












The article considers the problem of improving the quality of electricity, in particular the power factor. The increased value of the power factor leads to decreasing the reactive component of the currents in the ship power network and, as a result, to a decreased power of converting equipment, generators and cable products. There is studied a section in the methodology of designing ship electrical machines developed at the Department of Electric Drives and Electrical Equipment of Coastal Power Plants in Admiral Makarov State University of Maritime and Inland Shipping, which allows to evaluate the parameters of asynchronous electric motors at the design stage. Today, in designing electrical machines there are used the methods developed in the last century, which do not allow to carry out electromagnetic calculations subject to the required value of the power factor. The power factor is known to be determined by empirical formulas after setting the main parameters of the mechanism. The equivalent circuit of asynchronous electric motor containing the parameters of stator and rotor windings, and its mathematical description based on equations corresponding to Kirchhoff's laws are considered. Transformations of the equations describing the electromagnetic processes in the engine given for the static mode of operation in a complex form are made. There are given the expressions that allow determining the magnetizing current, magnetic conductivities, magnetizing forces, air gap and magnetic saturation coefficients, overall dimensions of the electric motor, and electromagnetic torque that it develops. Basing on the transformed equations describing an asynchronous electric motor there have been derived the regularities that help set the value of the power factor as initial data at the stage of design. The practical significance of the applied methodology and importance of the chosen subject have been analyzed.
design technique, propulsion motor, asynchronous motor, power factor, ship electrical equipment
Введение
В настоящее время вопрос обеспечения высокого коэффициента мощности электродвигателей судовых электроприводов является актуальным. Многие ученые исследуют вопросы повышения качества электроэнергии, в том числе повышения коэффициента мощности. Использование гребных электрических двигателей с высоким коэффициентом мощности при построении систем электродвижения позволяет понижать мощность преобразователей частоты, при этом уменьшается мощность, габариты главных генераторов и сечение кабельной продукции. Таким образом снижаются затраты на создание электроэнергетической системы судна, а также уменьшаются массогабаритные характеристики оборудования, при этом на судне освобождается полезная площадь [1–6].
Современный ледокольный флот Российской Федерации пополняется мощнейшими ледоколами проекта 22220 мощностью 60 МВт, также планируется к постройке ледокол проекта 10510 мощностью 120 МВт. На этих ледоколах в качестве гребных электродвигателей применяются асинхронные машины с короткозамкнутым ротором [7–9]. Как правило, проектирование этого типа электродвигателей основывается на эмпирическом опыте, где
в основу проектирования положены основные параметры машины, такие как мощность, напряжение и угловая частота вращения. Такие параметры, как коэффициент мощности и коэффициент полезного действия, определяются в результате проектирования на основе закономерностей, полученных еще в 1950–1960 гг. ХХ в. [10–12]. Подобные методы не позволяют проектировать машины с заданным коэффициентом мощности.
Задачей настоящего исследования является разработка методики определения основных параметров асинхронного электродвигателя с заданным коэффициентом мощности.
Методы и материалы исследования
На кафедре электропривода и электрооборудования береговых установок ФГБОУ ВО «Государственный университет морского и речного флота им. адмирала С. О. Макарова» была разработана методика проектирования электрических асинхронных машин с короткозамкнутым ротором. В настоящей работе предлагается метод оценки габаритных параметров асинхронного электродвигателя с заданным коэффициентом мощности, используемый в данной методике. В работе для получения результатов применялись методы математического анализа.
Результаты исследования
Совокупность параметров, характеризующих асинхронный двигатель, приведена на схеме замещения (рис. 1). Данная схема замещения не учитывает насыщение стали магнитопровода и магнитные потери мощности.
