 |
0 |
Например, для сценария S7 необходимо выполнить значительное уменьшение удельных затрат на техническое обслуживание (на 9,2 руб./км для автомобиля и на 1,58 руб./га для комбайна) (см. табл. 7). Кроме того, следует сократить задержку завершения графика работ до 8 %. В этом случае интегральная оценка эффективности сценария S7 сравняется с другими сценариями. Анализ других сценариев проводится аналогичным образом.
Обсуждение
Разделение многофакторного анализа результатов виртуальных испытаний на две задачи позволяет вносить коррективы в проектные и организационные решения по техническому обслуживанию парка транспортных средств до начала производства и эксплуатации. Различные сценарии «проигрываются» на имитационных моделях с заданием исходных данных как по внешним условиям эксплуатации, так и по техническим и производственным показателям комплекса АТС. В то же время при моделировании одного сценария использование метода АСФ позволяет оценить ключевые параметры отдельных АТС.
Преимущество применения иерархических сетей Петри в сочетании с многофакторным анализом АСФ заключается в том, что на разных уровнях детализации используются цифровые двойники агрегатов АТС на стохастических сетях. В результате имитируется воздействие множества случайных факторов и затем проводится сравнительная оценка эффективности функционирования системы в целом.
Заключение
Применение разработанной методики виртуальных испытаний и многофакторной оценки эффективности транспортных средств дает возможность осуществить переход от профилактического к прогнозному техническому обслуживанию, что является современной тенденцией при организации технического обслуживания киберфизических систем [5, 16]. Таким образом, формируются наборы организационных, технических и финансовых мероприятий по ТОиР, которые передаются эксплуатирующим предприятиям одновременно с поставкой изготавливаемых автономных транспортных средств.
1. Möller D. P. F., Vakilzadian H., Haas R. E. From In-dustry 4.0 towards Industry 5.0. Proc. 2022 IEEE Interna-tional Conference on Electro Information Technology (Mankato, MN, USA). IEEE Xplore, 2022, pp. 61-68.
2. Babkin A. V., Fedorov A. A., Liberman I. V., Klachek P. M. Industriia 5.0: poniatie, formirovanie i razvitie [Industry 5.0: concept, formation and development]. Ekonomika promyshlennosti. Russian Journal of Industrial Economics, 2021, vol. 14 (4), pp. 375-395.
3. Novak P., Kadera P., Wimmer M. Model-based engineering and virtual commissioning of cyber-physical manufacturing systems – Transportation system case study. Proc. 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol. IEEE Xplore, 2017, pp. 1-4.
4. Orlov S. P., Biziukova E. E., Iakovleva A. E. Virtu-al'nye ispytaniia agregatov dlia virtual'nogo vvoda v pro-izvodstvo robotizirovannogo avtomobilia [Virtual testing of units for virtual commissioning of a robotic car]. Vestnik Samarskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Tekhnicheskie nauki, 2021, vol. 29 (1), pp. 46-57.
5. Shcherbakov M. V., Sai Van K. Arkhitektura sistemy predskazatel'nogo tekhnicheskogo obsluzhivaniia slozhnykh mnogoob"ektnykh sistem v kontseptsii Industrii 4.0 [The architecture of the predictive maintenance system for complex multi-object systems in the concept of Industry 4.0]. Programmnye produkty i sistemy, 2020, no. 2, pp. 186-194.
6. Gubanov N. G., Mikheev Iu. V., Odintsov V. P., Akhtiamov R. N., Morev A. S. Arkhitektura sistemy diag-nostiki i prognozirovaniia tekhnicheskogo sostoianiia robotizirovannogo transportnogo sredstva [Architecture of the diagnostic and forecasting system for the technical condition of a robotic vehicle]. Problemy upravleniia i modelirovaniia v slozhnykh sistemakh: trudy XXI Mezhdunarodnoi konferentsii. Samara, OOO «Ofort», 2019. Pp. 171-174.
7. Orlov S. P., Susarev S. V., Kravets O. Ya., Morev A. S. Information system of agricultural robotic KAMAZ cars. Journal of Physics: Conference Series, 2019, vol. 1399 (3), p. 033020 (1-5).
8. Orlov S. P., Volkhonskaia E. E. Sistemnye modeli parka avtonomnykh transportnykh sredstv dlia virtual'nykh ispytanii pri organizatsii tekhnicheskogo obsluzhivaniia [System models of the fleet of autonomous vehicles for virtual tests in the organization of maintenance]. Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Upravlenie, vychislitel'naia tekhnika i informatika, 2023, no. 3, pp. 7-16.
9. Volkhonskaia E. E., Orlov S. P. Modelirovanie siste-my avtonomnykh transportnykh sredstv v protsesse vir-tual'nogo zapuska v ekspluatatsiiu [Simulation of an autonomous vehicle system in the process of virtual commissioning]. Matematicheskie metody v tekhnologiiakh i tekhnike, 2022, no. 1, pp. 97-103.
10. Cooper W. W., Seiford L. M., Zhu J. Data Envelopment Analysis: History, Models, and Interpretations. Handbook on Data Envelopment Analysis. US, New York, Springer, 2011. Pp. 1-39.
11. Sowlati T., Paradi J. C. Establishing the “practical frontier” in data envelopment analysis. Omega, 2004, vol. 32 (4), pp. 261-272.
12. Morgunov E. P., Morgunova O. N. Mnogomernaia klassifikatsiia slozhnykh ob"ektov na osnove otsenki ikh effektivnosti [Multidimensional classification of complex objects based on an assessment of their effectiveness]. Vestnik NII SUVPT: sbornik nauchnykh trudov. Pod obshchei redaktsiei prof. N. V. Vasilenko. Krasnoiarsk, 2003. Iss. 14. Pp. 222-240.
13. Khammershmidt M., Makarov A., Shcherbak A. Primenenie metoda analiza sredy funktsionirovaniia (ASF) dlia otsenki effektivnosti deiatel'nosti biznes-struktur predpriiatiia [Application of the method of analysis of the operating environment (OEA) to assess the effectiveness of the business structures of the enterprise]. Prakticheskii marketing, 2012, no. 3 (181), pp. 15-20.
14. Iakovleva A. E., Susarev S. V., Orlov S. P. Analiz effektivnosti robotizirovannoi sistemy sel'skokhoziaistven-nykh avtomobilei [Analysis of the effectiveness of the robotic system of agricultural vehicles]. Sistemy upravleniia i informatsionnye tekhnologii, 2021, no. 3 (85), pp. 94-100.
15. EMS: Efficiency Measurement System. Data Envelopment Analysis (DEA) Software. Available at: http://www. holger-scheel.de/ems/ (accessed: 15.01.2024).
16. Sang G. M., Xu L., Vrieze P., Bai Y., Pan F. Predictive Maintenance in Industry 4.0. Proceedings of the 10th International Conference on Information Systems and Technologies (ICIST' 2020). Lecce, Italy. 2020. Article No. 29. Pp. 1-11.
