












Russian Federation
Russian Federation
Russian Federation
The article considers the methods of upgrading the system of cable supply from the vessel. The system controls operation of the electric motor, through which the cable is unwound from the reel, and regulates the position of the guide which delivers the cable into the water. The need to create an automatic system for laying cable from a ship, which will provide the minimal deformation and minimal cable consumption, is proved. The first system is designed to control the speed of the electric motor that unwinds the cable from the reel. Adjustment is carried out due to the signal from the tension sensor (current signal is 4 - 20 mA). The signal goes to the programmable logic controller. The analog output signal from the controller (the current signal also ranges within 4 - 20 mA) is fed to the frequency converter, which, in turn, changes the rotation speed of the electric motor in accordance with the prescribed program. The second system is designed to change the position of the guide delivering the cable overboard. The proposed system compensates for the change in the position of the cable in the water under the influence of the current. The adjustment is made depending on the signal from the angle change sensor, which will go to the programmable logic controller. The first system is considered in detail, its electrical circuit diagram and electrical functional diagram are presented, as well as other elements of the system (sensor, programmable logic controller). A description of the circuit operation is given
cable laying, system of cable feeding from a reel, system of changing the position of the guide, strain gauge, programmable logic controller
Введение
Укладка кабеля под водой с помощью кабелеукладочного судна – это сложный, важный и глобальный процесс, в осуществлении которого заинтересованы и задействованы многие компании и страны мира. Этот процесс необходим для осуществления деятельности многих отраслей современного мира, в частности военной, научно-исследовательской, для электроснабжения островов, морских нефтяных лабораторий и газовых платформ, выдачи электроэнергии с ветровых, волновых и приливных электростанций, передачи сигналов для осуществления телефонных разговоров и передачи интернет-данных.
В настоящий момент прокладка кабеля под водой – это наиболее распространенный и надежный, а зачастую единственный способ установления стабильных коммуникаций между континентами, электроснабжения городов, станций и лабораторий, отделенных водной преградой.
Укладка кабеля под водой – это не только важный глобальный, но и очень сложный и тяжелый процесс, поскольку глубина океана достигает в среднем 3,7 км, а протяженность кабельных линий может составлять несколько тыс. км.
Помимо осуществления ремонтных работ и мероприятий по поддержанию уже проложенных кабельных систем в рабочем состоянии, сегодня активно реализуется множество проектов по построению новых подводных сетей. Поскольку укладка кабеля под водой актуальна и важна в современных условиях, исследования способов модернизации в данном направлении необходимы и оправданы.
Описание системы
Рассмотрим новую систему подачи кабеля с кабелеукладочного судна. Кабелеукладочное судно East River – специализированное судно с модульной палубой, специально спроектированное для выполнения монтажа подводных силовых и оптоволоконных кабельных линий, в том числе на мелководных участках. С данного судна укладка осуществляется путем сматывания с барабана лебедки (рис. 1). При таком способе укладки, как правило, обеспечивается согласованная скорость укладки кабеля (скорость движения судна совпадает со скоростью схода кабеля) путем контролирования натяжения кабеля.
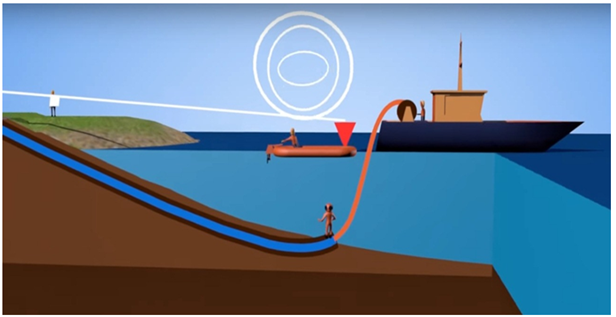
Рис. 1. Укладка кабеля под водой путем предварительного расположения кабеля на поверхности воды
Fig. 1. Laying the cable under water by preliminary placing the cable on the surface of the water
Модернизация существующего способа укладки кабеля с контролем его натяжения должна привести к более точному позиционированию кабеля на дне морских объектов и, как следствие, меньшему его расходу.
Повышение качества работы системы укладки кабеля с судна должно осуществляться посредством создания системы управления такого рода укладкой, состоящей из двух индивидуальных электроприводов с общим источником напряжения [1], с программным комплексом, разработанным И. А. Керестенем [2], направленным на регулирование скорости вращения электродвигателя, подающего кабель с бобины (регулирование будет осуществляться на основании величины токового сигнала с датчика натяжения кабеля), и на изменение положения направляющей (рис. 2, 3), обусловливающей изменение направления подачи кабеля в зависимости от скорости и направления течения (данный элемент будет введен впервые). Обе эти системы управления электроприводом являются замкнутыми [3].