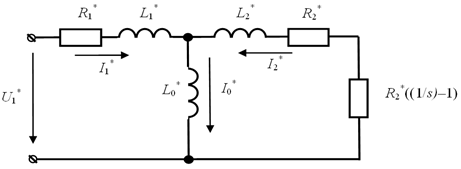
Рис. 1. Схема замещения фазы асинхронного электродвигателя, где s = w2 / w1 – скольжение
Fig. 1. Phase replacement circuit of an asynchronous electric motor, where s = w2 / w1 – slip
Вышеобозначенной схеме соответствует система уравнений напряжений в комплексной форме записи, составленных согласно законам Кирхгофа:
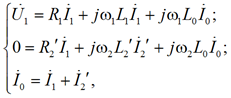
где w1 и w2 – частота токов обмоток статора и ротора, рад/с; и
– комплексы токов обмоток статора и ротора, А;
– комплекс фазного напряжения обмотки статора, В. Эти уравнения записаны для статического режима работы асинхронного двигателя при подключении к обмотке статора синусоидального напряжения с угловой частотой w1. Модули векторов токов и напряжений являются амплитудами синусоидальных токов
и напряжений.
Комплексы токов и напряжения
Систему уравнений (1) преобразуем к виду, который используется далее при проектировании асинхронного двигателя. Напряжениям и токам соответствуют векторы на комплексной плоскости. Действительную ось будем обозначать d и называть продольной. Мнимую ось будем обозначать q и называть поперечной. Пример графического изображения вектора тока в обмотке статора приведен на рис. 2.
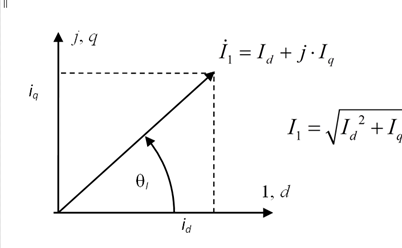
Рис. 2. Представление вектора тока на плоскости d – q, где qI – угол токовой нагрузки
Fig. 2. Representation of the current vector on the plane
d – q, where qI ‒ angle of the current load
Аналогично изображаются на плоскости d – q все векторы токов и напряжений. Обозначим
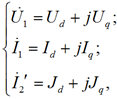
где j = – мнимая единица. При вращении векторов их проекции будут синусоидальными функциями с угловой частотой, равной угловой скорости вращения вектора. Если принять, что оси d – q вращаются с угловой частотой напряжения (тока) обмотки статора, то проекции векторов на оси d – q будут постоянными числами.
Будем полагать, что оси координат вращаются
с угловой частотой напряжения (тока) обмотки статора. Положение магнитных осей d – q в силу симметрии магнитной системы асинхронного двигателя может быть выбрано произвольно. Выберем начальное положение векторов так, что действительная часть вектора тока ротора Jd = 0. Если
переменные из системы уравнений (2) подставить в (1) и разделить первые два уравнения на уравнения действительной и мнимой частей, то получим систему из четырех уравнений:
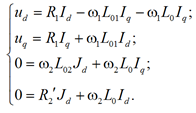
Из третьего уравнения системы (3) следует
Из четвертого уравнения системы (3) следует
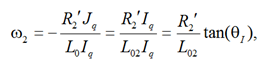
где qI – угол токовой нагрузки, рад.
Если в первое и второе уравнения системы (3) подставить выражение (4), то получим уравнения напряжений для обмотки статора:
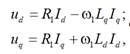
где Ld = L01 » L02 – продольная индуктивность обмотки статора, Гн; Lq = (L01L02 – L02) / L02 » L1 + L2¢ – поперечная индуктивность обмотки статора (индуктивность короткого замыкания), Гн; L1 » L2¢ – индуктивности рассеяния обмоток статора и ротора, Гн.
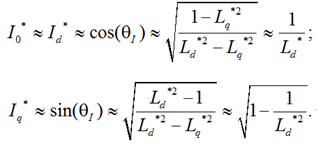
Связь продольной и поперечной индуктивности
с номинальными токами в относительных единицах:
 (5)
(5)
(6)
Знаки приближения в данных формулах обусловлены допущением R1 = 0.
Параметры Ld* и Lq* определяют коэффициент мощности проектируемой машины:
 (7)
(7)
Намагничивающий ток определяется выражением
 (8)
(8)
где L02 = L0 + L2 – полная индуктивность обмотки ротора, Гн.
Из выражения (8) следует, что в намагничивании машины участвуют продольный и поперечный токи. Однако вклад поперечного тока в намагничивание машины ничтожно мал, поэтому далее примем, что I0 = Id.
