












Russian Federation
Russian Federation
The article considers the specific features of radar observations of the surrounding navigation situation in ice radars (IR) in polar latitudes and the reasons of their possible decreasing effectiveness. There is described a negative effect of the radio waves received by IR due to their reflection from hydrometeorological formations that occupy a large area of the scanned navigation space. The possible ways of improving the IR operation and creating the necessary conditions are analyzed. It has been inferred that in the case of observing the small-sized objects against the background of a strong extended hydrometeorological interference, digital processing of radar data slightly improves functioning of ice locators. It has been found out that in order to improve detecting small targets and measuring their parameters, it is necessary to ensure the safety of the radar from possible overload caused by the interference at the stage of primary processing of radar information (before using a digital filter). The structure of the device is proposed, which allows not only partial weakening the hydrometeorological interference in the IR operation, but also suppressing this interference. It is stated that improving the locator noise immunity during its operation is achieved by using the additional blocks in its composition that quickly detect short-term pulses caused by reflection from small-sized targets in the processed radar signal and convert them into a form in which it is possible to almost completely compensate for continuous interference. The method of mathematical modeling is used to study the effectiveness of the proposed device by measuring the signal-to-noise ratio achieved in it, the reaction time, and the structure of radar signals after their processing. According to the analysis results of the mathematical experiment there have been made the conclusions about the lack of factors limiting the possibility of using the proposed device as part of IR and the optimal variant of its implementation.
ice radar, overload attenuation device, hydrometeorological objects, small-sized targets, detector of interference
Введение
В настоящее время при совершении рейсов в Арктической зоне на судах все большее применение получают ледовые радиолокационные станции (РЛС), которые позволяют улучшать радиолокационное наблюдение как за одиночными целями, так и за ледовыми образованиями различных типов. Это улучшение достигается за счет специальной цифровой обработки радиолокационного сигнала, позволяющей повысить четкость контуров целей на дисплее РЛС, увеличить вероятность обнаружения льда, обеспечить возможность штурману определить его сплоченность в ближней зоне судна [1]. Поскольку такая обработка сигнала производится после его усиления, то все указанные выше преимущества могут быть сведены к минимуму или полностью исключены в случае воздействия на приемник РЛС помех достаточно высокого уровня, которые уменьшают контраст полезного сигнала.
В арктических акваториях наиболее сложная помеховая обстановка складывается в условиях низкой видимости, когда в атмосфере присутствуют протяженные гидрометеорологические образования (заряды снега, дождь, полоса тумана). Все эти объекты опасны для РЛС тем, что дают достаточно хорошее отражение радиолокационного сигнала и приводят к воздействию на ее усилитель напряжения большой величины и длительности [2]. Вследствие таких ситуаций наступает перегрузка усилителя, при которой обнаружение кратковременных импульсов от малоразмерных целей становится практически невозможным даже в случае применения цифровой обработки радиолокационного сигнала.
Для улучшения качества обработки радиолокационных сигналов в подобных ситуациях в отечественной и зарубежной научной литературе предлагаются различные способы: использование двух и более независимых приемных каналов [3], измерение координат и параметров движения ледовых образований в миллиметровом диапазоне частот [2], обнаружение малоразмерных целей и других объектов, дающих слабый отраженный сигнал на фоне помех, на основе адаптивного выбора порогового уровня радиолокационного сигнала для принятия решения о его наличии или отсутствии в смеси с помехами [4]. Также возможно достаточно существенное подавление помех на основе совместного использования данных, поступающих от нескольких РЛС [5]. Однако все перечисленные методы требуют значительного удорожания радиолокационной аппаратуры и внедрения относительно сложного программного обеспечения для реализации предлагаемых алгоритмов обработки радиолокационных сигналов. Кроме этого, высокая эффективность каждого из указанных методов будет достигаться только в случае полного отсутствия перегрузки в каждом из используемых приемных каналов РЛС. Несмотря на то что современные ледовые РЛС оснащены устройством ослабления перегрузки (УОП), полезный сигнал на выходе их усилителя может оказаться недостаточным для его эффективной обработки при помощи цифрового фильтра.
Для устранения указанного недостатка необходимо применить в ледовых РЛС дополнительную додетекторную обработку радиолокационных сигналов, которая позволит не только сохранить на прежнем уровне соотношение «сигнал – помеха» на входе станции, но и повысить его за счет подавления помех, вызванных отражениями зондирующих импульсов от гидрометеорологических объектов. Данная дополнительная обработка заключается в том, что в функциональную схему УОП РЛС включаются блоки, позволяющие достаточно быстро обнаруживать появление полезных сигналов на фоне длительных помех и выдавать команды на изменение коэффициента усиления, существенно ослабляя влияние такого рода помех.
