









Russian Federation
Russian Federation
Russian Federation
Russian Federation
The article considers simulating the main diesel cooling pump control system in the MATLAB Simulink envi-ronment. Simulating is performed to demonstrate the operation of the upgraded main diesel cooling system. The need to modernize the pump control system comes from the fact that in the original system there is no possibility of adjusting the speed of electric motor rotation, the coolant temperature is regulated only according to the readings from the temperature sensor at the outlet of the main diesel engine, and adjusting the rotation speed of the electric motor in relation to the operating mode of the main diesel engine is not provided. The upgraded control system consists of four sensors (coolant temperature sensor located at the outlet of the main diesel engine, coolant temperature sensor located at the main diesel inlet, sea water temperature sensor and tachogenerator), a fuzzy logic controller and a frequency converter. The frequency converter changes the magnitude and frequency of the voltage supplied to the electric motor, depending on the magnitude of the signal from the fuzzy logic controller. The value of the signal from the fuzzy logic controller depends on the value of the signals from the temperature sensors and the tachogenerator and is determined in accordance with the algorithm written in Simulink. The new system will make it possible to cool the engine more efficiently, due to taking into account the operating mode of the main diesel engine (rotation speed) and will maintain the recommended temperature difference between the coolant at the inlet and outlet of the main diesel engine.
frequency converter, controller, coolant, temperature sensor, tachogenerator, diesel
Введение
Система электропривода насоса охлаждения главного дизеля судна (рис. 1) состоит:
а) из четырех датчиков:
– датчика температуры охлаждающей жидкости, расположенного на трубопроводе, выходящем из главного дизеля;
– датчика температуры охлаждающей жидкости, расположенного на трубопроводе, входящем в главный дизель;
– датчика температуры забортной воды;
– тахогенератора, измеряющего скорость вращения вала главного дизеля;
б) нечеткого контроллера (НК), задача которого – выдавать аналоговый токовый сигнал величиной
4–20 мА в преобразователь частоты (ПЧ), в соответствии с программой, описанной в среде MATLAB;
в) преобразователя частоты, задача которого – регулировать скорость вращения электродвигателя насоса в зависимости от сигнала с НК;
г) электродвигателя насоса – асинхронного двигателя (АДКЗ) с двойной беличьей клеткой.
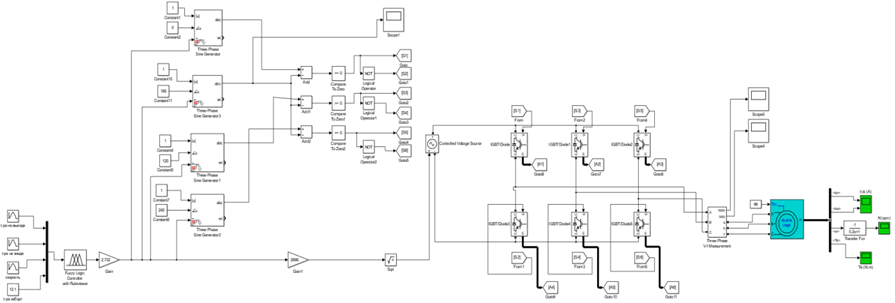
Рис. 1. Система «Датчики-ПЛК-ПЧ-АДКЗ» [1]
Fig. 1. Sensors-PLC-FC-ADSCR system [1]
Моделируется разомкнутая система охлаждения, т. к. на данный момент этот тип системы охлаждения наиболее распространен [2].
Модель АДКЗ
В среде Simulink модель АДКЗ представлена единым блоком Asynchronous Machine [3] (рис. 2–4).
