












graduate student
Russian Federation
Kamchatka, Russian Federation
A specialized diagnostic algorithm was developed and experimentally tested for the automatic detection of anomalies in the operation of reed-switch level meters with a standardized 4-20 mA current output. The first stage involved a detailed analysis of typical failures common to this class of sensors, including contact sticking, zero drift, signal line breaks, and false triggering due to external vibrations or magnetic interference. Particular attention was paid to the specifics of operation on ships, where high humidity, temperature fluctuations, and mechanical stress accelerate component degradation. The most vulnerable design components were identified, quantitative reliability criteria were defined, and technical requirements for the diagnostic module were formulated, including those for speed, accuracy, and resistance to false triggering. The algorithm operates by comparing the current analog signal value with the expected behavior determined by external control commands and the history of previous measurements, including dynamic patterns of level changes. To improve reliability, a sliding analysis window and adaptive thresholds are used, taking into account the current operating mode of the object. The implementation is based on a microcontroller with hardware support for analog-to-digital conversion, ensuring compactness, low power consumption, and compatibility with industrial interfaces. Laboratory testing confirmed the device's ability to reliably detect both static and dynamic faults, including the absence of a response to a level change in the presence of a control action. The proposed solution can be used standalone or integrated into existing ship power management systems, increasing their fault tolerance through the early detection of hidden defects. This work opens up prospects for expanding the diagnostic functionality of analog sensors in conditions with limited access to maintenance, particularly in onshore infrastructure and autonomous power facilities.
control system, reed level meter, diagnostics, fault identification, analog signal
Введение
Работа современных судовых энергетических комплексов в значительной степени зависит от корректного функционирования автоматизированных систем управления. Одной из важнейших задач систем управления, в свою очередь, является предотвращение работы оборудования в недопустимых режимах. Реализация этой функции достигается за счет непрерывного контроля технологических параметров при помощи измерительных устройств, входящих в состав информационно-измерительных каналов [1, 2]. Показания датчиков считываются контроллером, где сравниваются с заданными уставками. При выходе параметра за установленные границы активируется аварийно-предупредительная сигнализация, что, как правило, сопровождается информированием оператора и при необходимости принудительной остановкой агрегата [3, 4].
Следует учитывать, что источником ложного срабатывания защитной логики может выступать не технологический процесс, а отказ или деградация измерительного канала. Подобные ситуации создают существенные сложности при диагностике, поскольку обслуживающий персонал, руководствуясь статистикой отказов, в первую очередь склонен предполагать неисправность в механической или гидравлической части системы, а не в измерительной цепи. Это приводит к неоправданным временным затратам на поиск несуществующей проблемы, увеличению простоев оборудования, а в критических случаях к развитию аварийных сценариев, которые могли бы быть предотвращены при своевременной идентификации истинной причины сбоя [5–7].
Особую уязвимость в условиях судовой эксплуатации демонстрируют герконовые уровнемеры. Конструкция таких датчиков включает подвижные элементы и является чувствительной к внешним механическим воздействиям. Длительная вибрация, характерная для судовых машинных отделений, может вызывать ослабление креплений, смещение поплавка, залипание герконов или перетирание изоляции проводников. Кроме того, агрессивная среда – повышенная влажность, перепады температуры, конденсат, солевые отложения – способствует ухудшению сопротивления изоляции, коррозии контактов и, как следствие, возникновению дрейфа нуля, нелинейности выходного сигнала или полного обрыва цепи. В таких условиях система управления может интерпретировать искаженный сигнал как реальное изменение уровня, что приведет к необоснованному срабатыванию защиты [8, 9].
Очевидным решением является дублирование измерительного канала с последующим сравнением показаний двух независимых датчиков. Недостатком данного решения является его экономическая нецелесообразность. Альтернативой служат методы, основанные на анализе поведения сигнала во времени, включая оценку скорости изменения, стабильности показаний, наличия аномальных скачков или залипаний на фиксированных значениях. Такой подход не требует установки дополнительного оборудования и может быть реализован программно на уровне контроллера или внешнего диагностического модуля.
Целью данной работы является разработка экспериментального образца программно-аппаратного устройства, предназначенного для автоматизированного выявления неисправностей герконового уровнемера при помощи анализа его выходного аналогового сигнала 4–20 мА. Выбор именно этого типа датчика обусловлен его широким применением. Использование унифицированного токового сигнала позволяет обеспечить совместимость с большинством промышленных контроллеров и упрощает интеграцию разработанного решения в существующие архитектуры автоматизации.