Функциональная схема усовершенствованного УОП
В составе УОП, применяемого в ледовых РЛС, действуют два амплитудных детектора с различной степенью инерции: один из них является сигнальным детектором (СД), он реагирует и на полезный сигнал, и на помеху – формирует напряжение, пропорциональное сумме их огибающих; второй из детекторов – детектор помех (ДП) – настроен таким образом, что напряжение на его выходе будет напрямую зависеть только от величины помехи.
Сформированный ДП сигнал изменяет степень усиления РЛС с помощью электронного регулятора, который на основе входного напряжения снижает величину усиления приемного устройства в обратной зависимости от значения амплитуды помехи, поступающей в антенну ледового радиолокатора.
Данный принцип работы не позволяет УОП ослаблять сигнал, вызванный отражением зондирующих импульсов от гидрометеорологических объектов. Причина этого недостатка состоит в неспособности амплитудных детекторов выделять огибающую высокочастотных импульсов без значительных искажений.
Огибающая импульса на входе ледовой РЛС включает в себя кратковременные фронт и срез, а также относительно длительную вершину (рис. 1, а). Реакция инерционного детектора на такой сигнал приведена на рис. 1, б. Срез выходного сигнала детектора оказывается сильно «затянутым» по времени. Уменьшение его длительности возможно за счет снижения степени инерционности детектора, но в этом случае вершина импульса подвергается сильным искажениям. Следовательно, амплитудный детектор при работе в составе УОП оказывается не в состоянии быстро обнаружить момент окончания импульсного сигнала на фоне помех от гидрометеорологических образований.
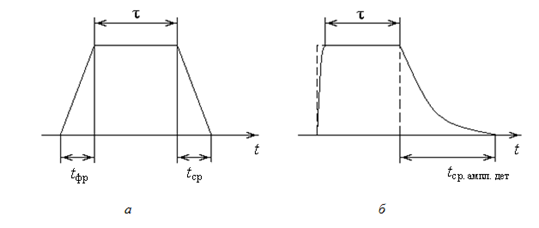
Рис. 1. Структура огибающей радиоимпульса (а) и выходной сигнал амплитудного детектора РЛС
при обработке прямоугольного радиоимпульса (б)
Fig. 1. Structure of the radio pulse envelope (a) and the output signal of the amplitude detector of the radar station
in processing a rectangular radio pulse (б)
Для повышения эффективности УОП ледовых РЛС необходимо внести в его функциональную схему следующие изменения (рис. 2). Импульсный сигнал, принятый ледовой РЛС при одновременном воздействии помех, вызванных гидрометеорологическими объектами, подается на усилитель, коэффициент передачи которого управляется электронным регулятором.
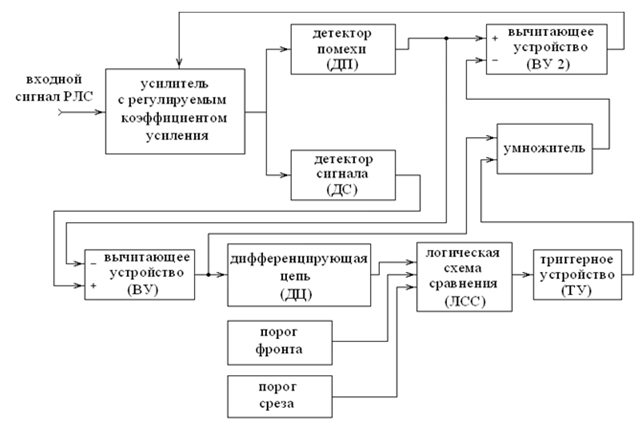
Рис. 2. Функциональная схема усовершенствованного УОП
Fig. 2. Functional diagram of the advanced overload mitigation device
Сигнал с выхода усилителя поступает на СД и ДП. После выделения амплитуд входных напряжений при помощи вычитающего устройства (ВУ) вычисляется их разность, которая представляет собой сигнал, пропорциональный амплитуде радиоимпульса, вызванного отражением зондирующего импульса от малоразмерного объекта. После этого данное выходное напряжение пропускается через дифференцирующую цепь (ДЦ), которая позволяет быстро «обнаружить» моменты формирования фронта и среза такого сигнала. Импульсы, сформированные ДЦ в моменты появления и окончания видеоимпульса, подаются на первый вход логической схемы сравнения (ЛСС), сравнивающего их уровень с аналогичным параметром