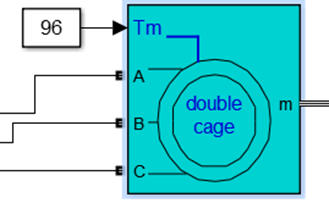
Рис. 2. АДКЗ с двойной беличьей клеткой в среде Simulink
Fig. 2. ADSCR with double squirrel cage in Simulink environment
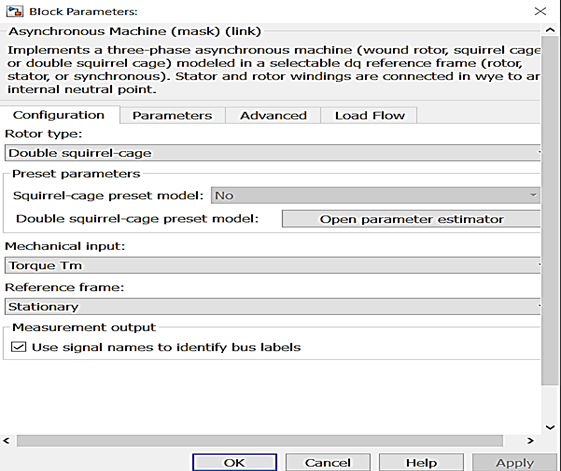
Рис. 3. Параметры АДКЗ, стр. 1
Fig. 3. ADSCR parameters, page 1
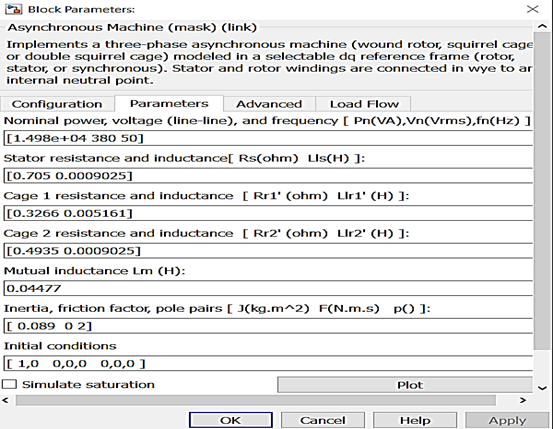
Рис. 4. Параметры АДКЗ, стр. 2
Fig. 4. ADSCR parameters, page 2
Параметры электродвигателя вводятся с помощью команды Open parameter estimator. На вход Tm подается момент нагрузки в виде константы.
С выхода m через Bus Selector подаются сигналы на блоки Scope, с помощью которых измеряемые величины отображаются в графическом виде.
Момент нагрузки, Н∙м, рассчитывается по формуле [4]
М = Р / w = 15 000 / 156 = 96,
где Р – активная мощность электродвигателя, Вт; w – номинальная скорость вращения электродвигателя, рад/с.
Модель ПЧ
Модель ПЧ [5] (рис. 5) представляет собой 2 блока – силовой блок (рис. 6) и блок управления (рис. 7).
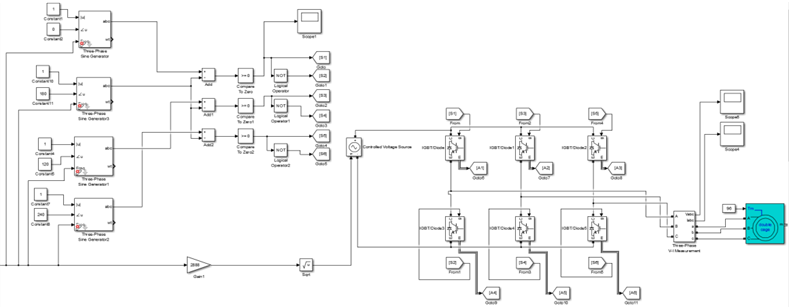
Рис. 5. Модель ПЧ
Fig. 5. FC model
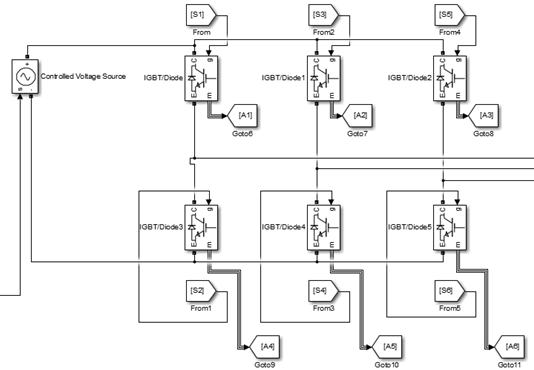
Рис. 6. Силовой блок ПЧ
Fig. 6. Power block of FC
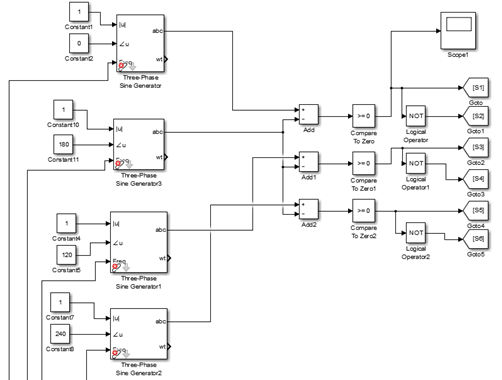
Рис. 7. Блок управления ПЧ
Fig. 7. FC control block
Силовой блок представляет собой 6 блоков IGBT/Diode, с которых переменное напряжение поступает на АДКЗ, а также блок Controlled Voltage Source. Блок управления представляет собой 4 блока Tree-Phase Sine Generator, а также набор блоков Goto и From, предназначенных для передачи сигналов для управления диодами.