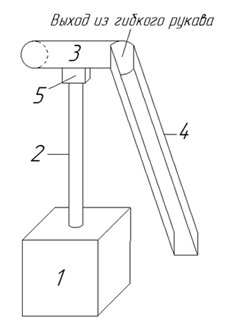
Рис. 2. Направляющая с регулировкой положения:
1 – электродвигатель; 2 – вал двигателя;
3 – гибкий рукав; 4 – направляющая;
5 – отсек для углового датчика положения
Fig. 2. Guide with position adjustment: 1 – electric motor;
2 – motor shaft: 3 – flexible sleeve;
4 – guide; 5 – capsule for the angular position sensor
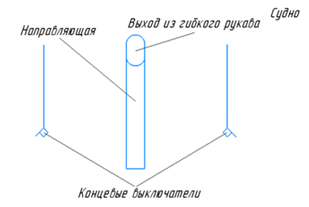
Рис. 3. Вид на направляющую со стороны кормы судна
Fig. 3. View of the guide from the stern of the vessel
В начальной системе кабель спускается с судна в воду со статичной направляющей. В модернизированной системе направляющая будет иметь возможность изменять свое положение на 90 град в горизонтальной плоскости (45 град влево или вправо) под давлением кабеля. С помощью направляющей будет корректироваться направление выдачи кабеля за счет плавного вращения электродвигателя. Регулировка движения электродвигателя будет осуществляться по сигналу с углового датчика положения, расположенного на валу двигателя в отсеке под направляющей. При изменении угла поворота направляющей будет изменяться величина сигнала с датчика. С целью ограничения траектории движения направляющей при достижении угла поворота в 45 град будет срабатывать концевой выключатель. Направляющая будет соединяться с лентой, подающей кабель, с помощью гибкого металлического рукава. Данные с датчиков будут поступать в блок сбора информации. В нем будет осуществляться обработка полученных данных (с помощью установленной программы) и выдача соответствующих сигналов на преобразователи частоты (ПЧ). На основании данных, полученных с блока сбора информации, ПЧ выдают управляющие воздействия на двигатели, с помощью которых осуществляется подача кабеля с бобины и изменение положения направляющей для кабеля. Структурная схема системы управления представлена на рис. 4.
Помимо этого, следуя современным тенденциям, необходимо применение современного оборудования, которое можно будет интегрировать в уже имеющуюся на судне автоматизированную систему сбора, хранения и обработки информации [4]. Это необходимо для отслеживания технического состояния оборудования, определения требуемого количества запасных частей и принадлежностей (ЗИП), их номенклатуры, своевременной закупки ЗИП с минимизацией затрат на хранение и выполнение своевременного ремонта.
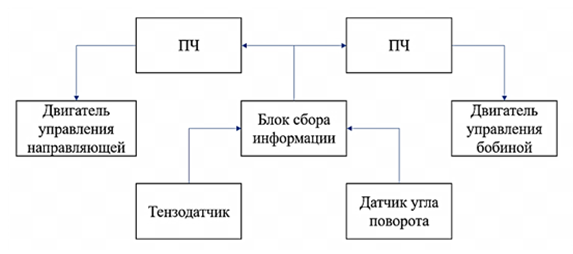
Рис. 4. Структурная схема системы управления
Fig. 4. Block diagram of the control system
В настоящей статье более подробно рассмотрим систему регулирования скорости вращения электродвигателя, подающего кабель с бобины. Эта система позволит разматывать кабель, избегая излишних перегрузок для него. Данная система будет состоять из тензодатчика, блока сбора информации, ПЧ и двигателя.
Элементы системы
Кабельный тензодатчик СВ200 [5] (рис. 5) используется для измерения нагрузки натяжения, приложенной к кабелю. Система валов для измерения натяжения с указанием приложения сил представлена на рис. 6.
