












Novosibirsk, Novosibirsk, Russian Federation
Russian Federation
Russian Federation
Russian Federation
Russian Federation
Russian Federation
Russian Federation
The article considers a full-scale comparative experiment conducted in 2020 in the water area of the Novosibirsk reservoir on the simultaneous drift of six marine life rafts with a capacity of 6 people each. Each raft was equipped with one of the developed hydrodynamic anchors (HDA); one raft had a standard parachute floating anchor; one raft had no means of preventing drift. The wing hydrodynamic armature showed good results in reducing the drift velocity. To develop design methods of this kind, hydrodynamic forces were determined in the direct experimental basin of the Siberian State University of Water Transport (SSUWT) by towing with different speeds and angles of attack. According to the tests conducted in the direct experimental pool of the police Department, HDA the coefficients of hydrodynamic forces were obtained. It is noted that the HDA is made in full size, which does not require recalculation according to similarity criteria; the values of the coefficients show an unstable dependence on the towing speed, which is explained by the influence of errors of the experimental method and required averaging of the results. To substantiate the possibility of using the averaging method, the results of numerical modeling of the work of HDA carried out in the Ansys Fluent program are used, which revealed a very weak dependence of the coefficients on the flow rate. On this basis, a decision was made on the possibility of averaging coefficients related to flow velocities v ≥ 0.2 m/s, at which the spread of coefficient values is relatively small. The averaged values of the coefficients obtained in the physical experiment are approximated in their ranges of angles of attack by quadratic polynomials to smooth out the results and facilitate their use in mathematical models of the device operation.
hydrodynamic anchor, physical experiment, coefficients of hydrodynamic forces, approximation of empi-rical coefficients, the drift of the raft
Введение
В рамках проблемы совершенствования средств предотвращения опрокидывания и уменьшения дрейфа спасательных плотов с целью снижения риска гибели спасающихся и ускорения их обнаружения при проведении поисково-спасательных операций в ФГБОУ ВО «Сибирский государственный университет водного транспорта» (СГУВТ) в 2019–2022 гг. выполнялась работа, поддержанная государственным заказом № 110-00018-21-00 на 2021 г. В этой работе в качестве основного рабочего органа для предотвращения опрокидывания плота на крутых волнах с опрокидывающимся гребнем предложено использовать якоря присоединенной массы (ЯПМ), а для предотвращения дрейфа – гидродинамические якоря (ГДЯ). Разработано, изготовлено и испытано несколько разновидностей таких якорей; часть из них защищена патентами на изобретения Российской Федерации [1–4]. Для обеспечения возможности всплывшему спасательному плоту оставаться вблизи места гибели судна разработана конструкция контейнера для размещения плота и его ГДЯ, предваряющая развертывание и начало работы ГДЯ еще до окончания процесса газонаполнения плота [5]. Разработана также конструкция для стабилизации диаметральной плоскости ГДЯ относительно направления дрейфа плота [6]. Таким образом, разработан необходимый минимум технических средств, обеспечивающих работоспособность системы снижения дрейфа плота.
Натурный сопоставительный эксперимент по дрейфу плотов
Многие нюансы реальной работы системы «плот – трос – якорь» удалось обнаружить и осознать в процессе проведенного на Новосибирском водохранилище натурного сопоставительного эксперимента 2020 г. по одновременному дрейфу шести спасательных плотов [7] (рис. 1).

Рис. 1. Дрейф плотов во время сопоставительного эксперимента на Новосибирском водохранилище
Fig. 1. Drift of rafts during a comparative experiment at the Novosibirsk reservoir
В ходе натурного сопоставительного эксперимента на Новосибирском водохранилище по дрейфу плотов, оснащенных разными устройствами снижения дрейфа, включая штатное в виде подводного парашютного купола, для дальнейших исследований выбор пал на ГДЯ, содержащий твердотельные крылья из гнутого листа с ограничителями углов поворота крыльев [1]. Общий вид экспериментального образца крыльевого ГДЯ, состоящего из трех килей, между которыми установлены две пары гнутых листовых крыльевых профилей, приведен на рис. 2.

Рис. 2. Общий вид экспериментального образца крыльевого ГДЯ
Fig. 2. General view of the experimental wing sample HDA
Обоснование экспериментальных исследований гидродинамического якоря
Помимо продолжения технического совершенствования ГДЯ, дальнейшие работы необходимо вести в направлении создания методологии проектирования ГДЯ с заданными параметрами конечного результата по снижению дрейфа плота с ГДЯ. В этом направлении возникает задача разработки математической модели, описывающей взаимодействие качающегося на волнении и дрейфующего под действием ветра и ветро-волнового течения плота и взаимодействующего с ним через якорный трос ГДЯ. В этом взаимодействии определяющая роль принадлежит гидродинамическим силам, возникающим на ГДЯ при его перемещении якорным тросом.