Блок Controlled Voltage Source предназначен для подачи постоянного напряжения на блоки IGBT/Diode. На вход S подается сигнал, величина которого и является величиной выходного напряжения.
Частота открытия диодов зависит от частоты сигнала, подаваемого с блока From на вход g. Само напряжение на диоды подается в зависимости от полярности либо на вход С (+), либо на вход Е (–).
В блоке управления ключевую роль играют блоки Tree-Phase Sine Generator, т. к. именно с них выдается синусоидальный сигнал, который после преобразования и задает частоту открытия диодов. Чтобы блок Tree-Phase Sine Generator осуществлял выдачу сигнала по одной фазе, необходимо удалить в настройках два сигнала (рис. 8, 9) [6].
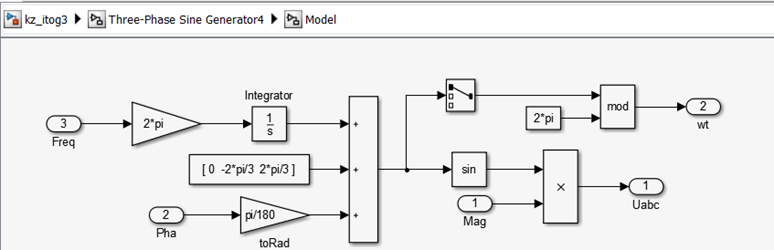
Рис. 8. Tree-Phase Sine Generator до изменения
Fig. 8. Tree-Phase Sine Generator before changing
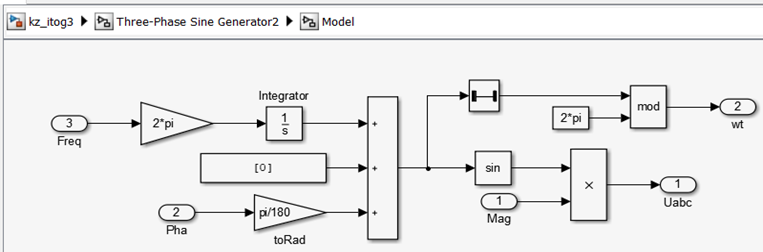
Рис. 9. Tree-Phase Sine Generator после изменения
Fig. 9. Tree-Phase Sine Generator after changing
На вход │u│ подается сигнал, задающий величину выходного сигнала с блока Tree-Phase Sine Generator. На вход < u подается сигнал, задающий начальный угол синусоиды. На вход Freq подается сигнал, задающий частоту синусоиды.
Модель НК
Модель НК [7] (рис. 10) представлена блоком Fuzzy Logic Controller with Ruleviewer, программа для которого прописана в программе MATLAB (рис. 11).