Материалы и методы исследования
В качестве материалов исследования использовался унифицированный аналоговый сигнал тока 4–20 мА с герконового уровнемера. Метод идентификации неисправности герконового уровнемера был построен на ступенчатом изменении аналогового выходного сигнала с определенным шагом. Каждый герконовый уровнемер работает по принципу замыкания геркона поплавком, положение которого соответствует определенному уровню. На основании этого строится идентификация неисправного состояния. Для герконового уровнемера длиной 1 м и числом герконов 100 штук с расстоянием между ними в 1 см шаг аналогового выходного сигнала соответствует 0,16 мА. Эта информация использовалась для выявления неисправного геркона. В случае обнаружения изменения сигнала более чем на 0,31 мА можно идентифицировать, что геркон в датчике не замыкается. Фактически у данного уровнемера была определена слепая зона. Соответственно, при достижении данного уровня система управления будет расценивать показание как минимальное значение.
Другой немаловажной проблемой является залипание контакта геркона в уровнемере. При таком состоянии выходной аналоговый сигнал будет неизменным на определенном участке измерения уровня. В первую очередь, это связано со схемой соединения электронных компонентов герконового датчика. Для обнаружения данного рода неисправности системе управления необходимо иметь информацию о тенденции изменения уровня. В качестве такой информации могут служить дискретные сигналы о включении и отключении насосов, открытии или закрытии клапанов и кранов установки.
Данный метод был реализован в виде алгоритма. На базе данного алгоритма строилась программная часть прототипа устройства идентификации неисправности.
Аппаратная часть прототипа устройства была построена на базе микроконтроллера ATmega328P со следующими электронными компонентами: стабилизатор напряжения L7805CV-DG, резисторы номинальными сопротивлениями 250 Ом, красный светодиод, кнопка. Все компоненты были размещены и спаяны на распаечной макетной плате.
Для проведения испытаний разработанного устройства был использован многофункциональный калибратор Beamex MC5-R в качестве имитатора унифицированного аналогового сигнала тока 4–20 мА, источник питания АТН-2031.
Результаты исследования
Алгоритм функционирования устройства идентификации неисправности уровнемера предполагает последовательное выполнение ряда логически взаимосвязанных этапов, обеспечивающих диагностику состояния измерительной системы.
На первом этапе осуществляется оценка текущего состояния объекта контроля. Данная процедура реализуется при помощи анализа входных дискретных сигналов, поступающих от внешних источников и свидетельствующих о факте изменения уровня рабочей среды в резервуаре. Наличие или отсутствие указанных сигналов служит ключевым индикатором для инициации последующих операций алгоритма.
Второй этап предполагает количественную оценку динамики изменения уровня жидкости или иной контролируемой среды. Для этого производится сравнение текущего значения измеряемого параметра с предыдущим, зафиксированным на предшествующем цикле измерения. Вычисляется абсолютная разность между этими величинами, которая интерпретируется как фактическое изменение уровня за заданный временной интервал.
Далее система выполняет верификацию полученных данных. Если вычисленное изменение уровня превышает заранее установленный пороговый критерий или, напротив, отсутствует какое-либо изменение при наличии подтвержденного внешнего сигнала о начале процесса повышения или понижения уровня, то данная ситуация интерпретируется как неисправность. В таких случаях алгоритм генерирует дискретный выходной сигнал тревоги. Структурная схема алгоритма представлена на рис. 1.
Аппаратная реализация устройства базируется на микроконтроллере с функционально взаимосвязанными электронными компонентами. Элементы устройства размещены на распаечной макетной плате. Электропитание системы организовано при помощи стабилизатора напряжения L7805, обеспечивающего на выходе 5 В при входном напряжении в диапазоне от 7 до 35 В. Центральным элементом аппаратного комплекса выступает микроконтроллер, выполняющий функции первичной обработки входных сигналов, логического анализа состояния системы и управления выходным сигналом о сигнализации неисправности уровнемера. Входной аналоговый сигнал, представленный в виде унифицированного токового сигнала стандарта 4–20 мА, преобразуется в измеряемое напряжение посредством резисторов общим сопротивлением 250 Ом. Данное значение выбрано, поскольку обеспечивает линейное преобразование тока в напряжение в диапазоне от 1 до 5 В, что соответствует входному диапазону аналого-цифрового преобразователя микроконтроллера.