Теоретическое определение гидродинамических сил вследствие полной нестационарности движения можно отнести к задачам неблизкой перспективы, а инженерные методы проектирования нужны уже в настоящее время. Для определения гидродинамических сил понадобилось проведение специально поставленных экспериментов в прямом опытовом бассейне СГУВТ с различными образцами ГДЯ, выполненными в натурную величину с эффективной площадью около 0,4 м2 (рис. 3).
Рис. 3. Испытания опытного образца крыльевого ГДЯ
в опытовом бассейне СГУВТ: момент протяжки
крыльевого ГДЯ на рабочем ходу
Fig. 3. Tests of the prototype of the wing housing HDA
in the experimental pool of the SSUWT: the moment
of pulling the wing housing HDA on the working stroke
По этой причине не требуется пересчета скоростей буксировки, и они назначались в соответствии со скоростями орбитального движения плота на волнении в разных фазах его периода.
Обработка результатов экспериментов
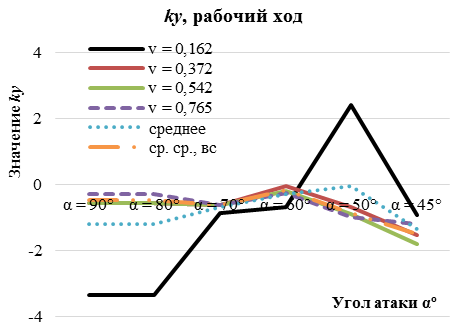
Обработка экспериментов, проведенных в опытовом бассейне для определения гидродинамических сил и моментов на крыльевом ГДЯ, свидетельствует о зависимости коэффициентов гидродинамических сил (КГС) не только от угла атаки α ГДЯ, но и от скорости v потока (скорости буксировки).
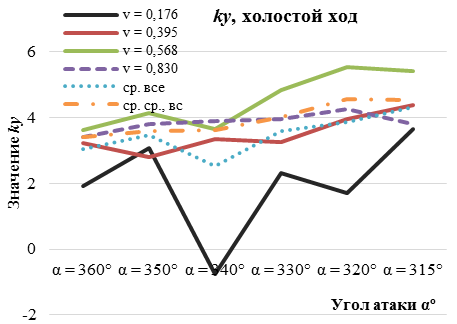
Особенность зависимости проявилась в том, что наиболее нестабильными оказались значения КГС при малых скоростях потока v, тогда как при средних и высоких скоростях значения КГС достаточно близки (рис. 4).
а б
Рис. 4. Коэффициент поперечной силы ky(α, v) в физическом эксперименте:
а – в диапазоне углов атаки рабочего хода ГДЯ; б – в диапазоне углов атаки холостого хода ГДЯ
Fig. 4. The coefficient of transverse force ky(α, v) in a physical experiment:
a – in the range of angles of attack of the working stroke of the HDA;
б – in the range of angles of attack of the idling stroke of the HDA
Сравнение с аналогичной зависимостью, полученной в численном эксперименте [8], проведенном путем решения замкнутой системы уравнений Навье – Стокса, уравнения неразрывности, уравнения состояния среды и уравнения баланса полной энергии в пакете Ansys Fluent [2], определило, что зависимость значений КГС от скорости потока незначительна (рис. 5), что позволяет осреднять значения КГС по аргументу скорости потока v. Поскольку численный эксперимент тоже имеет ограниченную достоверность из-за ограничений программ пакета Ansys Fluent по допустимому числу ячеек разбиения сплошной среды, из-за преобразования уравнений Навье – Стокса в уравнения Рейнольдса и использования гипотезы Буссинеска для моделирования явлений турбулентности, его результаты также необходимо проверять физическим экспериментом.
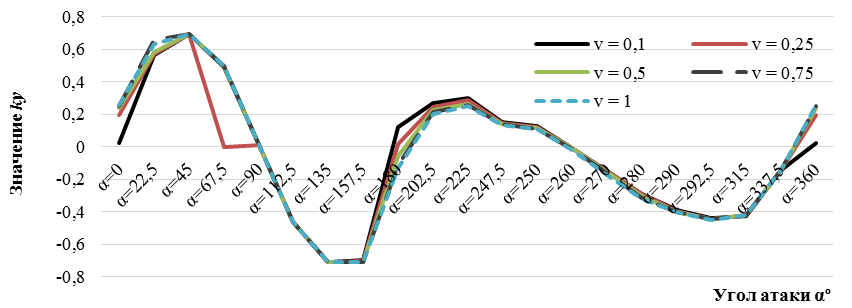
Рис. 5. Коэффициент поперечной силы ky(α, v) в численном эксперименте
Fig. 5. The coefficient of transverse force ky(α, v) in a numerical experiment
В то же время результат численного эксперимента о практической независимости КГС от скорости потока может быть использован в физическом эксперименте (имеющем свои пределы достоверности) как необходимость освободить результаты КГС от влияния скорости v, например путем осреднения значений КГС по скорости. И возникает вопрос о том, для каких скоростей допустимо осреднение, поскольку это связано с погрешностью получаемых средних величин.