на втором его входе. На второй вход ЛСС поступает сигнал, уровень которого принимается за пороговый для фронта импульса. Третий вход ЛСС служит для формирования порогового уровня, соответствующего срезу импульса. В случае если напряжение на выходе ДЦ становится больше порогового уровня фронта импульса, ЛСС сформирует кратковременный прямоугольный импульс логической единицы в момент появления на выходе СД видеоимпульса малой длительности (т. е. на вход ледовой РЛС поступил сигнал, вызванный отражением зондирующего импульса от малоразмерного объекта). В момент времени, когда выходное напряжение ДЦ уменьшится ниже уровня порога, установленного для среза видеоимпульса на выходе детектора ледовой РЛС, ЛСС также сформирует кратковременный импульс логической единицы, который означает завершение сигнала, отраженного от малоразмерного объекта. Логическая схема сравнения передает сформированные импульсы на триггерное устройство (ТУ), которое сформирует единичный импульс, длительность и положение которого на оси времени точно соответствуют аналогичным параметрам радиоимпульса, вызванного отражением зондирующих сигналов ледовой РЛС от малоразмерного объекта. За счет применения цепи ДЦ – ЛСС – ТУ сигнал на выходе ТУ будет представлять импульс, форма которого практически совпадает с прямоугольным видеоимпульсом. При этом уровень этого импульса соответствует логической единице. Триггерное устройство передает сигнал на умножитель, который формирует напряжение, уровень которого равен произведению выходных сигналов ТУ и ВУ, т. е. прямоугольный импульс, вершина которого совпадает с вершиной импульса сигнала, отраженного от малоразмерного объекта. Сформированный при помощи умножителя сигнал поступает на инвертирующий вход второго вычитающего устройства (ВУ2) одновременно с выходным напряжением ДП. Тогда уровень выходного сигнал ВУ2 будет крайне незначительно отличаться от аналогичного параметра помех, которые формируются при переизлучении импульсов крупными объектами. В ситуации, когда в ходе локационного наблюдения пространства в луч антенны ледовой РЛС попадает малоразмерная цель (даже если она расположена внутри зоны наличия рассматриваемых помех), уровень выходного сигнала ВУ2 быстро снизится на величину, равную огибающей напряжения, вызванного переизлучением радиоволн малоразмерной целью. Поэтому в любом возможном случае напряжение, формируемое ВУ2, является оптимальным сигналом, регулирующим коэффициент передачи усилителя ледовой РЛС.
Рассмотренная функциональная схема УОП, помимо защиты локатора от перегрузки, наступающей в случае отражения зондирующих импульсов от гидрометеорологических объектов, обеспечивает также возможность существенного подавления таких помех, сохраняя практически неизменным уровень сигналов, обусловленных отражением импульсов РЛС от малоразмерных целей.
Результаты испытаний
На рис. 3–6 приведены результаты вычислительного эксперимента, в ходе которого моделировался прием полезного сигнала в ледовой РЛС на фоне мощной помехи без применения УОП. На рис. 3 представлен радиолокационный сигнал, который подвергался обработке в усовершенствованном УОП и стандартном варианте реализации УОП.