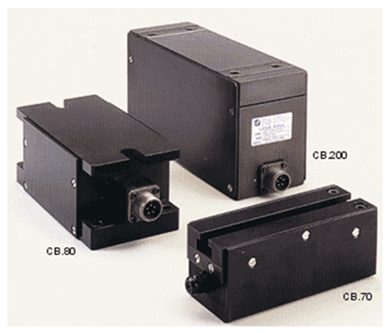
Рис. 5. Кабельные тензодатчики типа CB
Fig. 5. Cable strain gauges of CB type
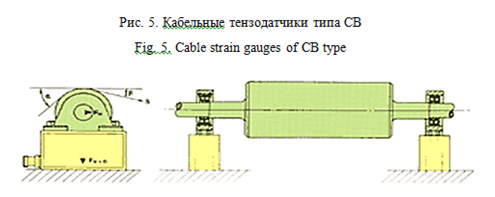
Рис. 6. Вал с датчиком для измерения натяжения
Fig. 6. Shaft with a tension sensor
Принцип работы датчика состоит в натяжении кабеля, которое вызывает изгиб тензобалки – чувствительного элемента датчика. Вектор изгиба (рис. 7) равен биссектрисе угла материала, проходящего по измерительному валику. Значение этой силы равно натяжению кабеля. Измеренное значение натяжения поступает в контроллер, который будет выдавать соответствующее управляющее воздействие на ПЧ.
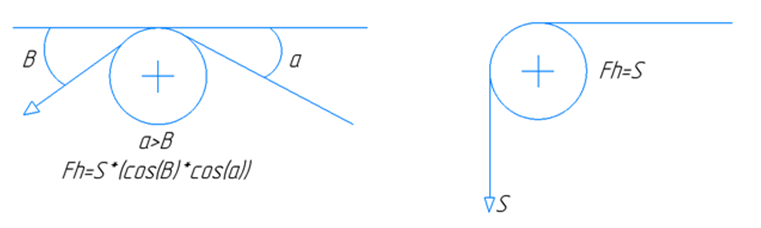
Рис. 7. Направление сил в системе
Fig. 7. Direction of forces in the system
Блок сбора информации представлен в данной системе программируемым логическим контроллером (ПЛК). В него будут поступать данные с датчика нагрузки и датчика угла поворота, на основании которых контроллер будет выдавать соответствующее управляющее воздействие. Для этой системы подойдет программируемый контроллер GCAN-PLC-400/510/511 [6] (рис. 8); данный контроллер и все последующее оборудование имеют морские сертификаты в соответствии с требованиями Российского морского регистра судоходства.
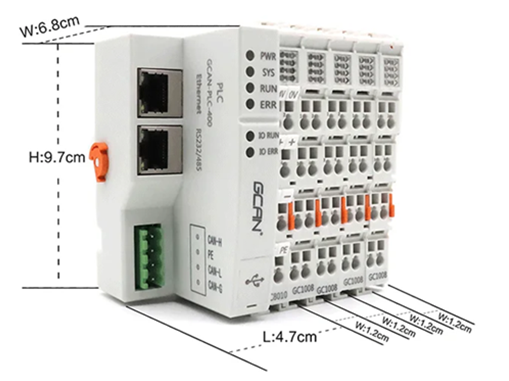
Рис. 8. Программируемый логический контроллер GCAN-PLC-400/510/511
Fig. 8. Programmable Logic Controller GCAN-PLC-400/510/511
Функциональная и принципиальная электрические схемы
На основании приведенных выше данных нами были разработаны функциональная схема модернизированной системы (рис. 9) подачи кабеля и электрическая принципиальная схема (рис. 10).
Напряжение в силовую цепь подается после замыкания автоматического выключателя QF1, а в цепь управления – после замыкания автоматического выключателя QF2.
Для того чтобы запустить ПЧ, необходимо нажать кнопку SB2 [7], в результате чего питание поступит на катушку реле K1 (после чего замкнутся контакты K1.1 (обеспечивающий постановку K1 под напряжение) и K1.2 (подающий команду на включение ПЧ) и разомкнется контакт K1.3 (в случае потери питания на K1 на ПЧ будет сигнал об отключении)) и на блок питания (БП), предназначенный для преобразования переменного напряжения (220 В) в постоянное напряжение (24 В), которое будет подаваться на ПЛК.