Для визуальной индикации сбоя предусмотрена активация дискретного выхода микроконтроллера, подключенного к красному светодиоду. Включение светодиода служит оператору визуальным сигналом о возникновении неисправности. Для обеспечения возможности ручного сброса ошибки и возобновления нормального функционирования устройства в схему интегрирована кнопка. Кнопка подключается к отдельному цифровому входу микроконтроллера. Нажатие кнопки требуется после выхода сигнала об ошибке для возврата устройства идентификации в штатный режим работы.
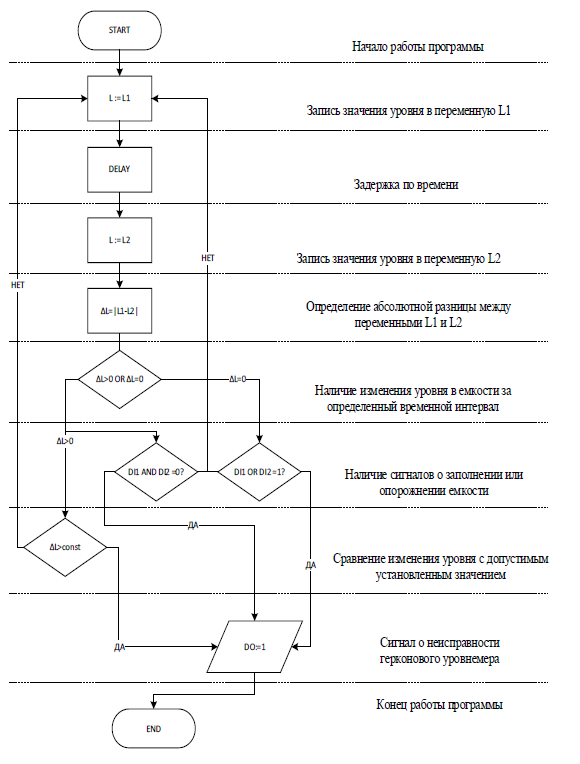
Рис. 1. Алгоритм работы устройства идентификации неисправности уровнемера
Fig. 1. Algorithm of operation of the level meter malfunction identification device
Принципиальная электрическая схема устройства представлена на рис. 2, общий вид устройства после сборки приведен на рис. 3.
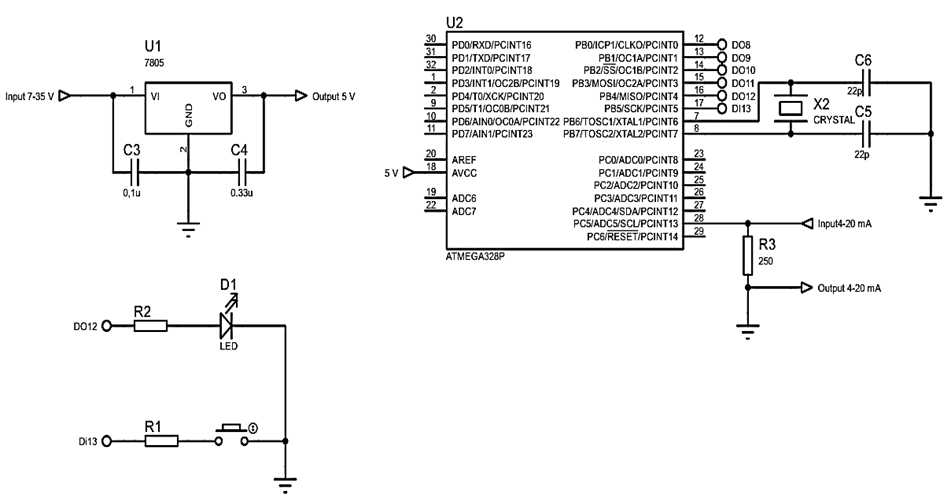
Рис. 2. Принципиальная электрическая схема устройства
Fig. 2. Schematic diagram of the device
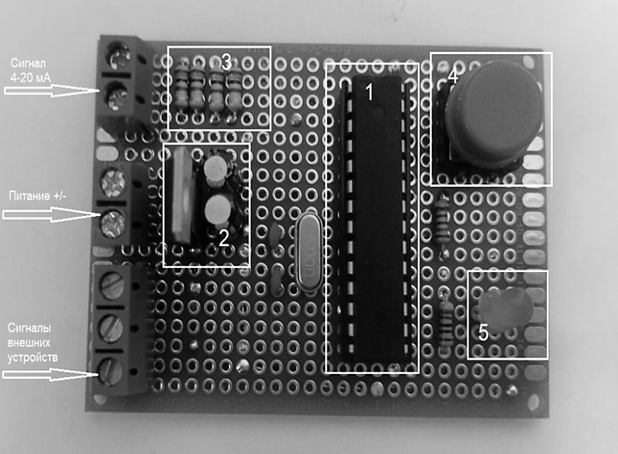
Рис. 3. Прототип устройства идентификации неисправности герконового уровнемера: 1 – микроконтроллер ATmega328P; 2 – стабилизатор напряжения L7805; 3 – резисторы общим сопротивлением 250 Ом; 4 – кнопка; 5 – красный светодиод
Fig. 3. Prototype of the reed level sensor malfunction identification device: 1 – ATmega328P microcontroller; 2 – L7805 voltage stabilizer; 3 – 250 Ohm resistors; 4 – button; 5 – red LED
Для произведения проверки работоспособности к прототипу устройства подключались источник питания АТН-2031 и многофункциональный калибратор MC5-R для имитации показаний датчика (рис. 4). Процедура проведения проверки работоспособности производилась посредством имитации значения аналогового сигнала тока 4–20 мА и дискретных сигналов состояния системы.