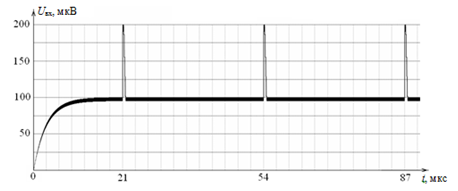
Рис. 3. Огибающая напряжения на входе ледовой РЛС
Fig. 3. Envelope voltage at the input of the ice radar
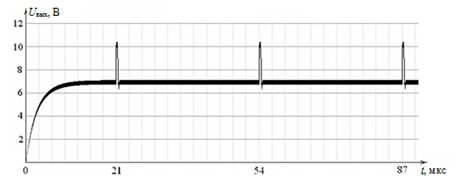
Рис. 4. Импульсы напряжения на выходе ледовой РЛС без применения УОП
Fig. 4. Voltage pulses at the output of the ice radar without using the overload mitigation device
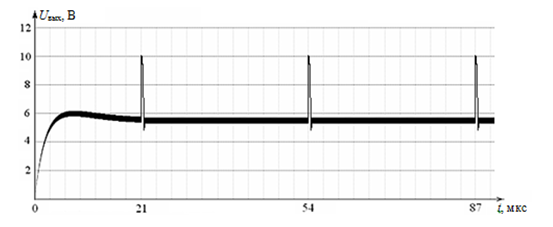
Рис. 5. Импульсы напряжения на выходе ледовой РЛС в случае применения стандартного УОП
Fig. 5. Voltage pulses at the output of the ice radar in case of using a standard overload mitigation device
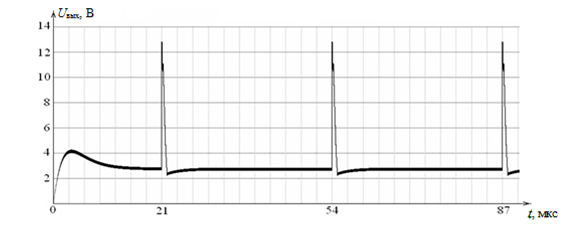
Рис. 6. Импульсы напряжения на выходе ледовой РЛС в случае применения усовершенствованного УОП
Fig. 6. Voltage pulses at the output of the ice radar with using the improved overload mitigation device
Осциллограммы на рис. 4 и 5 соответствуют напряжению на выходе ледовой РЛС без использования УОП и в случае применения стандартного УОП соответственно. График, представленный на рис. 6, иллюстрирует сигнал на выходе ледовой РЛС при использовании усовершенствованного УОП. Для удобства анализа результатов моделирования на рис. 7–9 приведены увеличенные фрагменты рис. 4–6 соответственно, на которых изображены первые импульсы указанных напряжений.
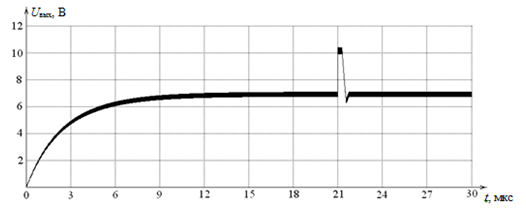
Рис. 7. Импульс напряжения на выходе ледовой РЛС без применения УОП (фрагмент рис. 4)
Fig. 7. Voltage pulse at the output of the ice radar without using the overload mitigation device (Fragment of Fig. 4)
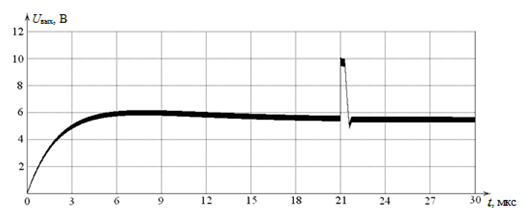
Рис. 8. Импульс напряжения на выходе ледовой РЛС в случае применения стандартного УОП (фрагмент рис. 5)
Fig. 8. Voltage pulse at the output of the ice radar with using the standard overload mitigation device (Fragment of Fig. 5)
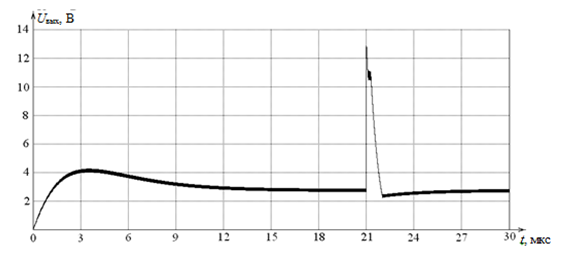
Рис. 9. Импульс напряжения на выходе ледовой РЛС в случае применения усовершенствованного УОП,
включающего ДЦ, ЛСС и ТУ (фрагмент рис. 6)
Fig. 9. Voltage pulse at the output of the ice radar with using the improved overload mitigation device including
a differentiating circuit, a comparison logic circuit and a trigger device (Fragment of Fig. 6)
В указанных экспериментах моделировалось радиолокационное наблюдение за объектом, находящимся на удалении приблизительно 6 морских миль на фоне помех, вызванных наличием гидрометеорологических образований, величина которых равнялась амплитуде полезных сигналов, что соответствует наступлению критичного режима радиолокационных наблюдений. Разрешающая способность ледовой РЛС составляла 150 м, при которой принимаемый импульс имел достаточную длительность для обеспечения возможности его обнаружения в приемнике ледовой РЛС.