Рис. 10. Блок Fuzzy Logic Controller with Ruleviewer
Fig. 10. Block Fuzzy Logic Controller with Ruleviewer
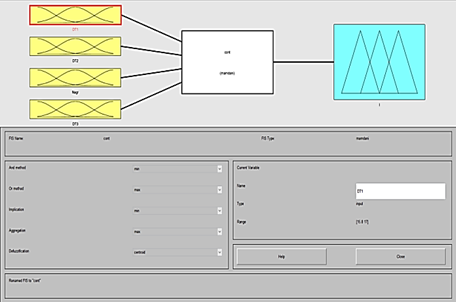
Рис. 11. Программа в Matlab для блока Fuzzy Logic Controller with Ruleviewer
Fig. 11. Software in Matlab for a block Fuzzy Logic Controller with Ruleviewer
Программа основана на изменении выходного сигнала в зависимости от комбинации и величины входных сигналов. Сигналы в блок Fuzzy Logic Controller with Ruleviewer поступают с четырех датчиков:
– DT1 – датчик температуры охлаждающей жидкости на выходе из главного дизеля;
– DT2 – датчик температуры охлаждающей жидкости на входе в главный дизель;
– speed – тахогенератор;
– DT3 – датчик температуры забортной воды.
Сигналы с датчиков температуры изменяются по току (4–20 мА), а с тахогенератора – по напряжению (0–10 В). Величины сигналов, поступающие в контроллер, рассчитаны исходя из опытов, проведенных в лаборатории.
Для каждого датчика было установлено соответствие между численными значениями входной переменной системы нечеткого вывода и значением функции принадлежности (рис. 12–15).
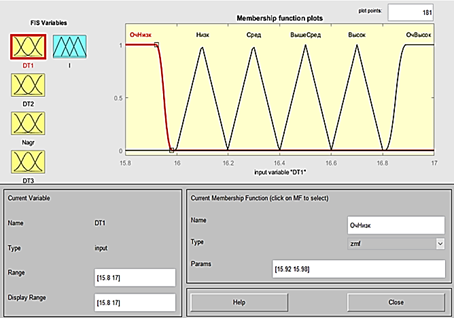
Рис. 12. Фаззификация блока DT1
Fig. 12. Fuzzification of the DT1 block

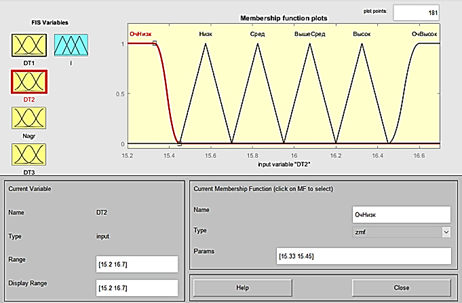
Рис. 13. Фаззификация блока DT2
Fig. 13. Fuzzification of the DT2 block
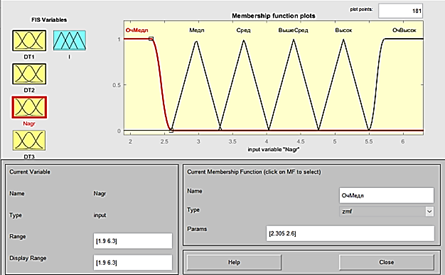
Рис. 14. Фаззификация блока Nagr
Fig. 14. Fuzzification of the block Nagr
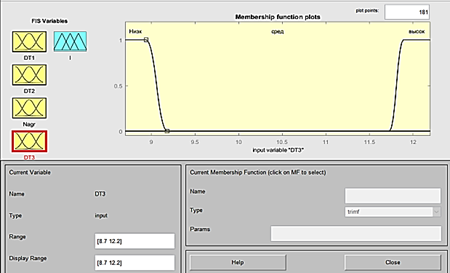
Рис. 15. Фаззификация блока DT3
Fig. 15. Fuzzification of the DT3 block
Принцип построения участков функции для каждого датчика одинаковый.
Исключение составляет DT3 (см. рис. 15).
Для него принято условие оказания воздействия только при низкой (от 0 до 5 °С) и при высокой (от 32 до 37 °С) температуре забортной воды.
Фаззификация выходного сигнала представлена на рис. 16.
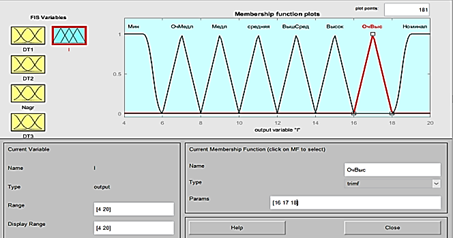
Рис. 16. Фаззификация выходного сигнала
Fig. 16. Fuzzification of the output signal
Принцип выбора конкретного участка определяется прописанными правилами (рис. 17).