В результате анализа всего пакета величин КГС kx, ky, km к осреднению приняты КГС, полученные на скоростях v > 0,2 м/с.
Аппроксимация коэффициентов гидродинамических сил
Осредненные значения КГС желательно иметь в аналитическом виде хотя бы в практически актуальном диапазоне углов атаки α. Этот диапазон для рабочего хода ГДЯ определен в пределах α = 45 ÷ 90º, а для холостого хода в пределах α = 315 ÷ 360º. Аппроксимация проведена квадратичным полиномом вида
k = aα2 + bα + c,
где a, b, c – коэффициенты аппроксимации, полученные способом наименьших квадратов по осредненным значениям КГС (таблица).
Коэффициенты аппроксимации коэффициентов гидродинамических сил,
осредненных по средним и высоким скоростям буксировки
Coefficients of approximation of the coefficients of hydrodynamic forces averaged over medium
and high towing speeds
|
Коэффициент сил |
Вид движения |
Диапазон α |
Коэффициенты аппроксимации |
||
|
a |
b |
c |
|||
|
kx |
Рабочий ход |
45 ÷ 90º |
–0,000295 |
0,049853 |
–0,790234 |
|
Холостой ход |
315 ÷ 360º |
–0,000110 |
0,075549 |
–13,466018 |
|
|
ky |
Рабочий ход |
45 ÷ 90º |
–0,001167 |
0,172871 |
–6,709887 |
|
Холостой ход |
315 ÷ 360º |
0,000460 |
–0,337709 |
65,331868 |
|
|
km |
Рабочий ход |
45 ÷ 90º |
–0,055082 |
6,694316 |
–157,043826 |
|
Холостой ход |
315 ÷ 360º |
–0,005884 |
4,068123 |
–702,020606 |
|
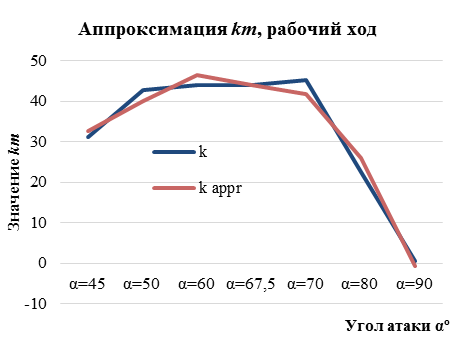
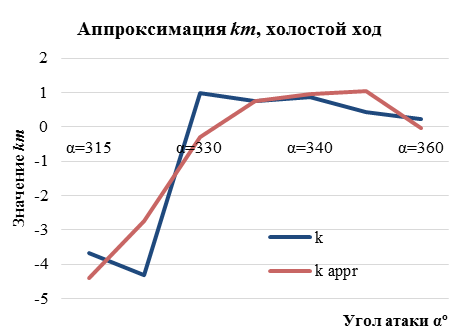
Графическое сравнение экспериментальных осредненных значений КГС и их аппроксимированных значений представлено на рис. 6.