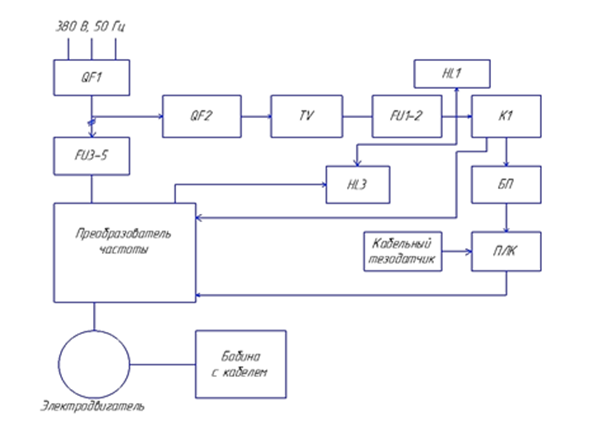
Рис. 9. Функциональная схема системы регулирования скорости вращения электродвигателя,
отвечающего за выдачу кабеля
Fig. 9. Functional diagram of the system regulating the rotation speed of the electric motor feeding the cable
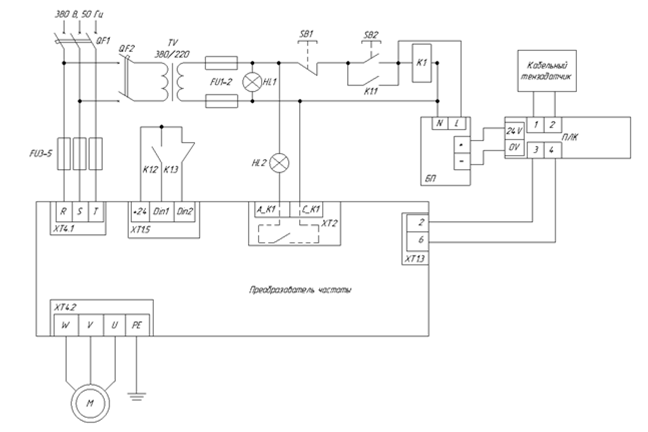
Рис. 10. Электрическая принципиальная схема системы регулирования скорости вращения электродвигателя,
отвечающего за выдачу кабеля
Fig. 10. Electrical schematic diagram of the system regulating the rotation speed of the electric motor feeding the cable
В ПЛК будет поступать токовый сигнал с кабельного тензодатчика. Сигнал с ПЛК поступит в ПЧ. В зависимости от величины сигнала будет изменяться частота напряжения, подаваемая с ПЧ на электродвигатель (чем больше сигнал, тем больше частота напряжения).
Помимо этого, в схеме установлены лампы: HL1 сигнализирует о наличии напряжения в сети, HL2 – о наличии аварии в ПЧ после замыкания контактов А_K1 и С_K1 (замыкаются в случае аварии).
Предохранители FU1–2 предназначены для защиты цепи управления от короткого замыкания со стороны низкого напряжения трансформатора TV. Предохранители FU3–5 предназначены для дополнительной защиты ПЧ от короткого замыкания (устанавливаются по рекомендации завода изготовителя).
Выводы
1. На данный момент разработана модель направляющей, отвечающей за изменение направления подачи кабеля.
2. Разработана система управления электроприводом для направляющей.
3. Представлен способ модернизации системы регулирования скорости вращения отвечающего за выдачу кабеля электродвигателя, основанный на изменении скорости вращения электродвигателя в зависимости от силы натяжения кабеля и минимизирующий деформацию кабеля при прокладке.
4. Разработанная система управления выполнена на базе современного оборудования, которое можно будет интегрировать в уже имеющуюся на судне автоматизированную систему сбора, хранения и обработки информации, что позволит отслеживать техническое состояние системы.
1. Drachev G. I. Teoriia elektroprivoda [Electric drive theory]. Cheliabinsk, Izd-vo IuUrGU, 2005. Part 1. 209 p.
2. Keresten' I. A. Matematicheskoe modelirovanie protsessov ukladki kabelia pod vodoi: dis. … kand. tekhn. nauk [Mathematical modeling of cable laying under water: Diss. … Cand. Tech. Sci.]. Saint-Petersburg, 2019. 120 p.
3. Epifanov A. P., Malaichuk L. M., Gushchinskii A. G. Elektroprivod [Electric drive]. Saint-Petersburg, Lan' Publ., 2012. 400 p.
4. Kulagin A. V. Formirovanie informatsionnykh potokov pri diagnostirovanii sudovykh energeticheskikh usta-novok [Formation of information flows during diagnostics of ship power plants]. Nauchnye problemy vodnogo transporta, 2022, no. 70 (1), pp. 77-86.
5. Tenzodatchik [Strain gauge]. Available at: http://www.roll2roll.biz/images/stories/re/pdf/re_datchiki_nagruzki_obshchij. pdf (accessed: 10.12.2022).
6. Programmiruemyi logicheskii kontroller [Programmable logic controller]. Available at: https://www.gcanbus.com/products/plc-con-ru (accessed: 10.12.2022).
7. Romanenko N. G., Golovko S. V., Satenov K. N., Zhumanazarov M. P. Primenenie preobrazovatelia chastoty v kachestve istochnika pitaniia sudovogo elektrooborudovaniia [Use of the frequency converter as a power supply of marine electric equipment]. Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriia: Morskaia tekhnika i tekhnologiia, 2016, no. 1, pp. 77-84.