Магнитная проводимость воздушного зазора связана с геометрическими размерами машины соотношением
где m0 = 4p · 10–7 – магнитная проницаемость воздуха, Гн/м; St = prl / p – площадь под полюсом в воздушном зазоре, м2; p – число пар полюсов;
r – внутренний радиус цилиндра магнитопровода статора, м; l – длина цилиндра магнитопровода, м; d0 – геометрический воздушный зазор между магнитопроводом статора и ротора, м; kz > 1 – коэффициент зубчатости магнитопровода статора и ротора.
Основная магнитная проводимость машины определяется магнитной проводимостью воздушного зазора и магнитопровода:
 (9)
(9)
где lм – магнитная проводимость магнитопровода, Вб/А; d = d0kd – расчетный воздушный зазор, м; kd = kmkz – коэффициент воздушного зазора; km – коэффициент магнитного насыщения.
Коэффициент воздушного зазора определяется выражением
![]()
Коэффициент магнитного насыщения определяется выражением
![]()
где UZ1, UZ2, Ua1, Ua2, Ud – магнитные напряжения
в зубах и ярме статора и ротора, а также в воздушном зазоре, А/м.
Намагничивающая сила m-фазной обмотки статора разделяется на ортогональные составляющие: продольную Fd и поперечную Fq. Основное намагничивание машины осуществляется продольной намагничивающей силой.
Модуль вектора намагничивающей силы:
![]()
где Fd = Facos(qI) и Fq = Fasin(qI) – продольная
и поперечная намагничивающая сила, А.
Намагничивающие силы m-фазной обмотки статора связаны с токами статора соотношениями

где m – число фаз; kоб – обмоточный коэффициент; w1 – число витков фазной обмотки статора;
Ia – модуль вектора тока, А; Id и Iq – продольный
и поперечный токи, А.
Магнитный поток, протекающий через полюсное деление воздушного зазора, создается продольной намагничивающей силой обмотки и определяется выражением
![]()
где Bd – максимальная магнитная индукция в воздушном зазоре, Тл.
Можно записать выражение для закона полного тока в следующем виде:
Определение внутреннего радиуса магнитопровода статора
Связь площади поперечного сечения пазов статора с модулем намагничивающей силы:
где kз.м » (0,18÷0,3) – коэффициент заполнения пазов статора медью; j1 » (4,5÷5,8) · 106 – плотность тока в обмотке статора, А/м2; w1 – число витков на фазу.
Расчетный воздушный зазор между статором
и ротором стремятся задать таким образом, чтобы его можно было реализовать технически. Эмпирическая формула
определяет минимальный относительный геометрический воздушный зазор между магнитопроводом статора и ротора, который может быть технически реализован.
Относительный расчетный воздушный зазор может быть оценен по формуле
где kd – коэффициент воздушного зазора, принимаемый в диапазоне 1,3÷1,6 и учитывающий зубчатость магнитопровода и его магнитное сопротивление.
Электромагнитный момент в системе координат d – q запишем в следующем виде:
где l0 – основная магнитная проводимость
машины (9).
Из выражений (9)–(11) можно вывести внутренний радиус магнитопровода статора:
где l* = l / r – заданное относительное значение длины магнитопровода; d – заданное относительное значение расчетного воздушного зазора.
Обсуждение
Статор машины состоит из медной обмотки, уложенной в пазы, и магнитопровода. Угол токовой нагрузки qI (обычно этот угол называют cosφ) влияет на распределение объема меди обмотки
и объема магнитопровода. Уменьшение qI ведет
к увеличению объема магнитопровода и уменьшению объема меди обмотки. Справедливо также обратное: увеличение qI ведет к уменьшению
объема магнитопровода и увеличению объема
меди обмотки.
Определить угол токовой нагрузки qI можно решением оптимизационных задач с различными критериями, такими как стоимость меди обмотки
и стали магнитопровода, потери мощности, габариты магнитопровода.
Другой подход состоит в задании значения угла токовой нагрузки qI из соображений получения нужных эксплуатационных характеристик. Так, если задано относительное значение продольной индуктивности Ld*, то угол токовой нагрузки qI можно оценить, используя соотношение (5). Относительное значение продольной индуктивности Ld* определяет относительное значение тока намагничивания
и тока нагрузки (6). Опыт проектирования электрических машин подтверждает, что Ld* » 1,5÷3,0.