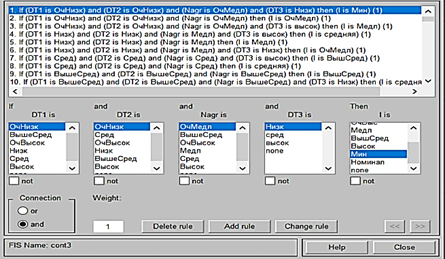
Рис. 17. Правила определения выходного сигнала
Fig. 17. Rules for determining the output signal
Для преобразования сигнала с контроллера используются 3 блока:
– блок Gain с коэффициентом 2.5 – для преобразования сигнала в величину частоты, подаваемую на вход Freq блока Tree-Phase Sine Generator (рис. 18);
– блоки Gain и Sqrt для преобразования сигнала с блока Gain с коэффициентом 2.5 в величину напряжения, в соответствии с законом скалярного управления ПЧ U ^ 2 / f = const (рис. 19).
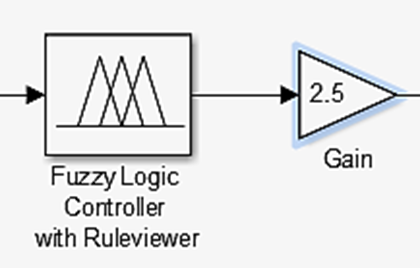
Рис. 18. Блок для преобразования сигнала
в величину частоты
Fig. 18. Block for converting a signal
into a frequency value
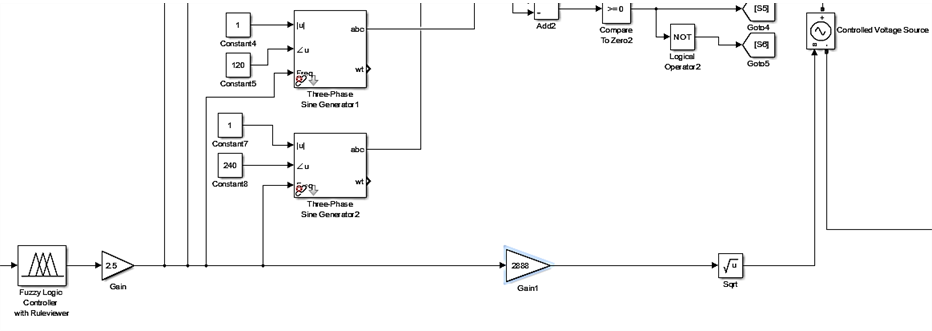
Рис. 19. Блоки Gain и Sqrt для преобразования сигнала в величину напряжения
Fig. 19. Gain and Sqrt Blocks for converting a signal to a voltage value
Модели датчиков
В данной системе датчики представлены в виде 4-х блоков [2] (рис. 20).
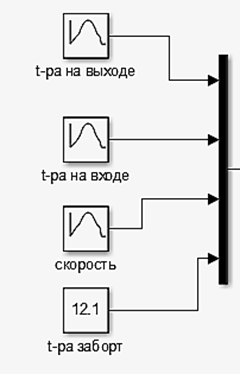
Рис. 20. Датчики в системе «Датчики-ПЛК-ПЧ-АДКЗ»
Fig. 20. Sensors in the system of sensors-PLC-FC-ADSCR
DT1–2 и Nagr представлены в виде блоков Repeating Sequence Interpolated – для того чтобы отобразить изменение параметров во времени.
DT3 представлен в виде блока Constant (т. к. температура забортной воды в реальных условиях не изменяется резко).
Блок Mux необходим для передачи сигналов с датчиков в блок Fuzzy Logic Controller with Ruleviewer.
Работа системы
На рис. 21 приведен график изменения скорости вращения асинхронного двигателя при повышении температуры охлаждающей жидкости на выходе из главного дизеля и на входе в главный дизель, вызванном увеличением скорости вращения главного дизеля, на рис. 22 приведен график изменения напряжения, подаваемого на электродвигатель.