Согласно графику на рис. 7 в результате воздействия помех, обусловленных отражениями зондирующих импульсов от гидрометеорологических объектов, отношение «сигнал – помеха» уменьшается приблизительно до величины 43 % (аналогичный параметр для первого каскада ледовой РЛС составлял единицу). Применение стандартного УОП в тех же условиях (см. рис. 8) позволяет повысить отношение «сигнал – помеха» до 67 %. Согласно графику на рис. 8 в случае применения в ледовой РЛС стандартного УОП период времени, необходимый для ослабления помехи, составляет более 6 мкс, за который ее уровень успевает возрасти приблизительно до 80 % от ее максимального значения. Следовательно, ослабление такой помехи достигается, но эффективность работы УОП в случае воздействия более сильной помехи окажется крайне низкой. Результаты моделирования усовершенствованного УОП (см. рис. 9) доказывают, что в аналогичных условиях эксплуатации отношение «сигнал – помеха» на выходе ледовой РЛС повышается до 160 %. Таким образом, применение предложенной функциональной схемы УОП позволяет более чем в 2 раза повысить эффективность ледовых РЛС в сложной помеховой обстановке. При этом график на рис. 9 подтверждает, что в случае применения в ледовой РЛС усовершенствованного УОП период времени, необходимый для ослабления помехи, составляет 3 мкс, за который ее уровень успевает возрасти приблизительно до 60 % от ее максимального значения. После данного момента времени помеха начинает подавляться, а минимальный ее уровень составит примерно 62 % от ее значения в момент полного срабатывания УОП.
Следовательно, рассматриваемая помеха подавляется более чем в 2 раза, поэтому эффективность работы ледовой РЛС в случае использования усовершенствованного УОП повышается минимум в 2,4 раза, а при благоприятных ситуациях (импульсы, отраженные от малоразмерных целей, принимаются с задержкой, превышающей время реакции усовершенствованного УОП примерно на 6 мкс) отношение «сигнал – помеха» может превышать аналогичный параметр для стандартной ледовой РЛС в 4,5 раза.
Выводы
Предложенная структура усовершенствованного УОП позволяет достичь следующих преимуществ (по сравнению с традиционными вариантами реализации ледовых РЛС):
1. Использование ДЦ повышает быстродействие УОП более чем на 65 %, что не только предотвращает последствия перегрузки РЛС, а гарантированно подавляет помехи, вызванные отражением зондирующих импульсов от гидрометеорологических образований.
2. Усовершенствованное УОП в незначительной степени искажает вершину импульсов в начале их длительности, однако этот эффект совершенно не препятствует их дальнейшей обработке в ледовых РЛС, поскольку основными информативными параметрами радиолокационного сигнала являются момент появления импульса и его длительность, которые сохраняются неизменными в предложенном варианте реализации устройства.
3. Техническая реализация предложенного варианта усовершенствованного УОП не требует значительного усложнения аппаратной части ледовых РЛС или их стоимости, т. к. рассмотренная структура усовершенствованного УОП производит обработку радиолокационного сигнала после его основного усиления и детектирования, т. е. сигнал на входе УОП является низкочастотным и достаточно высоким по уровню, что позволяет реализовать предложенную защиту ледовых РЛС в цифровой форме (в виде дополнительного программного обеспечения).
1. Pristavka «Del'ta» [Receiver Delta]. AO «Ravenstvo». Available at: http://www.rawenstvo.ru/ru/products/radar/delta (accessed: 14.11.2022).
2. Nichiporenko N. T., Sivachenko B. N. Ispol'zovanie sovremennykh sudovykh navigatsionnykh RLS dlia opredeleniia maksimal'noi dal'nosti ledovogo pokrova [Using modern ship navigation radars to determine maximum range of ice sheet]. Ekspluatatsiia morskogo transporta, 2011, no. 3, pp. 34-36.
3. Baskakov A. I., Egorov V. V., Isakov M. V., Lukashenko Iu. I., Permiakov V. A. Sposob obnaruzheniia i vysokotochnogo opredeleniia parametrov morskikh ledovykh polei i radiolokatsionnaia sistema, ego realizuiushchaia [Method of locating and hi-fi detecting sea ice fields parameters and radar system integrating it]. Patent RF, no. 2011113486/07, 20.11.2012.
4. Alaee M., Firoozmand M., Amiri R., Sepahvand M. Adaptive Thresholding in Marine RADARs. Iranian Journal of Electrical and Electronic Engineering, 2010, vol. 6, no. 3, pp. 168-174.
5. Hsieh T., Wang S., Liu W., Xu N. Sea ice warning visualization and path planning for ice navigation based on radar image recognition. Journal of Marine Science and Technology, 2021, no. 3, pp. 277-286.
