












Russian Federation
The article highlights the results of studying the follow target mode on board the ships equipped with dynamic positioning (DP) systems. There is analyzed the position of a ship in a follow target mode when the DP mode is on, as well as the ability of a ship following a target to hold the position and course under given environmental conditions. Ships equipped with the DP system have strict requirements regarding the parameters of the follow target mode. There are listed the advantages for specific operations: technical servicing the oil and gas fields, examining the pipelines, hydrographic surveys, etc. Functionality of the hydroacoustic reference system, which is the main component of the ship follow target system, is studied. It has been stated that the follow target mode allows the ship to follow the target automatically. In most cases, the target is an unmanned remotely operated vehicle (ROV). ROV is a robot performing specific tasks under water controlled from the ship. ROV support vessels specialize on such operations. The ROV equipment and capabilities depend on the complexity of the task. The simplest tasks are inspection of the pipeline, platform supports, watching divers, visual inspection of an object lowered to the bottom, etc., when ROV is equipped with cameras, searchlights and, occasionally, sonars. To carry out the construction work or maintain the underwater facilities there are needed the servicing ROVs equipped with tools for specific purposes. There has been illustrated a model chart of the ship motion and dislocation of the ROV working area. Connection between ROV and the ship by means of a fiber optic cable is considered in detail, the advantages and disadvantages of this connection are listed. Conclusions are drawn about the widespread use of DP systems on modern ships, in particular those operating in the oil and gas industry, as well as in other areas of marine operations.
vessel, dynamic positioning, target tracking, ship position, system, safety
Введение
Морские подводные объекты должны обладать повышенной надежностью при строительстве и эксплуатации с учетом особых условий: большие глубины моря, длительная протяженность без промежуточных компрессорных станций, штормы, подводные течения, сейсмичность и другие факторы. В процессе строительства и сервиса подводных объектов нефтегазовой промышленности следует учитывать требование, согласно которому морское судно должно оставаться неподвижным или двигаться точно и контролируемо, а также в зависимости от операции судно должно следить за определенной целью в движении.
Материалы исследования
Cуда, вовлеченные в нефтяную промышленность и оснащенные системой динамического позиционирования (DP), должны не только удерживать позицию и курс судна, но и двигаться в зависимости от типа выполняемой работы, удерживая определенный курс или расстояние от определенной цели [1]. Характер работ, выполняемых судном, обусловливает доступные режимы системы. Режим слежения за целью в различных модификациях системы DP называется по-разному: follow target или follow sub mode.
Слежение за целью – режим, при котором судно автоматически следует за целью. В большинстве случаев этой целью является ROV (телеуправляемый необитаемый подводный аппарат). Поскольку ROV намного маневреннее и перед судном не стоит задача реагировать на каждое его движение, используют функцию – радиус реакции, т. е. судно удерживает позицию до тех пор, пока цель находится в пределах границ установленной окружности. Как только цель выходит за пределы окружности, судно перемещается на величину радиуса, а цель снова оказывается в центре окружности (рис. 1).
Для того чтобы следовать за ROV, на судне должна быть установлена HPR (гидроакустическая система отсчета), подключенная к DP-системе [2]. На ROV может быть установлен транспондер или респондер. Разница между ними в том, что транспондер принимает запускающий сигнал от трансдьюсера по воде и посылает сигнал о местоположении тоже по воде, респондер получает запускающий сигнал по соединяющему кабелю, а посылает сигнал по воде. Еще одно важное условие для режима слежения за целью состоит в том, что транспондер или респондер должен быть настроен как мобильная цель. Тогда DP-система не будет использовать его для позиционирования и можно будет настроить режим слежения за целью.
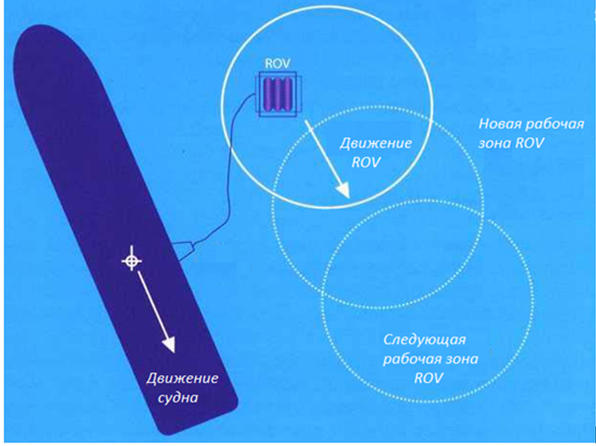
Рис. 1. Перемещение судна в режиме слежения
Fig. 1. Ship motion in a follow target mode
Звук передается в воде в виде волн давления. Вода является сложной средой для распространения звука, и многие физические факторы влияют на звуковые сигналы несколькими способами. Факторами, влияющими на звуковую волну в гидроакустике, являются шум от двигателя судна, бурения, волн и других гидроакустических воздействий, в том числе отражения звука от морского дна, судна, поверхности подводных конструкций и т. д. (рис. 2). Значения скорости звука изменяются в зависимости от температуры и солености.