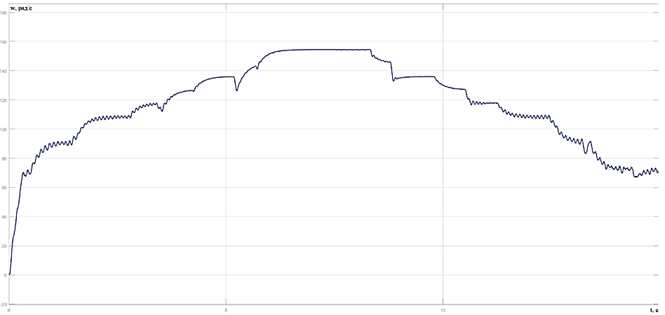
Рис. 21. Изменение скорости вращения электродвигателя
Fig. 21. Changing the speed of rotation of the electric motor
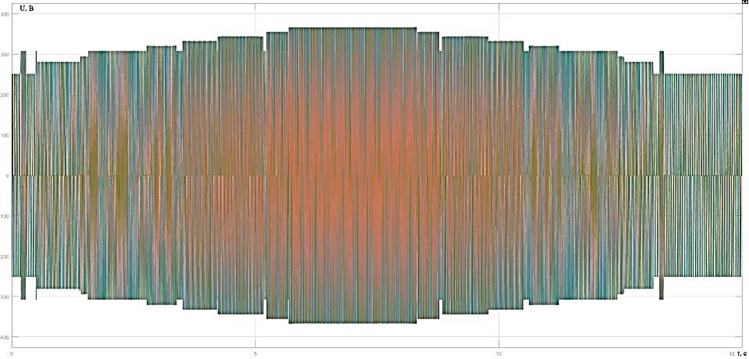
Рис. 22. График изменения напряжения
Fig. 22. Graph of voltage change
На графике есть 8 участков увеличения скорости вращения и снижения скорости вращения. Изменение скорости вызвано изменением величины сигналов, поступающих с датчиков, и происходит в соответствии с прописанной программой управления.
В результате выполненного исследования удалось смоделировать работу системы управления насосом охлаждения главного двигателя судна на базе контроллера нечеткой логики в соответствии с прописанной программой управления, основанной на величине сигналов с датчиков температуры и скорости вращения.
Заключение
Разработана модель модернизированной системы управления насосом охлаждения главного дизеля на базе программного комплекса MATLAB Simulink, которая точно отображает переходные процессы при регулировании скорости вращения электродвигателя, позволяет создать программу управления для контроллера нечеткой логики
и обеспечить регулировку вращения электродвигателя в соответствии с заданной программой.
1. Matlab & Simulink. Proektirovanie mehatronnyh sistem na PK. SPb.: KORONA-Vek, 2008. 368 s.
2. Bezyukov O. K., Zhukov V. A., Pulyaev A. A. Ustanovka dlya issledovaniya kavitacionnyh processov v sistemah ohlazhdeniya sudovyh dizeley // Nauchnye problemy vodnogo transporta. 2020. № 64. S. 235-247.
3. Model' ADKZ. URL: http://course.omgtu.ru/kompmodelelectro (data obrascheniya: 25.01.2023).
4. Romanenko N. G. Metodicheskie ukazaniya k prakticheskim zanyatiyam po disciplinam «Elektricheskiy privod». Astrahan', 2018. 40 s.
5. Model' PCh. URL: https://topuch.ru/racionalenoe-ispolezovanie-vodnih-i-toplivno-energeticheskih-r/index4.html (data obrascheniya: 27.01.2023).
6. Golovko S. V. Modelirovanie avtomaticheskoy sistemy upravleniya sudovoy elektrostancii s uchetom sostoyaniya oborudovaniya // Vestn. Astrahan. gos. tehn. un-ta. Ser.: Morskaya tehnika i tehnologiya. 2014. № 3. S. 58-63.
7. Tarasyan V. S. Paket Fuzzy logic toolbox for MATLAB: ucheb. posobie. Ekaterinburg: Izd-vo Ur-GUPS, 2013. 112 s.