Необходимо отметить, что разработанное устройство не может быть применено ко всем типам герконовых уровнемеров без дополнительной настройки, причина этому – разные шаги изменения уровня выходного аналогового сигнала, зависящие от длины уровнемера и количества герконов.
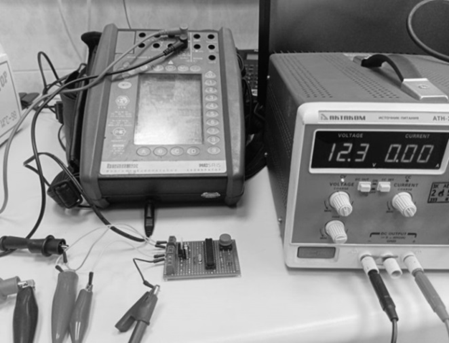
Рис. 4. Процедура проведения проверки работоспособности прототипа
Fig. 4. Procedure for testing the functionality of the prototype
Процедура тестирования состояла из нескольких этапов. В первую очередь производилась имитация аналогового сигнала с многофункционального калибратора MC5-R в прототип устройства идентификации для оценки работоспособности системы при изменении параметра тока с отсутствующими входными сигналами. Результаты проведения проверки представлены в таблице.
Величины изменения тока датчика
The magnitude of the change in sensor current
|
Изменение тока ∆I, мА |
Направление изменения |
Результат |
|
0,05 |
Повышение |
Не сработало |
|
0,1 |
Повышение |
Не сработало |
|
0,15 |
Повышение |
Не сработало |
|
0,2 |
Повышение |
Сработало |
|
0,25 |
Повышение |
Сработало |
|
0,3 |
Повышение |
Сработало |
|
0,05 |
Понижение |
Не сработало |
|
0,1 |
Понижение |
Не сработало |
|
0,15 |
Понижение |
Не сработало |
|
0,2 |
Понижение |
Сработало |
|
0,25 |
Понижение |
Сработало |
|
0,3 |
Понижение |
Сработало |
Далее производилась проверка для каждого дискретного сигнала и реакции устройства на изменение аналогового входа при их наличии. Все этапы сопровождались регистрацией выходных сигналов в виде подачи питания микроконтроллером на красный светодиод при обнаружении некорректного аналогового сигнала.
Обсуждение
Внедрение специализированных диагностических устройств в состав систем управления судовым энергетическим комплексом сопровождается достижением ряда существенных эксплуатационных и технико-экономических преимуществ. Наиболее значимым из них является повышение оперативности диагностики неисправностей, что напрямую сказывается на эффективности работы машинной команды.
Особую ценность представляет возможность использования дискретного сигнала о неисправности, формируемого диагностическим модулем в качестве управляющего воздействия для модификации логики работы защитных алгоритмов. Например, при подтвержденной неисправности датчика, а не самого технологического параметра, система может временно приостанавливать или адаптировать процедуры минимизации последствий аварий.
Ключевым практическим результатом интеграции подобных решений является кардинальное повышение уровня готовности энергетической установки к эксплуатации в автономных условиях. Вместо многоэтапной ручной диагностики, требующей значительных трудозатрат и высокой квалификации персонала, система предоставляет оператору информацию об источнике неисправности. Это может помочь снизить вероятность ошибочных вмешательств и сократит простои оборудования.