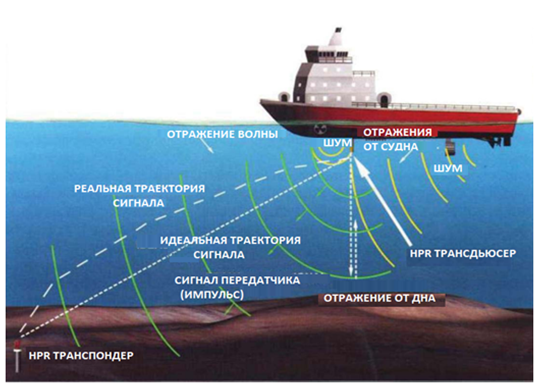
Рис. 2. Факторы, оказывающие влияние на звуковые сигналы
Fig. 2. Factors influencing the sound signals
Связь ROV с судном осуществляется при помощи оптоволоконного кабеля. Основные достоинства этого соединения: большая пропускная способность, небольшие размеры, малый вес; но имеется один недостаток – хрупкость. Кабель с судна на ROV соединяется с распределительным блоком. К этому блоку подключаются все сенсоры, каждый в отдельный выделенный канал. На судне другой конец оптоволоконного кабеля присоединяется к специальному блоку, который считывает информацию, преобразуя ее в нужные форматы для дальнейшего пользования. Этот блок способен осуществлять трансляцию, используя последовательный интерфейс (СОМ-порты) или интернет-соединения [3].
Одним из факторов, вызывающих проблемы в гидроакустике, является акустический шум. Шум генерируется самим судном или буровой установкой, соседними буровыми установками или судами, ROV или волнами. Азимутальные подруливающие устройства обычно производят больше шума, чем туннельные подруливающие устройства. Двигатели производят шум, но они также создают пузырьки воздуха, которые блокируют звуковой сигнал. Сходным образом движение назад и промывка подруливающего устройства между трансдьюсером и транспондером может создать акустические условия [4].
Система HPR определяет положение подводной цели (транспондер/ответчик) узким приемным лучом в направлении его местоположения. Также HPR использует цифровой формирователь луча, который занимает его вход со всех преобразовательных элементов. Система использует ряд широких фиксированных лучей для определения приблизительного положения цели. Как только это будет достигнуто, система будет использовать данные со всех элементов на полусфере, обращенной к цели, для расчета узкого луча приема и оптимизации направленного измерения. Диапазон измеряется путем вычисления временной задержки. Система будет динамически управлять лучом, поэтому он всегда направлен к цели, компенсируя движение цели, вычисляя одновременно крен и дифферент судна. Данные датчика крена и дифферента используются для стабилизации луча, а данные о направлении от компаса вводятся в алгоритм слежения, чтобы направить луч в правильную горизонтальную направляющую. Приемопередатчик HPR (рис. 3) может работать одновременно с 56 транспондерами.

Рис. 3. Компоненты приемопередатчика HPR
Fig. 3. Components of a HPR transceiver
Системы слежения за целью обычно могут работать в одной из двух доступных конфигураций:
– сопровождение одной движущейся цели;
– сопровождение нескольких движущихся целей.
Режим сопровождения одной движущейся цели позволяет судну автоматически следовать за движущейся целью и удерживает судно в «окне положения» по отношению к цели. Движущаяся цель должна быть оснащена мобильным опорным транспондером или лазерным отражателем, чтобы система могла контролировать ее относительное положение. Если, например, движущаяся цель является транспортным средством с дистанционным управлением, судно должно быть оснащено системой HPR. В дополнение к мобильному опорному транспондеру на цели необходима дополнительная фиксированная система относительного позиционирования, например DGPS, или стационарный транспондер, развернутый на морском дне. Можно определить круг операции, внутри которого может перемещаться цель, не приводя к движению судна. Радиус этого круга («радиус реакции») может достигать 1 000 м. Также можно приостановить движение судна в режиме сопровождения цели [5].
Режим сопровождения нескольких движущихся целей позволяет судну DP сопровождать движущуюся конструкцию или судно, снабженное двумя или более целями (например, лазерными отражателями). Обычно можно использовать систему относительного позиционирования Fanbeam с программным обеспечением для двойной цели. Движущуюся конструкцию можно отслеживать по отношению к положению и курсу движения.
Оператор может выбирать между следующими режимами работы:
1. Сопровождение позиции заставляет судно отслеживать движущуюся конструкцию относительно положения. Судно всегда будет сохранять одинаковое положение по отношению к движущейся конструкции при поддержании абсолютного курса.
2. Сопровождение курса заставляет судно отслеживать движущуюся конструкцию относительно курса. Судно всегда будет сохранять одинаковый курс по отношению к движущейся конструкции при поддержании абсолютного положения.
3. Сопровождение позиции и курса заставляет судно отслеживать движущуюся конструкцию относительно положения и курса. Судно всегда будет сохранять одинаковое положение и курс по отношению к движущейся конструкции.
Заключение
Гидрографическое обеспечение строительства подводных объектов является наиболее сложным видом инженерных гидрографических работ. Режим слежения за целью на судах, оснащенных системой DP, является важным инструментом для судов, вовлеченных в нефтегазовую промышленность. Поскольку системы DP широко используются во всех видах морских операций, данный инструмент дает возможность для более качественного обслуживания подводных объектов и представляет ценность для судоводителей.
1. Shostak V. P. Dinamicheskoe pozitsionirovanie plavuchikh ob"ektov [Dynamic positioning of floating objects]. Chikago, Megatron Publ., 2010. 130 p.
2. İMO MSC Circular 645 Guidelines for vessels with dynamic positioning systems. The International Marine Contractors Association, 1994. 20 p.
3. Mandt M., Gade K., Jalving B. Integrating DGPS-USBL position measurements with inertial navigation in the HUGIN 3000 AUV. Proceedings of the 8th Saint Petersburg International Conference on Integrated Navigation Systems (Saint Petersburg, 28-30 May 2011). Saint Petersburg, State research center of Russia “Electropribor”, 2001. 300 p.
4. Hubert Faÿ. Dynamic Positioning Systems: Principles, Design and Applications. Editions OPHRYS, 1990, 189 p.
5. Keedwell S. Advancing the art of subsea inspection. Offshore (Tulsa), 2011, vol. 71, no. 4, pp. 102-103.