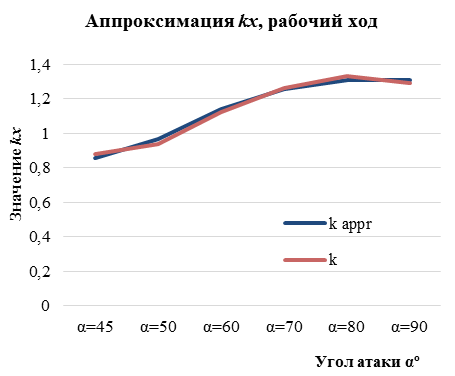
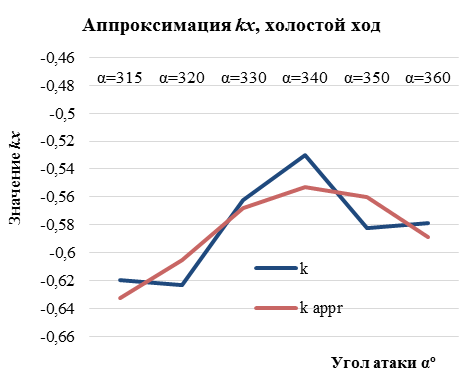
а б
Рис. 6. Аппроксимация коэффициентов гидродинамических сил kx, ky, km в диапазоне углов атаки ГДЯ:
а – аппроксимация коэффициента kx, рабочий ход; б – аппроксимация коэффициента kx, холостой ход
Fig. 6. Approximation of the coefficients of hydrodynamic forces kx, ky, km in the range of angles of the HDA attack:
a – approximation of the coefficient kx, working stroke; б – approximation of the coefficient kx, idling;
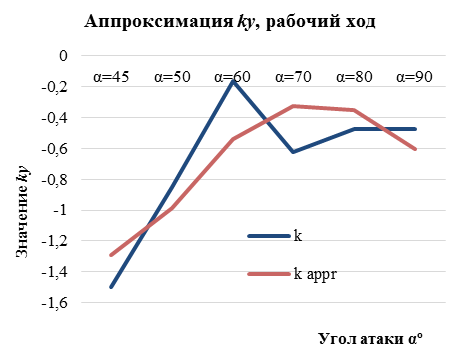
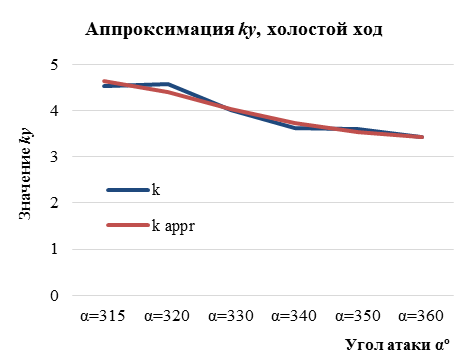
в г
д е
Рис. 6 (окончание). Аппроксимация коэффициентов гидродинамических сил kx, ky, km
в диапазоне углов атаки ГДЯ: в – аппроксимация коэффициента ky, рабочий ход;
г – аппроксимация коэффициента ky, холостой ход; д – аппроксимация коэффициента km, рабочий ход;
е – аппроксимация коэффициента km, холостой ход
Fig. 6 (Ending). Approximation of the coefficients of hydrodynamic forces kx, ky, km in the range of angles
of the HDA attack: в – approximation of the coefficient ky, working stroke; г – approximation ky coefficient, idle stroke;
д – approximation of the km coefficient, working stroke; e – approximation of the km coefficient, idle stroke
Заключение
Таким образом, результат аппроксимации КГС позволяет сгладить не имеющий физического обоснования (кроме погрешностей экспериментального метода) разброс экспериментальных значений КГС. Аналитическая форма представления нелинейных по своей физической природе коэффициентов гидродинамических сил упрощает применение результатов эксперимента при математическом моделировании работы ГДЯ в составе системы «плот – трос – ГДЯ».
1. Sichkarev V. I., Kuz'min V. V. Stabilizator pozitsionirovaniia plavaiushchego ob"ekta [Stabilizer for positioning a floating object]. Patent RF, no. 2743456, 18.02.2021.
2. Sichkarev V. I., Cherenovich A. S., Kuz'min V. V. Gidrodinamicheskii iakor' [Hydrodynamic anchor]. Patent RF, no. 2751044, 07.07.2021.
3. Sichkarev V. I., Cherenovich A. S. Gidrodinamicheskii iakor' [Hydrodynamic anchor]. Patent RF, no. 2785310, 06.12.2022.
4. Sichkarev V. I., Cherenovich A. S., Titov S. V., Konovalov V. V., Rozov I. V. Gidrodinamicheskii iakor' [Hydrody-namic anchor]. Patent RF, no. 2792851, 27.03.2023.
5. Sichkarev V. I., Cherenovich A. S. Konteiner spasatel'nogo plota (varianty) [Life Raft container (options)]. Patent RF, no. 2779886, 14.09.2022.
6. Sichkarev V. I., Cherenovich A. S. Stabilizator polozheniia neupravliaemogo ob"ekta [Stabilizer for the position of an uncontrolled object]. Patent RF, no. 2785309, 06.12.2022.
7. Sichkarev V. I., Titov S. V., Konovalov V. V., Cherenovich A. S., Ivanov I. A., Plaskeev A. V., Dmitriev A. S., Shev-tsov I. V., Sakhnov D. Iu. Provedenie naturnogo sopostavitel'nogo eksperimenta s gidrodinamicheskimi iakoriami spasatel'nykh plotov na Novosibirskom vodokhranilishche [Conducting a full-scale comparative experiment with hydrodynamic anchors of life rafts at the Novosibirsk reservoir]. Nauchnye problemy transporta Sibiri i Dal'nego Vostoka, 2022, no. 3, pp. 28-39.
8. Sichkarev V. I., Khokhriakov A. N., Pokaliukhin Iu. S., Babenko A. V. Komp'iuternoe modelirovanie raboty kryla gidrodinamicheskogo iakoria [Computer simulation of the hydrodynamic armature wing operation]. Nauchnye problemy transporta Sibiri i Dal'nego Vostoka, 2022, no. 1, pp. 20-28.