Относительная поперечная индуктивность Lq* слабо влияет на величину угла токовой нагрузки qI и является у асинхронного двигателя величиной, которая может быть выбрана из интервала
0,14–0,2. Кроме того, если задать параметры Ld*
и Lq*, то коэффициент мощности проектируемой машины определится формулой (8). Поэтому далее полагается, что при проектировании машины задаются продольная и поперечная индуктивности Ld* и Lq* и оцениваются по формулам (5)–(7) продольный и поперечный токи в относительных единицах, а также коэффициент мощности.
Заключение
Согласно вышеописанной методике проектирования гребных электродвигателей возможно осуществлять расчет электрических машин с заданным коэффициентом мощности, что позволит получить ощутимую экономическую выгоду при разработке единых электроэнергетических систем
с системами электродвижения судов. Представленная в настоящей работе методика может быть использована также для проведения расчетов электродвигателей общепромышленного назначения. Она позволяет в результате проектирования электрических машин получать расчетные параметры, близкие к параметрам аналогичных по частоте вращения, мощности и другим характеристикам двигателей из каталогов различных компаний-производителей электрических машин, что свидетельствует об адекватности применяемого метода
1. Zhumagaliyev Ye., Yessengaliyev D., Kambar R., Yermetov S. Voltage Regulation As a Source to Increase the Quality of Electric Power // Tr. un-ta. 2021. № 4 (85). S. 286-291.
2. Zhelezko Yu. S. Nauchno-metodicheskie osnovy strategii snizheniya poter' i povysheniya kachestva elektroenergii v elektricheskih setyah: avtoref. dis. … d-ra tehn. nauk. M., 1996. 46 s.
3. Prohorenkov A. M., Remezovskiy V. M. Programmno-apparatnaya realizaciya sistemy povysheniya kachestva elektroenergii na sudah // Vestn. MGTU. Tr. Murmansk. gos. tehn. un-ta. 1998. T. 1. № 1. S. 17-20.
4. Aliev D. S., Haitov K. H. Povyshenie koefficienta moschnosti v asinhronnyh elektrodvigatelyah peremennogo toka // Problemy elektroenergetiki i telekommunikaciy Severa Rossii - 2021: sb. st. II Vseros. s mezhdunar. uchastiem nauch.-prakt. konf. (Surgut, 22-23 aprelya 2021 g.). M.: Znanie-M, 2021. S. 95-100.
5. Papulovskiy A. S., Papulovskiy S. S. Sposoby povysheniya koefficienta moschnosti asinhronnyh dvigateley s korotkozamknutym rotorom // Nauka i obrazovanie: aktual'nye voprosy teorii i praktiki: materialy Mezhdunar. nauch.-metod. konf. (Orenburg, 23 marta 2021 g.). Orenburg: Izd-vo OrIPS - filial SamGUPS, 2021. S. 140-143.
6. Verma M., Phares D., Dick B. Medium Voltage Adjustable Speed Drives: Power Factor and Motor Control - A Beautiful Combination, 2019 IEEE-IAS/PCA Cement Industry Conference (IAS/PCA), St. Louis, MO, USA, 2019. P. 1-11.
7. Kovalenko A. S., Morgunova M. O., Gribkovskaya V. V. Infrastrukturnaya sinergiya Severnogo morskogo puti v mezhdunarodnom kontekste // Energet. politika. 2018. № 4. S. 57-67.
8. Mit'ko A. V. Obnovlenie arkticheskogo flota // Delovoy zhurn. Neftegaz.RU. 2021. № 6 (114). S. 48-52.
9. Levshenkov V. N. 60 let atomnomu ledokol'nomu flotu // Innovacionnye napravleniya razvitiya v obrazovanii, ekonomike, tehnike i tehnologiyah: sb. st. Nac. nauch.-prakt. konf. (Stavropol', 03-05 iyunya 2020 g.). Stavropol': Stavrolit, 2020. S. 408-411.
10. Kopylov I. P., Klokov B. K., Morozkin V. P., Tokarev B. F. Proektirovanie elektricheskih mashin. M.: Yurayt, 2011. 767 s.
11. Gol'dberg O. D., Sviridenko I. S. Proektirovanie elektricheskih mashin. M: Vyssh. shk., 2006. 430 s.
12. Proektirovanie tyagovyh elektricheskih mashin / pod red. M. D. Nahodkina. M.: Transport, 1976. 624 s.