Следует отметить, что область применения разработанного устройства ограничена определенными конструктивными особенностями существующих герконовых уровнемеров. В частности, универсальная настройка невозможна без предварительной адаптации программного обеспечения или аппаратных параметров, поскольку разные модели уровнемеров характеризуются неодинаковой дискретностью изменения выходного аналогового сигнала. Эта дискретность определяется длиной измерительного устройства и количеством установленных в ней герконов. Соответственно, для корректного распознавания состояния необходимо индивидуально настраивать пороговые значения и временные задержки в алгоритме обработки сигнала под конкретную задачу.
Таким образом, реализация интеллектуальных диагностических функций в составе систем управления судовым энергетическим комплексом представляет собой перспективное направление развития судовой автоматики, отвечающее современным требованиям к безопасности, эффективности и автономности морских судов.
Заключение
В рамках выполнения данной работы были разработаны и экспериментально опробованы алгоритмы и методы для автоматического обнаружения неисправностей герконовых уровнемеров, генерирующих унифицированный аналоговый выходной сигнал в диапазоне 4–20 мА.
На начальном этапе исследования был выполнен системный анализ типовых неисправностей, характерных для герконовых уровнемеров. На основе полученных данных были выделены критические узлы, наиболее подверженные деградации в условиях эксплуатации, и сформулированы технические требования к диагностическому модулю.
На следующем этапе был синтезирован алгоритм диагностики, основанный на сопоставлении динамики изменения выходного тока с ожидаемым поведением, заданным внешними управляющими сигналами и предыдущими состояниями системы. Алгоритм основывается на логике сравнения аналогового сигнала датчика с состоянием системы. Экспериментальная проверка работоспособности прототипа подтвердила корректность заложенных принципов функционирования.
Полученные результаты свидетельствуют о практической применимости предложенного технического решения для повышения уровня отказоустойчивости судовых систем управления. Разработанный прототип может быть использован как самостоятельное диагностическое средство либо интегрирован в состав существующих систем автоматики в качестве модуля расширенной проверки целостности измерительных каналов.
1. Burkov D. E. Primenenie sudovoj informacionnoj sistemy dlya kontrolya i monitoringa tekhnicheskogo sostoyaniya sudovogo oborudovaniya [Application of the ship information system for control and monitoring of the technical condition of the ship's equipment]. Vestnik Gosudarstvennogo universiteta morskogo i rechnogo flota imeni admirala S. O. Makarova, 2023, vol. 15, no. 5, pp. 893-902.
2. Ambrosovskaya E. B., Ambrosovskij V. M., Romaev D. V. Matematicheskie modeli v otladochnyh stendah dlya sudovyh sistem upravleniya [Mathematical models in debugging stands for shipboard control systems]. Morskie intellektual'nye tekhnologii, 2023, no. 3-1 (61), p. 89.
3. Zhang X., Li J., Ma F., Xu X. Fault estimation and H fuzzy active fault-tolerant control design for ship steering autopi-lot subject to actuator and sensor faults. IEEE Sensors Journal, 2023, vol. 23, no. 22, pp. 28110-28119.
4. Prabowo A. R., Tuswan T., Ridwan R. Advanced development of sensors’ roles in maritime-based industry and re-search: From field monitoring to high-risk phenomenon measurement. Applied Sciences, 2021, vol. 11, no. 9, p. 3954.
5. Nguyen T. N., Ponciroli R., Bruck P., Esselman T. C. A digital twin approach to system-level fault detection and diagnosis for improved equipment health monitoring. Annals of nuclear energy, 2022, vol. 170, p. 109002.
6. Nizar A. M., Miwa T., Ozaki T., Uchida M. Aiming for Alarm System Improvements for Ship Engine Operation Using Engine Control Console Alarm Data. Marine Engineering, 2021, vol. 56, no. 6, pp. 961-969.
7. Poornikoo M., Gyldensten W., Vesin B., Overgard K. Trust in automation (TiA): simulation model, and empirical findings in supervisory control of maritime autonomous surface ships (MASS). International Journal of Human – Computer Interaction, 2025, vol. 41, no. 12, pp. 7521-7548.
8. Aalberg A. L., Holen S. M., Kongsvik T., Wahl A. M. Does it do the same as we would? How trust in automated shipboard systems relates to seafarers’ professional identity. Safety science, 2024, vol. 172, p. 106426.
9. Prejbeanu R. G. A Sensor-based system for fault detection and prediction for EV multi-level converters. Sensors, 2023, vol. 23, no. 9, p. 4205.
